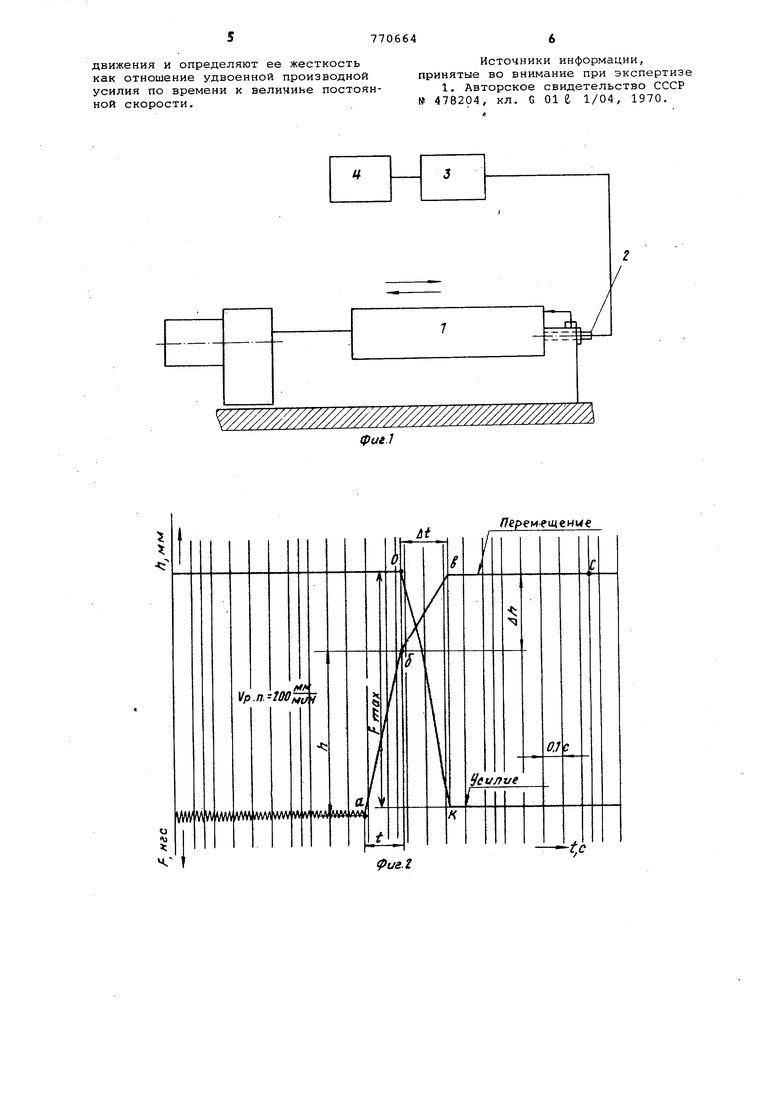
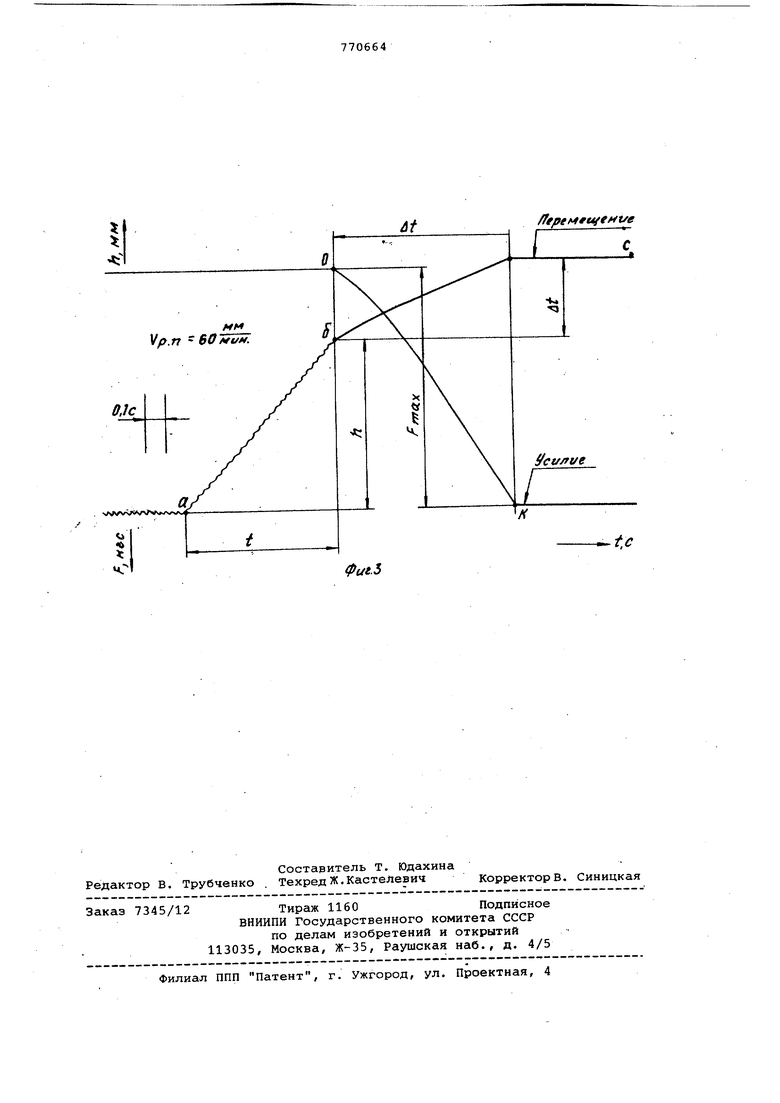
Изобретение относится к определению свойств механических машин, а именно к определению их жесткости. Известен способ измерений жесткое ти упругих систем путем их динамического нагружения с постоянной скоростью и регистрации производной уси лия по времени fl. Недостатком известного динамического способа измерения жесткости является его трудоемкость, так как для его использования требуется наличие специального стеида, например, с эке центриковым нагружающим устройством и сложной специальной контрЬльно-измерительной аппаратурой. Кроме того, область применения из вестного способа ограничивается теми упругими элементами или системами, которые работают в режиме деформации с постоянной скоростью. Использование этого динамического способа для измерения жесткости упругих систем, скорость нагружения которых в процессе эксплуатации является перемен ной, приводит к значительным погреш ностям измерения, так как производная усилия по времени не пропорциональна жесткости. Эти погрешности, свою очередь, уменьшают точность измерения жесткости упругих систем. Целью изобретения является уменьшение трудоемкости и повышение точности измерения жесткости упругих систем, режим работы которых характеризуется переменной скоростью нагружения (деформации) . Цель достигается тем, что по предлагаемому способу измеряют постоянную скорость перемещения системы без нагрузки, нагружают систему па закону равномерно замедленного движения и определяют ее жесткость как отношение удвоенной производной усилия по времени к величине постоянной скорости. На фиг. 1 представлена схема реализации предлагаемого способа для проверки осевой жесткости силового стола металлорежущего (например, агрегатного) станка при помощи обычных универсальных приборов, на фиг. 2 - осциллограмма, полученная для определения жесткости силового стола, скорость рабочей подачи которого 200 мм/мин; на фиг. 3 - то же, но при скорости рабочей подачи стола 60 мм/мин.
На силовом столе 1 вместо винта жесткого упора устанавливают тензометрический винт 2, который является датчиком усилий. Усиленный усилителем 3 сигнал поступает на осц ллограф 4. Регулировкой предохранительной муфты в кинематической цепи привода подачи стола настраивают стол на максимальное пОдачи равное 6300 кгс, определяют, например, при помощи линейки и секундомера на длине 60-100 мм скорость рабочей подачи, которая является начальной скоростью деформации.
После этого включают рабочий цикл стола (быстро вперед - рабочая подача - выдержка на упоре - быстро назад) , при котором нагружают стол по закону равномерно замедленного движения и записывают сигнал от тензометрического винта 2 через тензоусилитель 3 (тип ТА-5) и отметку времени на -осциллографе 4. (тип К-12).
Нагружение стола по закону равномерно замедленного движения обеспечивается тем, что стел настраивают на заданное усилие подачи, которое при подходе стола к жесткому упору воспринимается упругой системой стола с равномерно увеличивающейся силой сопротивления.
В результате этого скорость деформации стола .равномерно уменьшается от начальной до нуля при остановке на жестком упоре.
На осциллограммах обозначены следующие участки: аб-участок перемещения силового стола на рабочей подаче, бв -участок деформации стола, во - положение, при котором стол стоит на жестком упоре, ок - изменение усилия нагружения силового стола до максимального, равного 6300 кгс.
По осциллограмме определяют проГ91.л1
изводную усилия по времени
vat t/
а жесткость стола (к) определяют как отношение удвоенной производной усилия по времени к величине постоянной скорости
ЭР
1 Vo
л F
1 Vo
к 2
2или
TF t
В качестве примера приведем результаты обработки данных, зафиксирванных осциллограммами (см. фиг. 2 и фиг. 3).
Известно, что для равномерно замедленного движения перемещение упругой системы uh под действием силы определяется выражением Vo
дН
At
где Vp - начальная скорость деформации, равная рабочей скорости силового стола; At - время деформации.
В результате обработки осциллограмм получим
для УО 200 мм/мин и At 0,25 с
uh определяется из соотношения д h 2. 5Q-0,25 0,416, что с погрешностью, меньшей 1,5%, соответствует данным осциллограммы (0,41 мм),
для VQ 60 мм/мин и At 0,8 с, u.h определяется из соотношения дЬ
1 60
0,8 0,4, что полностью 2 60
соответствует данным осциллограмки (0,4 мм).
Это подтверждает высокую точность предлагаемого метода измерения жесткости.
В результате последующей математической обработки полученных данных вычисляем жесткость силового стола (например, для Vo 60 мм/мин). лР . 1 6300 1-60
К
60
0,8
At V,
15750 кгс/мм.
При измерении жесткости силового стола, работающего на упоре в режиме равномерно замедленного движения, известным выше способом, получим результат, отличающийся от действительного значения жесткости в два раза.
Таким образом, предлагаемый способ позволяет значительно снизить трудоемкость и повысить точность измерения жесткости упругих сисТем, работающих в режиме нагружения с переменной скоростью. При его реализации исключается потребность в громоздких стендах для нагружения, так как используется рабочий цикл самой нагружаемой системы.
Предлагаемый способ позволяет измерять жесткость упругой системы, например силового стола, без датчика перемещений, что имеет большое практическое значение при производственных испытаниях упругих систем.
Предлагаемым способом можно анализировать влияние скорости рабочей подачи на жесткость силового стола, а также при необходимости контролировать величину перемещения.
Формула изобретения
Способ измерения жесткости упруги систем путем перемещения системы с пстоянной скоростью, последующего ее нагружения до заданного значения усилия и регистрации производной усилия по времени, отличающийся тем, что, с целью снижения трудоемкости и повышения точности измерения жесткости упругих систем, нагружаемы с переменной скоростью, измеряют постоянную скорость перемещения систем без нагрузки, затем нагружают систем по закону равномерно замедленного
движения и определяют ее жесткость как отношение удвоенной производной усилия по времени к величине постоянной скорости.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 478204, кл. G 01 е 1/04, 1970,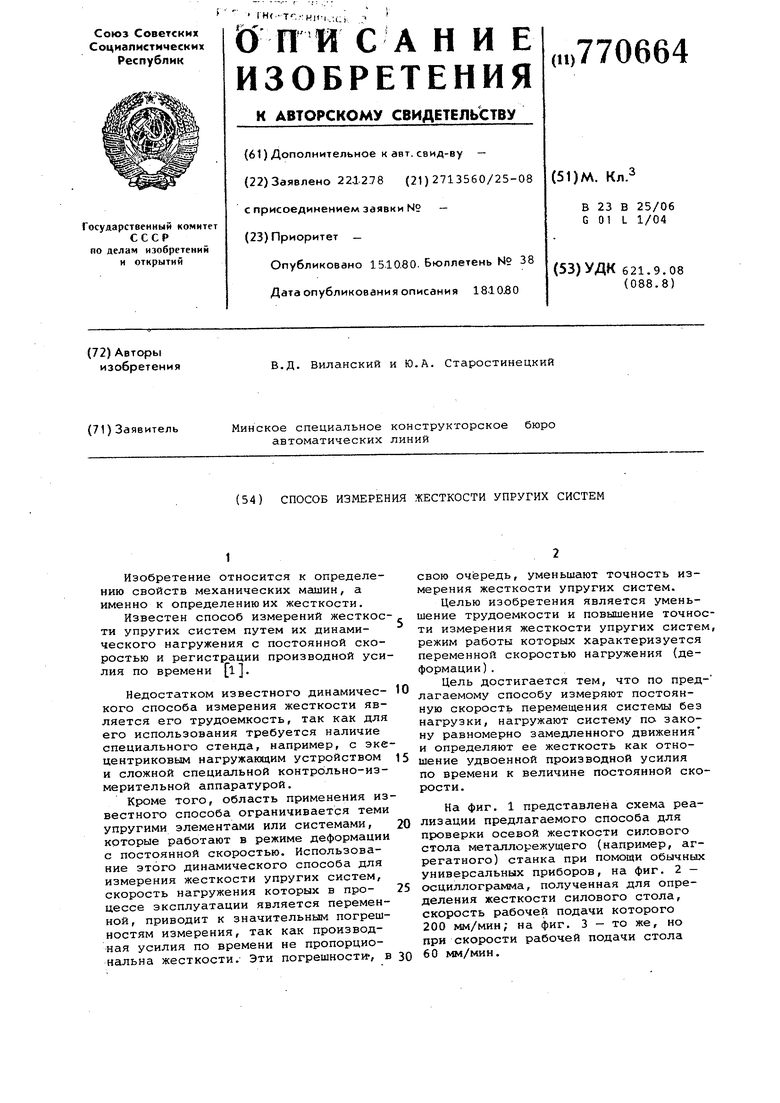

Пере( р.п ЬО MUM. . -
