Изобретение относится к сило- змерительной технике и может быть использовано для сшюмоментного очувствления роботов разл иного назначения в металлургии, машиностроении и др.
Целью изобретения является повышение чувствительности и точности измерения и возможности использования датчшса в роботах при сборочных операциях, На фиг. 1-3 изображены три проёк-,
ции конструкции датчика.
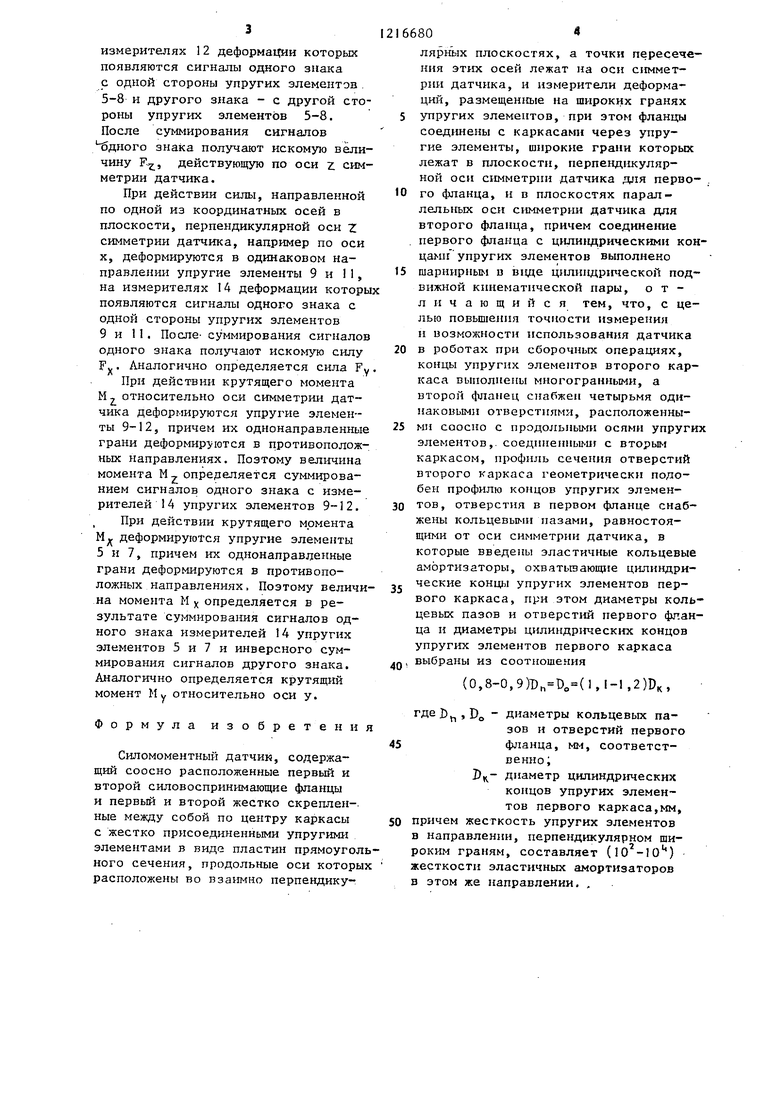
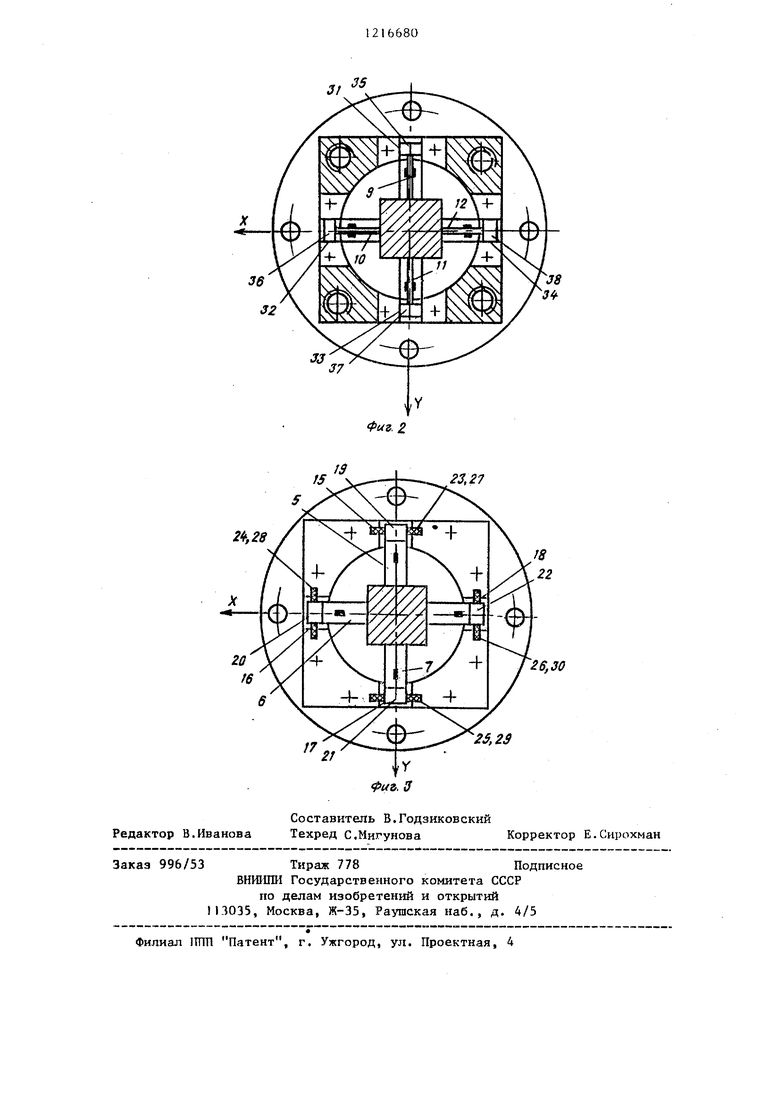
Датчик содержит соосно расположенные первый и второй ci-шовоспри- нимаю1дие (1щанцы 1 и 2, первый и - второй каркасы 3 и 4 с жестко присоедннепными упругими элементами соответственно 5-12 в виде пластин, продольные оси которых расположены во взаимно перпендикулярных плоскостях, образованных,, например, координатньм осями х, у, а точки пересечения продольных осей ежат на oci: Z. симметрии датчика, и измерители 13 и 14 деформаций, размеп егпше на широких гранях эле-, ментов 5-12. Продольные упругие элементы 5-7, 6-8 и 9-11, 10-Г2 лежат во взаимно периендикулярпых плоскостях, пересекающихся по оси симметрии датчика. Фланец 1 связан с каркасом. 3 через упругие элементы 5-8, широкие грани которьпс лежат в плоскости перпендикулярной оси Z датчика. Фланец 2 связан с каркасом 4 через упругие элементы 9-12, широкие грани которых лежат в плоскостях параллельных оси Z датчика. Соединение 1}щанца 1 с упругими элементами 5-8 выполнено шарнирным в виде цилиндрической двухподвижной кинематической пары, соединение фланца 2 с упругими элементами 9- 12 выполнено также шарннрным, но в В1оде многоугольной, например четырехугольной, двухнодвижной кинематической пары. Сопрягающиеся между собой цилиндрические поверхности отверстий 15-18 фланца 1 и окончаний 19-22 элементов 5-8 выполнены с зазором, обеспечивающим возможность трехкоординатиого перемещения фланца 1 относгительно координатных осей X, у, Z датчика. Поперечные сечении отверстий 15-18 фланца 1 снабжены кольцевыми пазами 23-2Q,B. которые установлены компланарно эла
25
6680 2
стичные амортизаторы 27-30, выполненные , например, из резины в виде шайб, удерживающие фланец 1 в подвешенном состоянии. Величина зазора S между
5 поверхностями отверстий 15-18 и цилиндрических окончаний 19-22 выбирается из условия обеспечения необходимой величины податливости, определяемой погрешностью позициони рования схвата робота, в который встраивается датчик, и определяется сортноюением , где Ь- ширина амортизатора. Из соотношения следует, что глубина коль15 цевых 23-26 должна быть не менее 2/3h. Выбранные значения размеров пазов 23-26 и амортизаторов 27-30 обеспечивают деформацию резиновым амортизаторам 27-30 в преде20 лах, не вызывающих разрушение ма- терисша амортизатора. Сопрягаюшие- ся между собой новеркности отверстий
31-34 фланца 2 и окончаний 35-38 упругих элементов 9-12 выполнены с возможностью перемещения сЪланца 2 только в направлениях продольных осей упругих элементов 9-12. Каркас 3 с упругими элементами 5-8 и каркас. 4 с упругими элементами выполнены раздельными и жестко скреплены между собой по оси сим- метрии датчика. Так как механическая жесткость материала эластичных амортизаторов на два-четыре порядка 35 меньше механической жесткости материала упругих элементов 5-12, то деформация амортизаторов 27-30 на величину & практически не вызывает изменения сигнала па измерило телях 14 деформаций. В качестве измерителей деформаций могут быть фольговые, полупроводниковые и др. тензорезисторы, выводы которых распаяны на плате и собраны в жгут 45 (не показаны), обеспечивающий сопряжение датчшса с внешними устройствами.
Датчик работает следующим образом.
50 . Датчик укрепляют за фланец 1 к месту базирования, например, к руке, робота, а фланец 2 соединяют со схватом робота, к которому прилагаются нагрузки.
55 При действии силы F, направленной по оси Z симметрии датчика, деформируются в одинаковом направлении все упругие элементы 5-8, на
30
измерителях 12 деформации которых появляются сигналы одного знака с одной стороны упругих элементов. 5-8 и другого знака - с другой стороны упругих элементов 5-8. После суммирования сигналов днoгo знака получают искомую величину F-, действующую по оси z симметрии датчика.
При действии силы, направленной по одной из координатных осей в плоскости, перпендикулярной оси Z симметрии датчика, например по оси X, деформируются в одинаковом направлении упругие элементы 9 и 11, на измерителях 14 деформации которы появляются сигналы одного знака с одной стороны упругих элементов 9 и 11. После- суммирования сигналов одного знака получают искомую силу F)(. Аналогично определяется сила Fy
При действии крутящего момента М, относительно оси симметрии датчика деформируются упругие элементы 9-12, причем их однонаправленные грани деформир1 ются в противоположных направлениях. Поэтому величина момента М. определяется суммированием сигналов одного знака с измерителей 14 упругих элементов 9-12.
При действии крутящего момента М деформируются упругие элементы 5 и 7, причем их однонаправленные грани деформируются в противоположных направлениях. Поэтому величина момента М у определяется в результате су1-1мирования сигналов одного знака измерителей 14 упругих элементов 5 и 7 и инверсного суммирования сигналов другого знака. Аналогично определяется крутящий момент My относительно оси у.
Формула изобретения
Силомоментный датчик, содержащий соосно расположенные первый и второй силовоспринимающие фланцы и первый и второй жестко скреплен-, ные между собой по центру каркасы с жестко присоединенными упругШ Ш элементами в виде пластин прямоугольного сечения, продольные оси которых расположены во взаимно перпендику16680
лярных плоскостях, а точки пересечения этих осей лежат на оси симметрии датчика, и измерители деформаций, размещенные на широких гранях
5 упругих элементов, при этом фланцы соед1шены с каркасами через упругие элементы, широкие грани которых лежат в плоскости, перпендикулярной оси симметрни датчика для перво- .
10 го фланца, и в плоскостях параллельных оси симметрии датчика для второго фланца, причем соедине1ше первого фланца с циливдрическими концами упругих элементов выполнено
15 шарнирным в В1оде цилиндр1гческой подвижной кинематической пары, о т
л и ч а ю щ и и с я тем, что, с целью повьшшния точности измерения и возмохшости использования датчика в роботах при сборочных операциях, концы упругих элементов второго каркаса выполнены многогранными, а второй (1шанец снабжен четырьмя одинаковыми отверстиями, расположенными соосно с продольными осями упругих элементов,. соедпненны и1 с вторым каркасом, профиль сечения отверстий второго каркаса геометрически подобен профилю концов упругих элементов, отверстия в первом фланце снабжены кольцевыми пазами, равностоящими от оси симметрии датчика, в которые введены эластичные кольцевые амортизаторы, охватьгаающие цили}одри- ческие концы упругих элементов первого каркаса, при этом диаметры кольцевых пазов и отверстий первого фланца и диаметры цилиндрических концов упругих элементов первого каркаса выбраны из соотношения
(0,8-0,9)(1,I-1,2)DK,
где D, DO диаметры кольцевых пазов и отверстий первого фланца, мм, соответственно;
J)- диаметр цилиндрических концов упругих элементов первого каркаса,мм, причем жесткость упругих элементов в направлении, перпендикулярном широким граням, составляет (10 -Ю) жесткости эластичных амортизаторов в этом же направлении, .
JJ
37
У
| название | год | авторы | номер документа |
|---|---|---|---|
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Силомоментный датчик | 1984 |
|
SU1242734A1 |
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| Силомоментный датчик | 1984 |
|
SU1210072A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| ТЕНЗОДАТЧИК ДЛЯ ОБЪЕМНО-ВЕСОВОГО ИЗМЕРИТЕЛЯ ПЛОТНОСТИ ЖИДКОСТИ И ОБЪЕМНО-ВЕСОВОЙ ИЗМЕРИТЕЛЬ ПЛОТНОСТИ ЖИДКОСТИ НА ЕГО ОСНОВЕ | 2014 |
|
RU2635342C2 |
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| Привод силовой машины | 1989 |
|
SU1632532A1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
Изобретение может быть использовано для силомоментного очувствления роботов различного назначения. Целью изобретения является повышение точности измерения силы и момента и возможности использования датчика в роботах при сборочных операциях. Фланец 1 датчика крепят к руке робота, а фланец 2 соединяют со схватом робота, к которому прилагаются нагрузки. Жестко скрепленные по центру каркасы 3 и 4 соединены с фланцами через упругие элементы, выполненные в виде пластин прямоугольного сечения. Продольные оси пластш расположен{,1 во взаимно перпендикулярных плоскостях, а на их широких гранях размещены измерители 14 информации. Эластичные амортизаторы, установленные компланарно в кольцевых пазах отверстий фланца I, удерживают его в подвешенном состоянии. Во фланце 2 вьпюлнены четыре одинаковых отверстия, расположенные сооспо с продольными осями упругих элементов. При действии силы или крутящего момента будут деформироваться соответствующие упругие элементы, на измерителях деформации появятся сигналы, после суммирования которых определяется требуемая величина. 3 ил. i СП с к h . 1 W l о: о: СХ) о
fS
2,28
17
21
23,27
26,30
25,23
Фиъ. 3
Составитель В.Годзиковский Редактор В.Иванова Техред С.Мигунова
Заказ 996/53 Тираж 778Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал imn Патент, г. Ужгород, ул. Проектная, 4
Корректор Е.Сирохман
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
