1
Изобретение относится к области определения механических свойств мап1ин, в частности, к определению жесткости упругих систем и элементов (например, винтовых зажимных механизмов, пружин, мембран и т.д.) и является усоверп1енствованием устройства по авт.св. № 976320.
Целью изобретения является повышение точности измерения.
На чертеже представлено устройство для измерения жесткости упругих систем.
Устройство для измерения жесткости упругих систем включает датчик 1 усилия и измерительную систему, которая состоит из усилителя 2 постоянного тока, порогового элемента 3, источника 4 опорного нап- .ряжения, релейного блока 5, счетчика 6 времени. Пороговый элемент может, например, состоять из операционных усипителей типа К140УД8. Кроме того, устройство включает переключатель 7 и датчик 8 перемещения. Переключатель 7 последовательно соединен с усилителем 2 и параллельно с датчиками 1 и 8 и может доследовательно подсоединять к изме р1 1тельной системе прибора или датчик 8 перемещенияуИпи датчик 1 усилия. При этом датчик 8 должен быть. .согласован с датчиком 1 по уровню выходного сигнала.
Устройство работает следующим образом.
На упругую систему устанавливают датчик 1 усилия и датчик 8 мещений. Переключателем 7 соединяют измерительную систему с датчиком 8, сигнал с которого поступает на усилитель 2. Усиленный сигнал поступает на пороговый элемент 3, насроенный на начальную и конечную величины перемещения или на два заданных предела перемещения. В на- чальньй момент перемещения срабатывает первое реле блока 5, которое включает счетчик 6 времени. При достижении заданной величины перемещения срабатывает второе реле и выключает счетчик 6, по которому определяют время t перемещения. Действительную скорость перемещени упругой системы V определяют отно- гаением измеренных величин перемещения h и его времени t по формуле h
12166942
Затем переключателем 7 соединяют измерительную систему с датчиком 1 усилия и измеряют усилие и время его нарастания. Далее жест- 5 кость упругой системы определяют при равнозамедленном движении по формуле
10
К -
при равномерном по формуле
Vt
где F - прилагаемая нагрузка;
начальная скорость перемещения;
V - достоянная; t - время нарастания усилия.
Так, например, жесткость силового стола УЕ4536 агрегатного станка устройством можно измерить следующим образом. На столе вместо переднего упора устанавливают тензометрический винт (датчик 1 усилия) с выход- ньм сигналом до 10 мВ, перед торцом которого смонтирована протарирован- ная тензобалочка (датчик 8 перемещения) с таким же пределом выходного сигнала до 10 мВ, контактирующая с перемешающейся платформой стола. Тензометрический винт и тензобалочка соединены с измерительной системой экранированным кабелем. Регулируя предохранительную пружинно- фрикционную муфту в кинематической цепи привода рабочего перемещения стола (не показана), .настраивают последний на максимальное усилие
подачи, равное 63 кН. Измеряют скорость рабочей подачи стола, являющуюся начальной скоростью деформации Vg , при помощи тензобалочки. Силовому столу задают рабочий цикл (быстрый
ход вперед - рабочая подача -выдержка 3 - 5 с - быстрый ход назад) ,и измеряют усилие и время его нарастания At, а жесткость стола определяют по формуле
2F
К
V.it
Данное устройство, помимо усилия и времени его нарастания, позволит также измерять скорость перемещения уп- 55 ругой системы, что расширяет область применения. Так как время начала и конца перемещения определяется очень точно (порядка одной тысячной доли
3 1216694
секунды в связи с тем, что пороговыеФормула изобретения
элементы состоят из операционных уси-Устройство для измерения жесткослителей), то с большей точностью оп-ти упругих систем по авт.св. № 976320,
ределяется и величина перемещения,отличающееся тем, что, d
а это дает возможность точно опреде-5 целью повьшения точности измерения,
лить и скорость. Кроме этого, в снабжено датчиком перемещения .
ройстве при помощи датчика переме-и включенным между датчиком усилия
щения можно измерять деформацию уп-и усилителем переключ ателем, друругой системы, что также расширяетгой вход соторого соединен с датчи-
область применения.ком перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения жесткости упругих систем | 1981 |
|
SU976320A1 |
| Способ измерения жесткости упругих систем | 1978 |
|
SU770664A1 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| ЭЛЕКТРОННЫЙ ИЗМЕРИТЕЛЬ И СПОСОБЫ ВЕРИФИКАЦИОННОЙ ДИАГНОСТИКИ РАСХОДОМЕРА | 2018 |
|
RU2766256C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| ДИНАМОМЕТРИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ БОКСА И ДРУГИХ ВИДОВ ЕДИНОБОРСТВ | 1997 |
|
RU2118194C1 |
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |
| Цифровой тензометрический преобразователь на несущей частоте | 2018 |
|
RU2696930C1 |
| Многопредельные автоматические весы | 1986 |
|
SU1381340A1 |
| Устройство для определения статических тяговых характеристик двухзазорного электромагнита | 1977 |
|
SU682878A1 |
Изобретение позволяет повысить точность измерений. Включает датчик усилия 1, измерительную систему и дополнительно переключатель 7 и датчик перемещения 8. Переключатель 7 последовательно соединен с усилителем 2 и параллельно с датчиками 1 и 8. При этом датчик 8 должен быть согласован с датчиком 1 по уровню выходного сигнала. 1 ил. (Л г М ш W 35 35 ;о 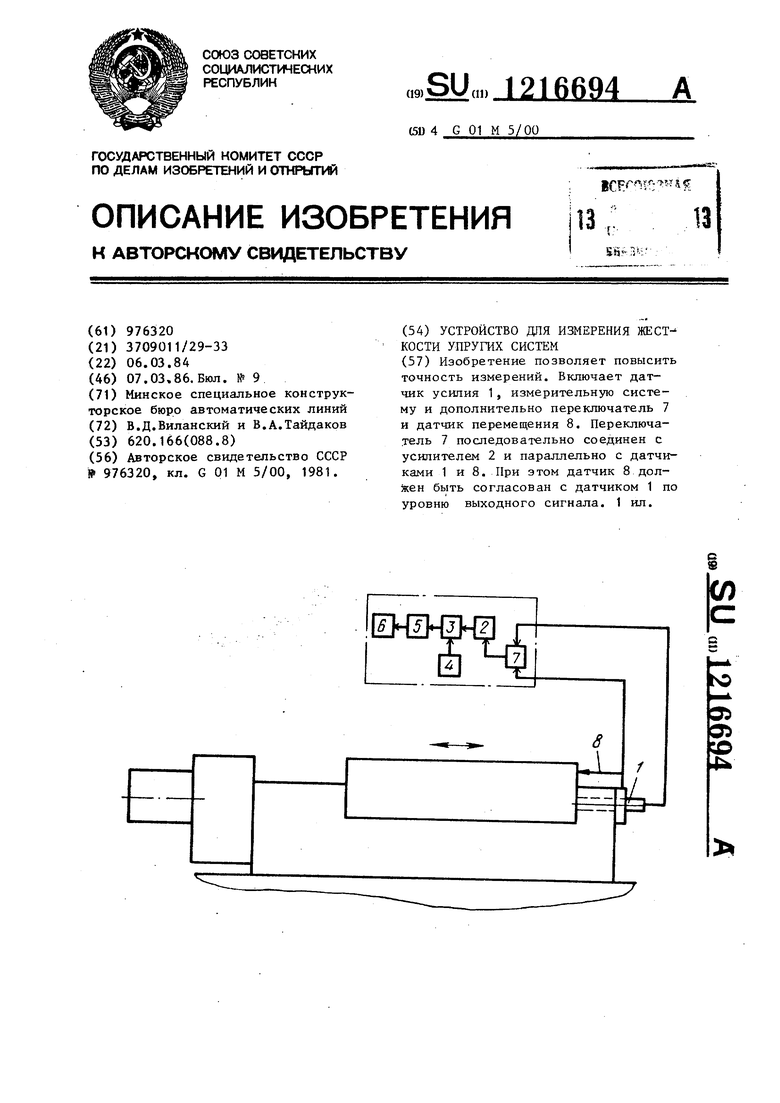
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
