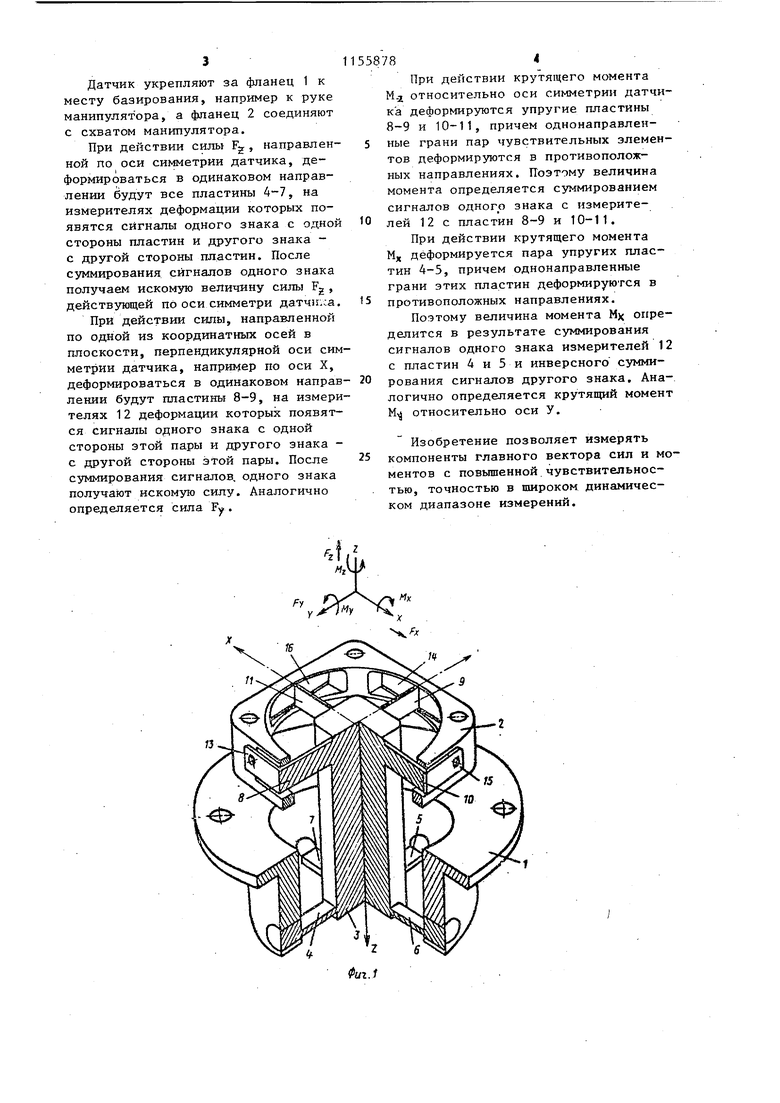
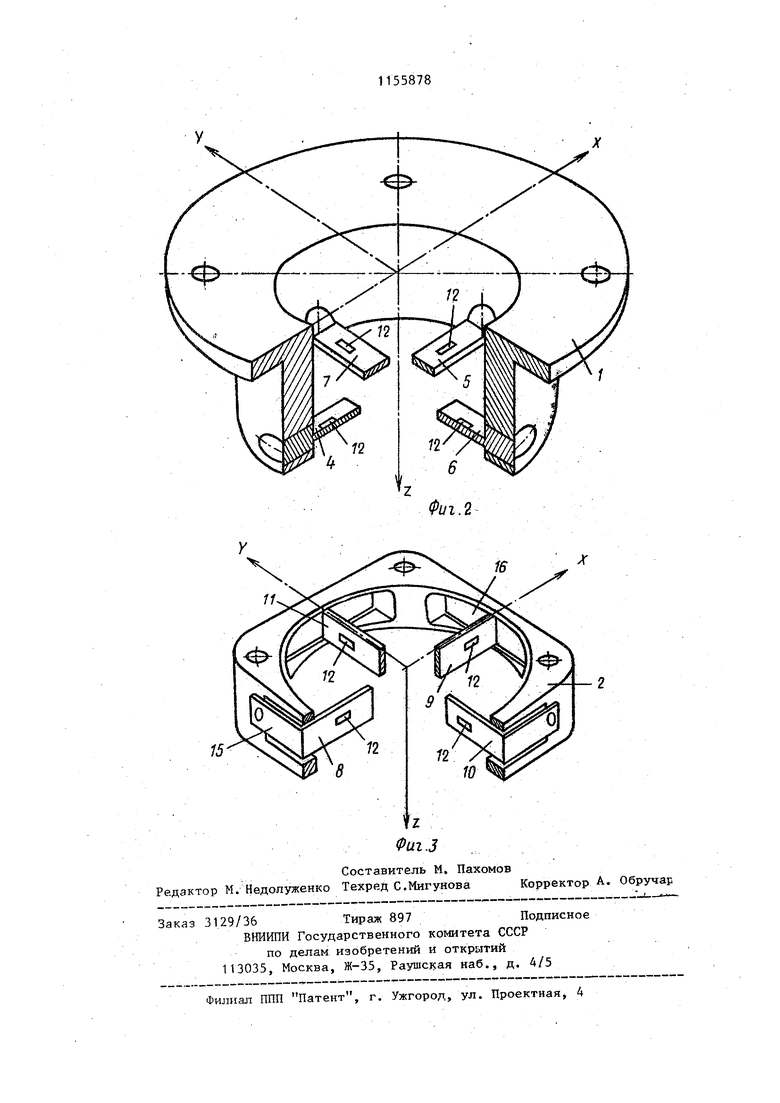
Изобретение относится к силонзмерительной технике, в частности для измерения главного вектора сил и моментов сил, и может быть использовано для очувствления роботовманипуляторов , Известен силомоментньм датчик, содержащий силовоспринимающие фланцы, четыре пары взаимоперпендикулярных продольных и четырех поперечных чувствительных элементов с расположенными на них измерителями деформации |1. Недостатками указанного устройст ва, являются невысокая точность изза взаимного влияния деформируемых чувствительных элементов и ограниченный из-за присоединенных масс динамический диапазон измерения. Наиболее близким по технической сущности к изобретению является сило моментпьш датчик, содержащий первьй второй- с.иловоспринимающие фланцы, центральтшй стержень с жестко присоединенными чувствительными элемен тами в виде пластин, уа широких гранях которых размещены тензорезисторы продольные оси элементов расположены во взаимно перпендикулярных плоскостях, а точки пересечения этих осей лежат на продольной оси датчика, пер вый фланец соединен с центральным стержнем чувствительными элементами широкие грани которых лежат в плоскости перпендикулярной продольной оси датчика, а второй фланец соедине с центральным стержнем элементами, широкие грани которых лежат в плоскостях, параллельных продольной оси датчика С2. Недостатком этого устройства явля ется взаимовлияние деформации чувствительных элементов, которое понижает точность измерения компонентов си и моментов. Целью изобретения является повыше ние точности и расширение динамичес кого диапазона измерения. Указанная цель достигается тем. чтовеиломоментнрм датчике, содержащем первьш и второй силовоспринимающие фланда, центральньй стержень с жестко присоединенными чувствительными элементами .в виде пластин, на широких гранях которых размещены из мерители деформации, продольные оси элe :eнтoв расположены во взаимно перпендикулярных плоскостях, а точк 82 пересечения этих осей лежат на продольной оси датчика, первый фланец соединен с центральным стержнем чувствительными элементами, широкие грани которых лежат в плоскости, перпендикулярной оси датчика, а второй фланец соединен с центральным стержнем элементами, широкие грани которых лежат в плоскостях, параллельных оси датчика, соединение первого фланца .с чувствительными элементс1ми выполнено в виде цилиндрической двухподвижной кинематической пары, а второй фланец соединен с чувствительными элемента1-1и через мембраны, плоскости которых параллельны оси датчика. На фиг. 1 изображена конструки;ия датчика, общий вид; на фиг,- 2 - сое-динение чувствительных пластин с первым фланцем; на фиг. 3 - соединение чувствительных пластин со вторым фланцем. Датчик содержит первый 1 и второй 2 фланцы, соединенные с центральным стержнем 3 посредством крестообразно размещенных двух пар чувствительных элементов в виде пластин 4-5, 6-7, 8-9 и 10-11 с прикрепленными к обоим сторонам (широким граням) пластин измерителями деформации 12. Чувствительные пластины 8-9 и 10-11 соединены с фланцем 2 через мембраны 13-16, выполне шые, например, в Виде удлиненных полос уменьшенного прямоугольного сечения, лежащего в плоскостях, параллельных продольной оси датчика. Соединение, мембран с фланцем и чувствительными элементами выполнено жестким. Плоскости мембран перпендикулярны продольным осям чувствительных элементов. Крестообразные направления пар :чувствительных элементов 4-5, 6-7, ;8-9 и 10-11 лежат в единых взаимно перпендикулярных плоскостях, пересекающихся по оси симметрии датчика. Соединение чувствительных элементов 4-5 и 6-7, расположенных в плоскости, перпендикулярной продольной оси, выполнено в виде цилиндрической двухподвижной кинематической пары с ограниченной возможностью перемещения в плоскости, перпендикулярной продольной оси. Датчик работает следующим образом. Датчик укрепляют за фланец 1 к месту базирования, например к руке манипулятора, а фланец 2 соединяют с схватом манипулятора. При действии силы F, направленной по оси симметрии датчика, деформироваться в одинаковом направлении будут все пластины 4-7, на измерителях деформации которых появятся сигналы одного знака с одной стороны пластин и другого знака - с другой стороны пластин. После суммирования сигналов одного знака получаем искомую величину силы F, действующей по оси симметри датчи:,:а. При действии сипы направленной по одной из координатных осей в плоскости, перпендикулярной оси сим метрии датчика, например по оси X, деформироваться в одинаковом направ лении будут пластины 8-9, на измери телях 12 деформации которых появятся сигналы одного знака с одной стороны этой пары и другого знака с другой стороны этой пары. После суммирования сигналов, одного знака получакзт искомую силу. Аналогично определяется сила Fy. 78 При действии крутящего момента М.д относительно оси симметрии датчика деформируются упругие пластины 8-9 и 10-11, причем однонаправленные грани пар чувствительных элементов деформируются в противоположных направлениях. Поэтому величина момента определяется суммированием сигналов одного знака с измерителей 12 с пластин 8-9 и 10-11. При действии крутящего момента MX деформируется пара упругих пластин 4-5, причем однонаправленные грани этих пластин деформируются в противоположных направлениях. Поэтому величина момента MX определится в результате суммирования сигналов одного знака измерителей 12 с пластин 4 и 5 и инверсного суммирования сигналов другого знака. Аналогично определяется крутящий момент М. относительно оси У. Изобретение позволяет измерять компоненты главного вектора сил и моментов с повышенной чувствительностью, точностью в широком динамическом диапазоне измерений.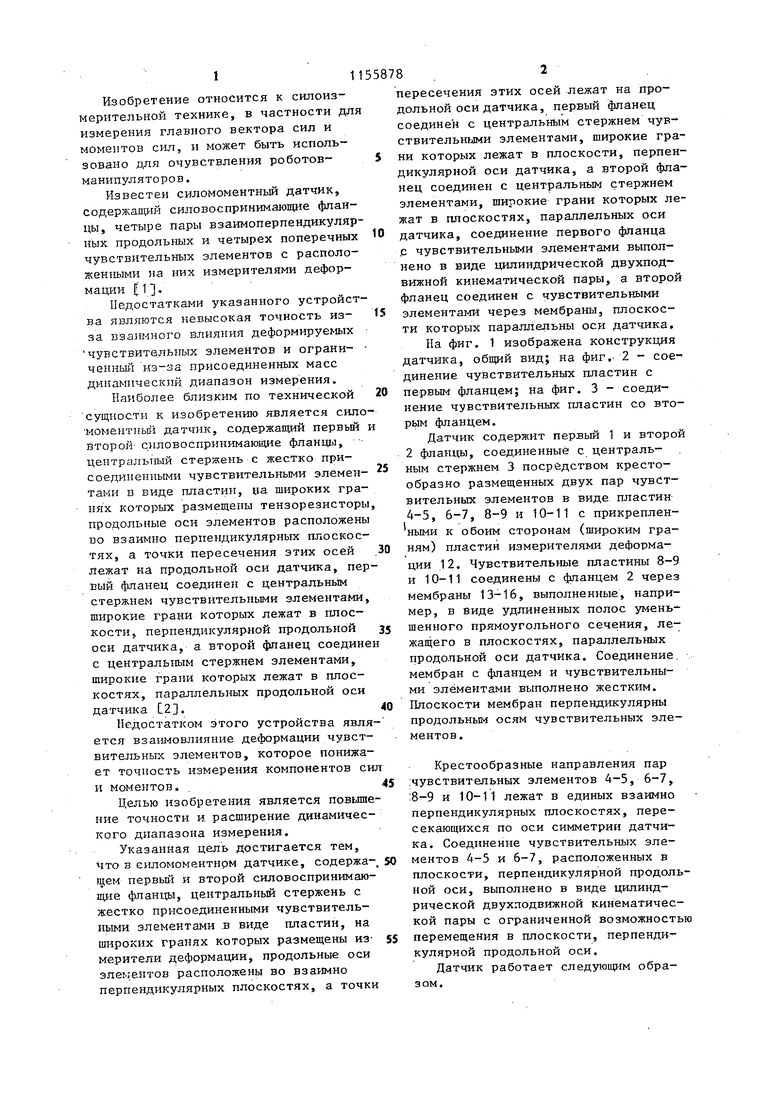
| название | год | авторы | номер документа |
|---|---|---|---|
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| Силомоментный датчик | 1984 |
|
SU1242734A1 |
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| ТЕНЗОДАТЧИК ДЛЯ ОБЪЕМНО-ВЕСОВОГО ИЗМЕРИТЕЛЯ ПЛОТНОСТИ ЖИДКОСТИ И ОБЪЕМНО-ВЕСОВОЙ ИЗМЕРИТЕЛЬ ПЛОТНОСТИ ЖИДКОСТИ НА ЕГО ОСНОВЕ | 2014 |
|
RU2635342C2 |
| ДИНАМОМЕТР ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ НА МОДЕЛИ ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1995 |
|
RU2104505C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАГРУЗОК | 2006 |
|
RU2344385C2 |
| Стенд для измерения нагрузок, воздействующих на объект авиационной техники | 2017 |
|
RU2651627C1 |
| Силомоментный датчик | 1984 |
|
SU1210072A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ | 2005 |
|
RU2308397C2 |
| УСТРОЙСТВО ЛИНЕЙНЫХ ПРЕЦИЗИОННЫХ ПЕРЕМЕЩЕНИЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1990 |
|
RU2017313C1 |
СИЛОМОМЕНТНЫЙ ДАТЧИК, содержащий первый и второй сиповоспринимающие фланцы, центральный стержень с жестко присоединенными чувствительными элементами в виде пластин, на широких гранях которых размещены измерители деформации, продольные оси элементов расположены во взаимно перпендикулярных плоскостях, а точки пересечения этих 1€Егк ; 5у0 осей лежат на продольной оси датчика, первый фланец соединен с центральным стержнем чувствительными элементами, широкие грани которых лежат в плоскости, перпендикулярной оси датчика, а второй фланец соединен с центральным стержнем элементами, широкие грани которых лежат в плоскостях, параллельных оси датчика, отличающийс я тем, что, с целью повышения точности и расширения динамического диапазона измерения за счет уменьшения взаимного влияния внутренних силовых факторов, соединение перво- J го фланца с чувствительными элемен(Л тами выполнено в виде цилиндрической двухподвижной кинематической пары, а второй фланец соединен с чувствительными элементами через мембраны, плоскости которых параллельны оси датчика.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очувствленный кистевой суставМАНипуляТОРА | 1979 |
|
SU795940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
