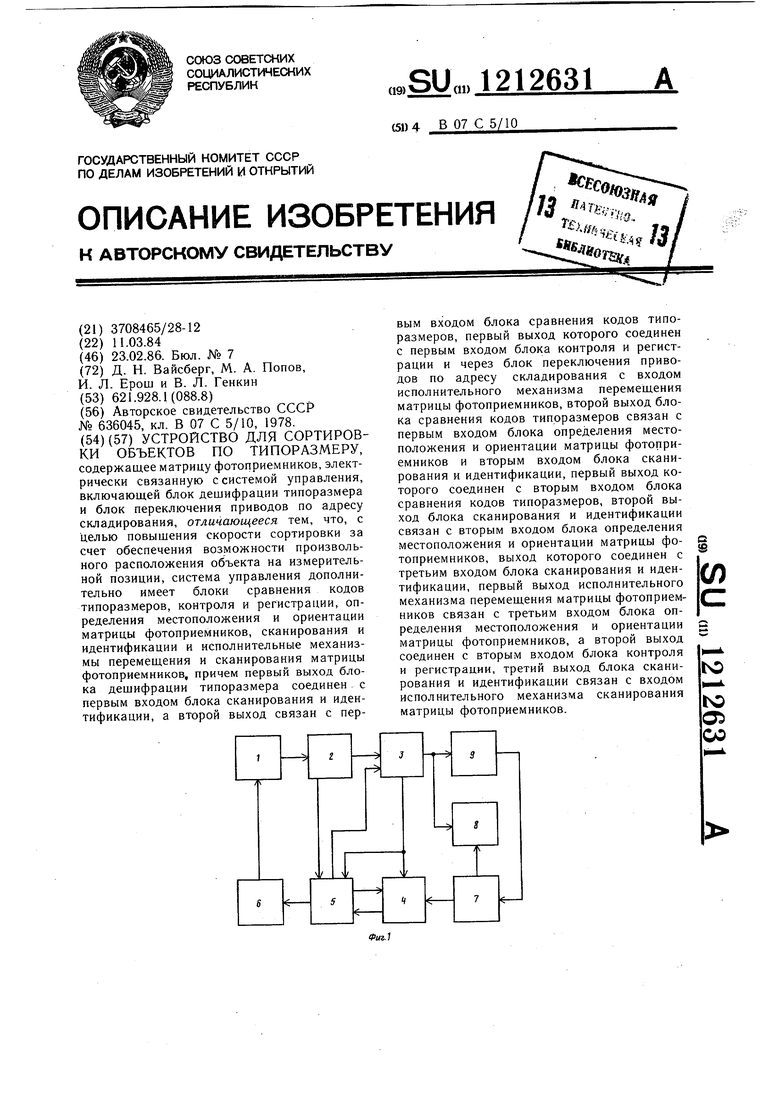
Изобретение относится к устройствам сортировки, конкретнее к устройствам для сортировки объектов по типоразмеру.
Цель изобретения - повышение скорости сортировки за счет возможности произвольного расположения объекта на измерительной позиции.
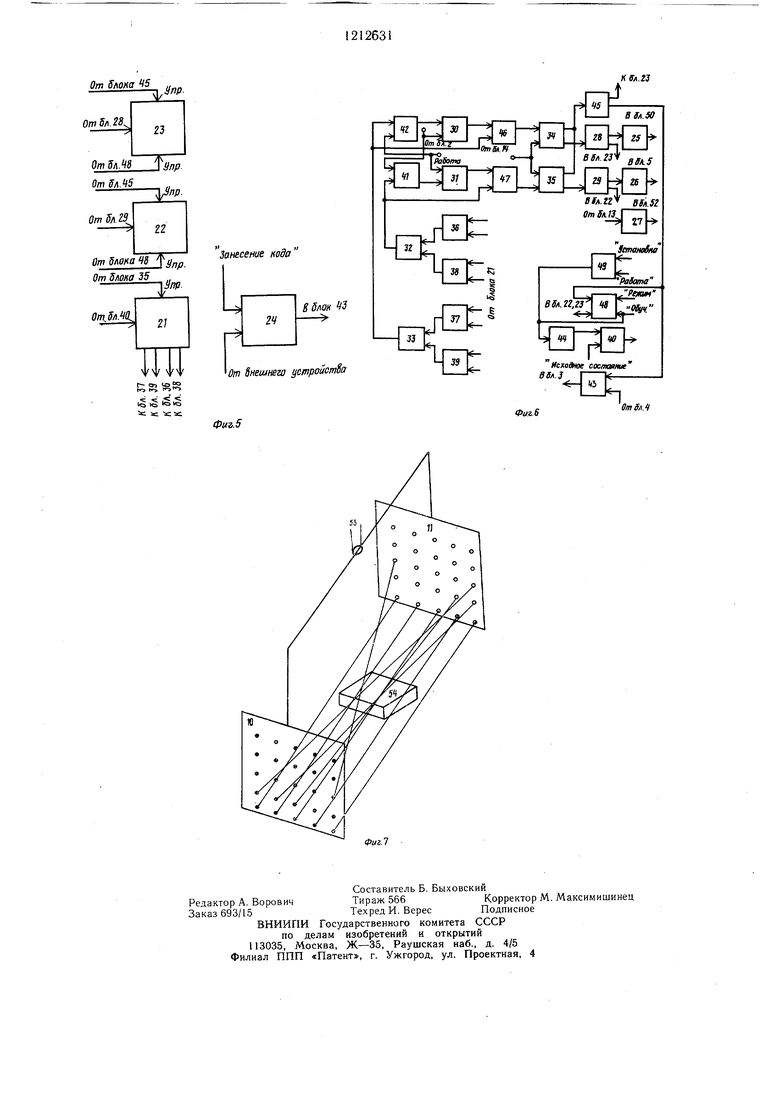
На фиг. 1 изобрагкена структурная схема устройства-; на фиг. 2 - блок осветителей-, и фотоприемников; на фиг. 3 - струк.турная схема блока Дешифрации типоразмера; : на фиг. 4 - структурная схема блока-, сравнения кодов типоразмеров; на фиг. 5 - структурная с-хема блока определения местоположения и ориентации; на фиг. 6 - структурная схема блока сканирования и идентификации; на фиг. 7 - схема установки осветителей и фотоприемников при нахождении центра изображения идентифицируемого объекта.
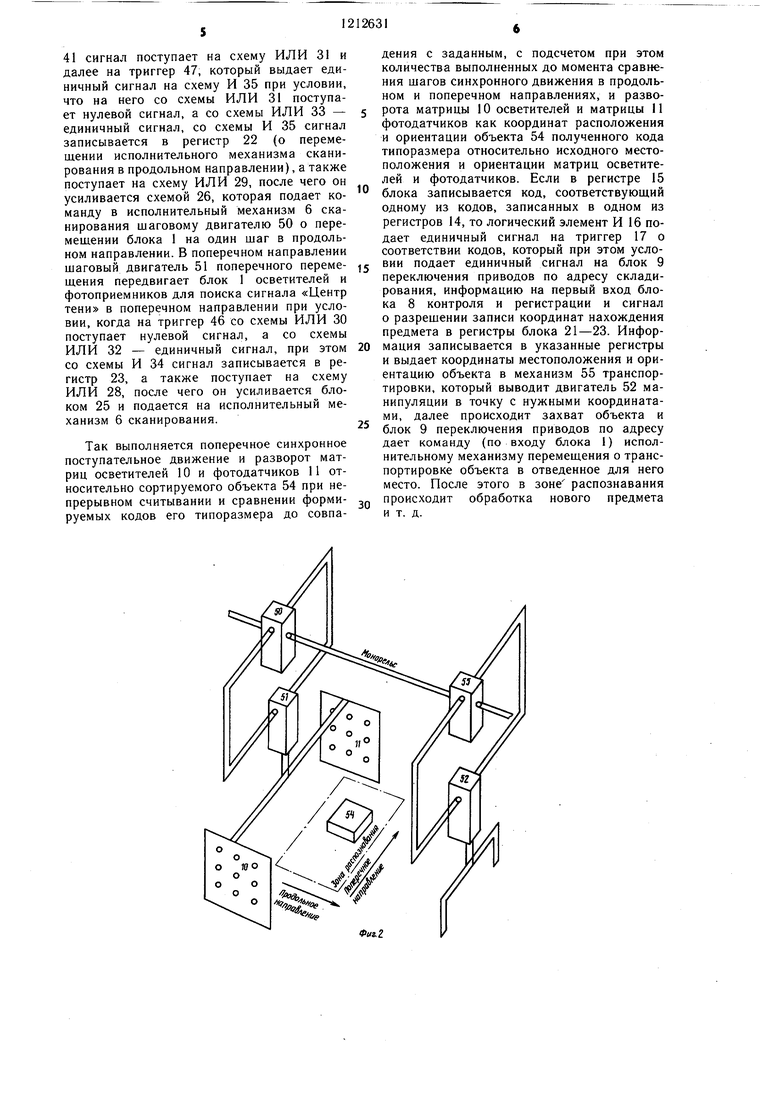
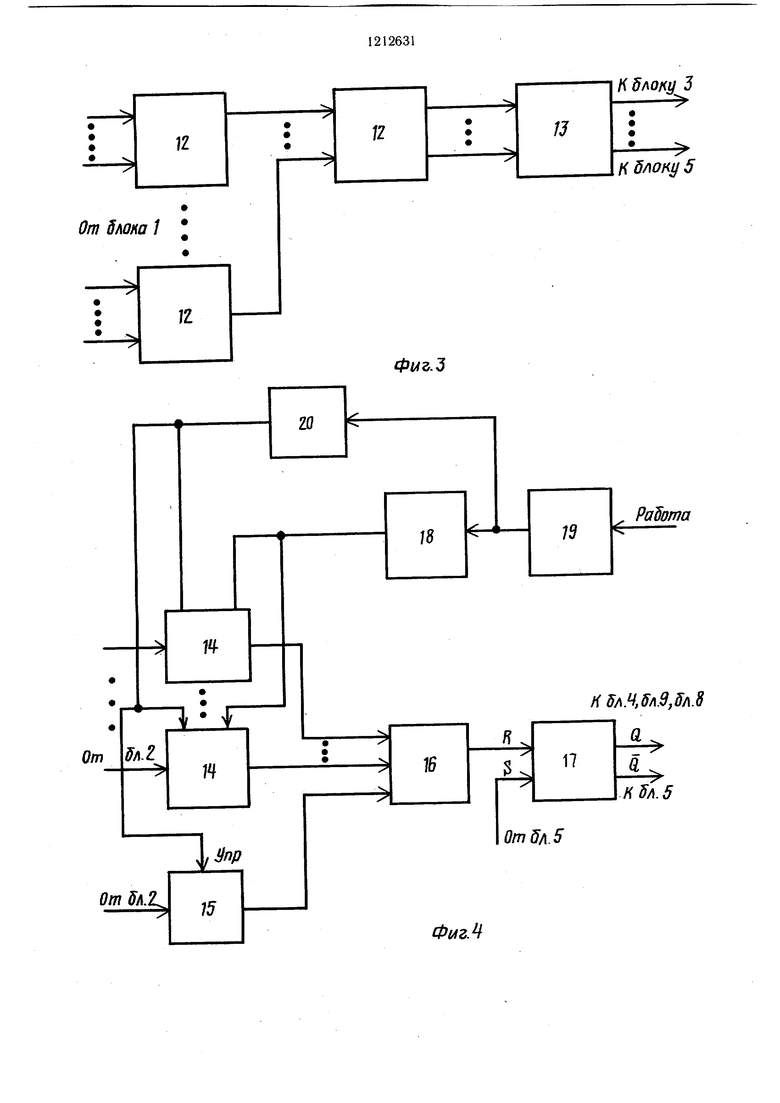
Устройство состоит из блока 1 осветителей и фотоприемников, блока 2 дешифрации типоразмера, блока 3 сравнения кодов типоразмера, блока 4 определения местоположения и ориентации, блока 5 сканирования и идентификации, исполнительных механизмов сканирования 6 и перемещения 7, блока 8 контроля и регистрации и блока 9 переключения приводов по адресу складирования. Блок 1 осветителей и фотоприемников включает матрицу 10 осветителей и матрицу 11 фотоприемников. Блок 2 дешифрации типоразмера включает дешифраторы 12 двоичных кодов изображения и усилитель-формирователь 13 сигналов. Блок 3 сравнения кодов типоразмеров включает регистры 14 записи, регистр 15 считывания, логический элемент И 16, RS-триггер 17, регистр 18, регистр 19 низкой частоты и регистр 20 высокой частоты. Блок 4 определения местоположения и ориентации включает регистр 21 сканирования, регистр 22 поперечного перемещения, регистр 23 продольного перемещения и схему ИЛИ 24. Блок 5 сканирования и идентификации включает усилители-формирователи 25-27, схемы ИЛИ 28-33 и схемы И 34-43, генератор 44, регистр 45 и RS-триггеры 46-49.
Исполнительный механизм 6 сканирования включает шаговый двигатель 50 продольного перемещения, шаговый двигатель 51 поперечного перемещения и двигатель 52 вращения. Исполнительный механизм 7 перемещения включает механизм 53 манипуляции объектом 54 и механизм 55 транспортировки. Параллельно расположенные дешифраторы 12 двоичных кодов изображения подключены к общему дешифратору 12 двоичных кодов изображения, который своими выходами подключен к усилителю-формирователю 13 сигналов, соединенному с блоком 5 сканирования и идентификации, а также с регистрами 14 записи и регистром 15 считывания, подключенному параллельно к логическому элементу И 16.
Регистры 14 записи последовательно соединены с регистром 15, регистром 19 низкой частоты и регистром 20 высокой частоты, а логический элемент И 16 подсое- динен к RS-триггеру 17, который соединен с блоком 4 определения местоположения и ориентации, представляющим собой параллельно расположенные регистры: регистр 23 продольного перемещения, регистр 22 поперечного перемещения, регистр 21 сканирования и схему ИЛИ 24, соединенные с блоком 5 сканирования и идентификации. Последний представляет собой параллельно расположенные схемы И 36 и 38, которые подключены к схеме ИЛИ 32, соединенной
с RS-триггером 47 и схемой И 41, которая соединяется со схемой ИЛИ 30, подключенной этим же входом к блоку 2. Схема И 41 подсоединяется к схеме ИЛИ 31 последовательно соединенными триггером 47, схемой И 35, схемой ИЛИ 29
и усилителем-формирователем 26, подключенным к шаговому двигателю 51 поперечного перемещения.
Параллельно расположенные схемы И 37 и 38 последовательно соединены со схемой ИЛИ 33, схемой И 42, а также схемами ИЛИ 30, RS-триггером 46, схемой И 34, схемой ИЛИ 28 и усилителем-формирователем 25, подключенным к шаговому двигателю 50 продольного перемещения. Схемы И 34 и 35 вторыми входами соединены
с регистром 45, соединенным с триггером 48 и схемой И 43, подключенной к блоку 3. Триггер 48 соединен с RS-триггером 49 и генератором 44, выход которого соединен с входом .схемы И 40, вы- -ход которой подключен к регистру 21 сканирования.
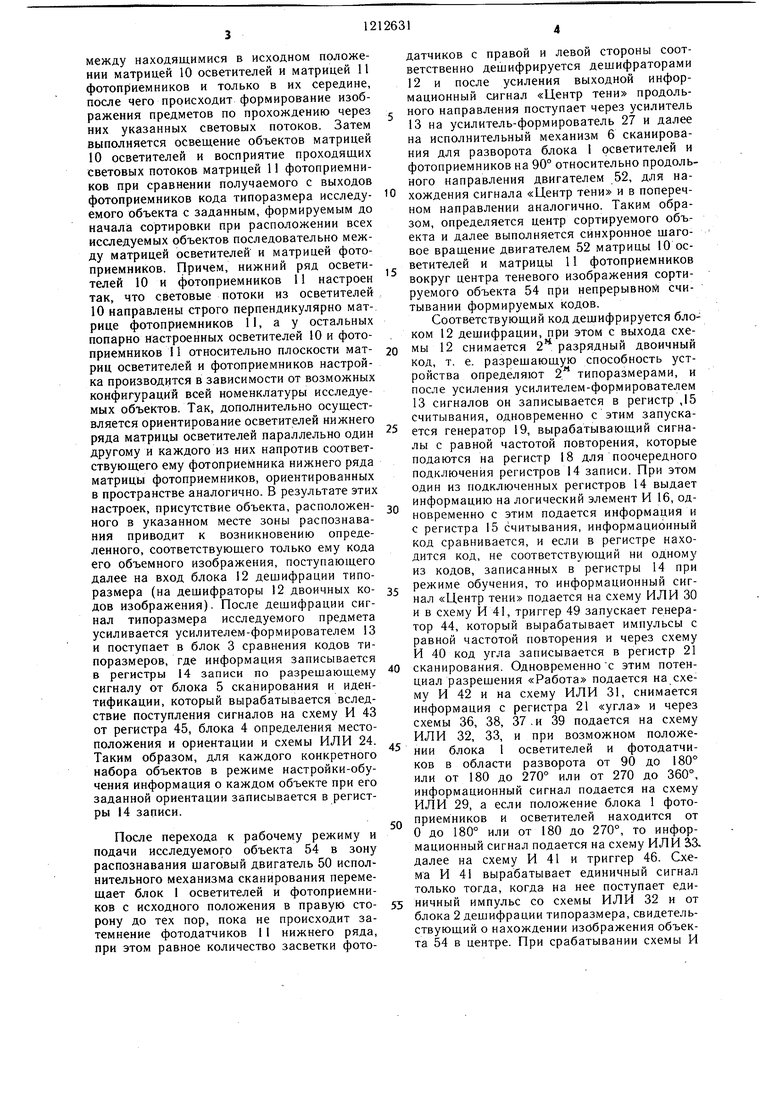
В блоке 1 осветителей и фотоприемников, включающем матрицу 10 осветителей и матрицу 11 фотоприемников, перед выполнением режима обучения производят попарную настройку осветителей и фотоприемНИКОВ матриц осветителей 10 и фотоприемников 11. В результате настройки осветители 10 оказываются оптически связаны с фотоприемниками 11 таким образом, что каждый из фотоприемников, расположенный напротив определенного осветителя, фиксирует прохождение или непрохождение светового потока, направленного данным осветителем в заданную характерную точку исследуемого объекта 54.
Принцип работы устройства основан на
облучении произвольно расположенных объектов световыми потоками, получении их теневого изображения и определении его центра, после совмещения которого с центром матриц и синхронном их развороте формируются двоичные коды изображений и выполняется их последний анализ.
Перед началом эксплуатации в режиме настройки предметы поочередно помещают в зону распознавания на равное расстояние
между находящимися в исходном положении матрицей 10 осветителей и матрицей 11 фотоприемников и только в их середине, после чего происходит формирование изображения предметов по прохождению через них указанных световых потоков. Затем выполняется освещение объектов матрицей 10 осветителей и восприятие проходящих световых потоков матрицей 1 фотоприемников при сравнении получаемого с выходов фотоприемников кода типоразмера исследу- емого объекта с заданным, формируемым до начала сортировки при расположении всех исследуемых объектов последовательно между матрицей осветителей и матрицей фотоприемников. Причем, нижний ряд осветителей 10 и фотоприемников 11 настроен так, что световые потоки из осветителей 10 направлены строго перпендикулярно матрице фотоприемников 11, а у остальных попарно настроенных осветителей 10 и фотоприемников 11 относительно плоскости мат- риц осветителей и фотоприемников настройка производится в зависимости от возможных конфигураций всей номенклатуры исследуемых объектов. Так, дополнительно осуществляется ориентирование осветителей нижнего ряда матрицы осветителей параллельно один другому и каждого из них напротив соответствующего ему фотоприемника нижнего ряда матрицы фотоприемников, ориентированных в пространстве аналогично. В результате этих настроек, присутствие объекта, расположен- ного в указанном месте зоны распознавания приводит к возникновению определенного, соответствующего только ему кода его объемного изображения, поступающего далее на вход блока 12 дешифрации типоразмера (на дещифраторы 12 двоичных ко- дов изображения). После дещифрации сигнал типоразмера исследуемого предмета усиливается усилителем-формирователем 13 и поступает в блок 3 сравнения кодов типоразмеров, где информация записывается в регистры 14 записи по разрешающему сигналу от блока 5 сканирования и идентификации, который вырабатывается вследствие поступления сигналов на схему И 43 от регистра 45, блока 4 определения местоположения и ориентации и схемы ИЛИ 24. Таким образом, для каждого конкретного набора объектов в режиме настройки-обучения информация о каждом объекте при его заданной ориентации записывается в регистры 14 записи.
После перехода к рабочему режиму и подачи исследуемого объекта 54 в зону распознавания щаговый двигатель 50 исполнительного механизма сканирования перемещает блок 1 осветителей и фотоприемников с исходного положения в правую сто- року до тех пор, пока не происходит затемнение фотодатчиков I 1 нижнего ряда, при этом равное количество засветки фотодатчиков с правой и левой стороны соответственно дешифрируется дешифраторами
12и после усиления выходной информационный сигнал «Центр тени продольного направления поступает через усилитель
13на усилитель-формирователь 27 и далее на исполнительный механизм 6 сканирования для разворота блока I осветителей и фотоприемников на 90° относительно продольного направления двигателем 52, для нахождения сигнала «Центр тени и в поперечном направлении аналогично. Таким образом, определяется центр сортируемого объекта и далее выполняется синхронное шаговое вращение двигателем 52 матрицы 10 осветителей и матрицы 11 фотоприемников вокруг центра теневого изображения сортируемого объекта 54 при непрерывном считывании формируемых кодов.
Соответствующий код дешифрируется блоком 12 дещифрации, при этом с выхода схемы 12 снимается разрядный двоичный код, т. е. разрещающую способность устройства определяют 2 типоразмерами, и после усиления усилителем-формирователем 13 сигналов он записывается в регистр ,15 считывания, одновременно с этим запускается генератор 19, вырабатывающий сигналы с равной частотой повторения, которые подаются на регистр 18 для поочередного подключения регистров 14 записи. При этом один из подключенных регистров 14 выдает информацию на логический элемент И 16, одновременно с этим подается информация и с регистра 15 считывания, информационный код сравнивается, и если в регистре находится код, не соответствующий ни одному из кодов, записанных в регистры 14 при режиме обучения, то информационный сигнал «Центр тени подается на схему ИЛИ 30 и в схему И 41, триггер 49 запускает генератор 44, который вырабатывает импульсы с равной частотой повторения и через схему И 40 код угла записывается в регистр 21 сканирования. Одновременно с этим потенциал разрешения «Работа подается на схему И 42 и на схему ИЛИ 31, снимается информация с регистра 21 «угла и через схемы 36, 38, 37.и 39 подается на схему ИЛИ 32, 33, и при возможном положении блока 1 осветителей и фотодатчиков в области разворота от 90 до 180° или от 180 до 270° или от 270 до 360°, информационный сигнал подается на схему ИЛИ 29, а если положение блока 1 фотоприемников и осветителей находится от О до 180° или от 180 до 270°, то информационный сигнал подается на схему ИЛИ S3. далее на схему И 41 и триггер 46. Схема И 41 вырабатывает единичный сигнал только тогда, когда на нее поступает единичный импульс со схемы ИЛИ 32 и от блока 2 дешифрации типоразмера, свидетельствующий о нахождении изображения объекта 54 в центре. При срабатывании схемы И
41 сигнал поступает на схему ИЛИ 31 и далее на триггер 47, который выдает единичный сигнал на схему И 35 при условии, что на него со схемы ИЛИ 31 поступает нулевой сигнал, а со схемы ИЛИ 33 - единичный сигнал, со схемы И 35 сигнал записывается в регистр 22 (о перемещении исполнительного механизма сканирования в продольном направлении), а также поступает на схему ИЛИ 29, после чего он усиливается схемой 26, которая подает команду в исполнительный механизм 6 сканирования шаговому двигателю 50 о перемещении блока 1 на один шаг в продольном направлении.В поперечном направлении шаговый двигатель 51 поперечного переме- шения передвигает блок 1 осветителей и фотоприемников для поиска сигнала «Центр тени в поперечном направлении при условии, когда на триггер 46 со схемы ИЛИ 30 поступает нулевой сигнал, а со схемы ИЛИ 32 - единичный сигнал, при этом со схемы И 34 сигнал записывается в регистр 23, а также поступает на схему ИЛИ 28, после чего он усиливается блоком 25 и подается на исполнительный механизм 6 сканирования.
Так выполняется поперечное синхронное поступательное движение и разворот матриц осветителей 10 и фотодатчиков 11 относительно сортируемого объекта 54 при непрерывном считывании и сравнении форми- руемых кодов его типоразмера до совпадения с заданным, с подсчетом при этом количества выполненных до момента сравнения шагов синхронного движения в продольном и поперечном направлениях, и разворота матрицы 10 осветителей и матрицы 11 фотодатчиков как координат расположения и ориентации объекта 54 полученного кода типоразмера относительно исходного местоположения и ориентации матриц осветителей и фотодатчиков. Если в регистре 15 блока записывается код, соответствующий одному из кодов, записанных в одном из регистров 14, то логический элемент И 16 подает единичный сигнал на триггер 17 о соответствии кодов, который при этом условии подает единичный сигнал на блок 9 переключения приводов по адресу складирования, информацию на первый вход блока 8 контроля и регистрации и сигнал о разрешении записи координат нахождения предмета в регистры блока 21-23. Информация записывается в указанные регистры и выдает координаты местоположения и ориентацию объекта в механизм 55 транспортировки, который выводит двигатель 52 манипуляции в точку с нужными координатами, далее происходит захват объекта и блок 9 переключения приводов по адресу дает команду (по входу блока 1) исполнительному механизму перемещения о транспортировке объекта в отведенное для него место. После этого в зоне распознавания происходит обработка нового предмета и т. д.
Фмг.З
От SAOXa 45
Цпр.
Om5fl.28.
занесение кода
От SA.
гч
S SflOH W
От внешнего ycmpouomSa
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационный видеонакопитель | 1986 |
|
SU1683070A1 |
| Устройство для считывания информации с фотоносителя | 1989 |
|
SU1755297A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЛИНЫ | 1998 |
|
RU2148789C1 |
| Устройство для контроля полупроводниковой структуры | 1987 |
|
SU1422001A1 |
| Устройство для кодирования чертежей печатных плат | 1979 |
|
SU858029A1 |
| Устройство для контроля печатных плат | 1986 |
|
SU1472929A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Устройство управления сортировкой деталей | 1986 |
|
SU1391737A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
ФигЛ
Составитель Б. Быховский
Редактор А. ВоровичТираж 566Корректор М. Максимишинец
Заказ 693/15Техред И. ВересПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Устройство для сортировки деталей на конвейере по типоразмеру | 1977 |
|
SU636045A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
