1
Изобретение относится- к средства неразрушающего контроля, основанных на использовании свойств физических полей, в частности к электронно-сче но-регистрирующим устройствам, устройствам измерения скорости движения и может быть использовано с преимуществом в полупроводящих и водных средах для контроля движущихся объектов живой и неживой природы.
Целью изобретения является расширение функциональных возможностей устройства, путем измерения скорости объектов.
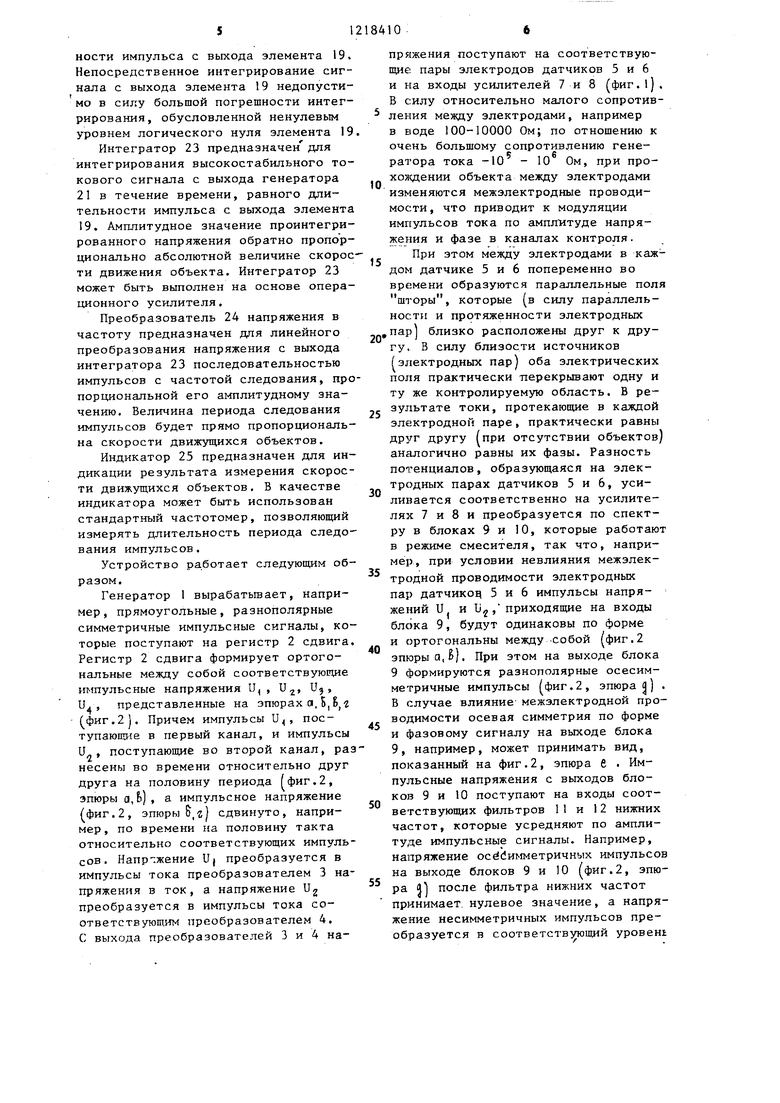
На фиг,1 показана функциональная схема устройства (пунктиром выделены первый и второй каналы контроля ; на фиг,2 и 3 - эпюры напряжений на выходах элементов схемы.
Устройство содержит генератор 1 импульсов, регистр 2 сдвига, первый и второй преобразователи 3 и 4 напряжения в ток, первый и второй датчики 5 и 6, первый и второй усилители 7 и 8, первый и второй блоки 9 и 10 умножения, первый и второй фильтры Пи 12 нижних частот, первый и второй делители 13 и 14 напряжения, первый и второй дифференцирующие элементы 15 и 16, первый и второй компараторы 17 и 18, элемент 19 неравнозначности, регистратор 20, генератор 21 тока, ключ 22, интегратор 23, преобразователь 24 напряжения в частоту, индикатор 25.
Элементы 3,5,7,9,1 1 ,13, 15 и 17 относятся к первому каналу контроля а элементы 4,6,8,10,12,14,16 и 18 - ко второму каналу контроля.
Электроды первого и второго датчиков 5 и 6, вьтолненные в виде проводящих стержней, могут быть одинаковой длины и сгруппированы по парам. Если в верпшнах плоского прямоугольника восстановить перпендикуляры к плоскости, то перпендикулярам соответствует расположение двух пар протяженных электродов в пространстве, причем меньшей стороне прямоугольника соответствует расстояние между парами электродов, которое выбирается из условия менее 20-й части длины объекта. Большая сторона прямоугольника определяет расстояние между электродами в каждой из пар. Это расстояние выбирается, с одной стороны, чтобы между электродами прошел объект, с другой, чтобы выполнялось условие образования квазис4101
татического плоскопараллельного поля между электродами в каждой паре при подаче на них переменного напряжения, расстояние между электродами в
J каждой паре должно быть значительно меньше длины волны сигнала, имеющего наибольшую из частот.
Генератор I служит для создания импульсного напряжения прямоугольO ной формы. Может быть использован стандартный генератор, например, для счета объектов в воде - низкочастотный генератор, либо мультивибратор, выполненный на микросхемах.
5 Нижняя частота импульсного сигнала
генератора должна быть в два-три ра- за выше максимально возможной, радиальной скорости прохождения объектом промежутка между электродами, а верхQ яя частота определяется условиями затухания сигнала в донной среде. На пример, для соленой воды рекомендуются частоты следования импульсов 5-10 кГц при использовании системы
5 Д11Я К9нтроля движущихся рыб.
Регистр 2 сдвига предназначен для обеспечения поочередной выдачи прямоугольных импульсов в первый и второй каналы контроля с первых выходов так, чтобы эти импульсы не перекрывались во время процесса измерения на электродах датчиков 5 и 6. На вторых выходах регистра 2 сдвига формируются импульсы, ортогональные к импульсам первых выходов, т.е.
регистр сдвига обеспечивает формирование четырех ортогональных между собой импульсных сигналов, что позволяет развязать по электрическому полю токов измерительные каналы на парах электродов датчиков 5 и 6 и обеспечить нормальную работу блоков 9 и 10, работающих в аналоговой форме. Ортогональность сигналов может быть получена, например, путем смещения соответствующих импульсов на 1/2 такта.
Преобразователи 3 и 4 напряжения в ток предназначены дня обеспечения большого выходного сопротивления,
0 что обеспечивает повьш1енную чувствительность системы по напряжению к колебаниям нагрузки на электродах датчиков 5 и 6 в соответствующих каналах. Преобразователи 3 и 4 напряже5 ния в ток могут быть выполнены на операционных усилителях.
Пары электродов датчиков 5 и 6 служат для создания в зоне контроля
5
двух квазистатических плоскопараллельных полей на пути прохождения объектов. К каждой паре электродов, лежащих в одной плоскости, можно условно восстановить к плоскости ось симметрии. Оптимальную пространственную ориентацию и расположение электродов можно представить следующим образом. К каждой паре параллельных электродов, лежащих в одной плоскости, можно восстановить перпендикулярно к плоскости ось симметрии. В пространстве оси симметрии обеих пар электродов совпадают и ориентированы по направлению движения объектов, а сами электроды должны быть строго параллельны друг другу также между парами. Такое расположение электродных пар можно определить как установление пар электродов в пространстве параллельно и соосно. В качестве электродов могут быть использованы провода, трубы, протяженные пластины с произвольным изгибом по своей длине.
Усилители 7 и 8 предназначены для усиления сигналов по напряжению, возникающих на электродах датчиков 5 и 6, например, при прохождении объекга между электродами каждой пары.
Блоки 9 и 10 умножения используются для вьщеления информационного сигнала, возникающего в случае изменения импеданса между электродами за счет проходящего объекта.
Фильтры 11 и 12 нижних частот служат для выделения и формирования низкочастотных информационных сигналов. Постоянная времени фильтров выбирается, например, такой, чтобы усреднить величины импульсных напряжений, поступающих с соответствующих выходов перемножителей, т.е. чтобы преобразовать импульсные ин формационные сигналы в непрерывный сигнал. Фильры 11 и 12 нижних частот могут быть, например, фильтрами Чебьшева 6-го порядка с неравномер- ностью в полосе пропускания 3 дБ,
Делители 13 и 14 напряжения предназначены для регулировки амплитуд сигналов в каналах контроля так, например, чтобы сигналы, поступающие с выходов фильтров нижних часто бьти одинаковы по амплитуде в обоих каналах. В качестве делителей 13 и 14 могут быть использованы неинвертирующие усилители с регулируемым
коэффициентом усиления либо стандартные резисторные потенциометры. Дифференцирующие элементы 15 и 16 формируют сигналы, представляющие собой производную от функции изменения проводимости между парами электродов датчиков 5 и 6, Выбором постоянной времени дифференцирования можно добиться значительного ослабления помеховых сигналов с верхней граничной частотой 0,1 Гц, обусловленных случайными флуктуациями проводимости среды. Постоянная времени дифференцирующих элементов долж5 на быть порядка времени прохождения объекта между парами электродов датчиков 5 и 6. В качестве дифференцирующих элементов 15 и 16 могут быть использованы дифференциаторы
Q на базе операционного усилителя.
Компараторы 17 и 18 предназначены для формирования сигнала постоянной амплитуды, знак которого определяется знаком фазы продифференци5 рованного низкочастотного информационного сигнала.
Элемент 19 неравнозначности формирует сигнал постоянной амплитуды, длительность которого равна временной задержке низкочастотного информационного сигнала одного измерительного канала по отнощению к сигналу второго канала. Временная задержка представляет собой время прохождения движущимся объектом фиксирован5 ного расстояния между датчиками 5 и 6, поэтому скорость объекта будет обратно пропорциональна временной задержке, т.е. элемент 19 формирует импульс прямоугольной формы, длитель0 ность которого обратно пропорциональна скорости движения объекта.
Регистратор 20 предназначен для индикации результата счета импульсов, поступающих с выхода элемента 19. В
5 качестве регистратора может быть использован стандартный прибор, позволяющий осуществлять счет импульсов положительной и отрицательной полярности.
0 Генератор 21 тока предназначен для стабилизации тока заряда.емкости интегратора 23, что приводит к увеличению точности интегрирования. Генератор 21 может быть выполнен
5 на базе операционного усилителя.
Ключ 22 служит для подачи сигнала генератора тока на вход интегратора 23 на время, равное дпитель0
ности импульса с выхода элемента 19. Непосредственное интегрирование сигнала с выхода элемента 19 недопустимо в силу большой погрешности интегрирования, обусловленной ненулевым уровнем логического нуля элемента 19
Интегратор 23 предназначен для интегрирования высокостабильного токового сигнала с выхода генератора 21 в течение времени, равного длительности импульса с выхода элемента 19, Амплитудное значение проинтегрированного напряжения обратно пропорционально абсолютной величине скорости движения объекта. Интегратор 23 может быть выполнен на основе операционного усилителя.
Преобразователь 24 напряжения в частоту предназначен для линейного преобразования напряжения с выхода интегратора 23 последовательностью импульсов с частотой следования, пропорциональной его амплитудному значению. Величина периода следования импульсов будет прямо пропорциональна скорости движущихся объектов.
Индикатор 25 предназначен для индикации результата измерения скорости движущихся объектов. В качестве индикатора может быть использован стандартный частотомер, позволяющий измерять длительность периода следования импульсов.
Устройство работает следующим образом.
Генератор 1 вырабатьтает, например, прямоугольные, разнополярные симметричные импульсные сигналы, которые поступают на регистр 2 сдвига. Регистр 2 сдвига формирует ортогональные между собой соответствующие импульсные напряжения U, , U Uj, Uj , представленные на эпюрах а, S В, г (фиг,2). Причем импульсы U, поступающие в первый канал, и импульсы U-, поступающие во второй канал, раз несены во времени относительно друг друга на половину периода (фиг,2, эпюры а,Ь), а импульсное напряжение фиг.2 , эпюры &, г) сдвинуто, например , по времени на половину такта относительно соответствующих импульсов. Напряжение U( преобразуется в импульсы тока преобразователем 3 напряжения в ток, а напряжение Ug преобразуется в импульсы тока соответствующим преобразователем 4, С выхода преобразователей 3 и 4 на10
пряжения поступают на соответствующие пары электродов датчиков 5 и 6 и на входы усилителей 7 и 8 (фиг.1). В силу относительно малого сопротивления между электродами, например в воде 100-10000 Ом; по отношению к очень большому сопротивлению генератора тока -10 - 10 Ом, при про- хояодении объекта между электродами
15
0
изменяются межэлектродные проводимости, что приводит к модуляции импульсов тока по амплитуде напряжения и фазе в каналах контроля.
При этом между электродами в каждом датчике 5 и 6 попеременно во времени образуются параллельные поля шторы, которые (в силу параллельности и протяженности электродных ,пар близко расположены друг к другу, В силу близости источников fэлектродных пар) оба электрических поля практически перекрывают одну и ту же контролируемую область. В ре- зультате токи, протекающие в каждой электродной паре, практически равны друг другу (при отсутствии объектов) аналогично равны их фазы. Разность потенциалов, образующаяся на электродных парах датчиков 5 и 6, усиливается соответственно на усилителях 7 и 8 и преобразуется по спектру в блоках 9 и 10, которые работают в режиме смесителя, так что, например, при условии невлияния межэлектродной проводимости электродных пар датчикоц 5 и 6 импульсы напряжений и и и, приходящие на входы блсжа 9, будут одинаковы по форме и ортогональны между-собой (фиг.2 эпюры а, 6). При этом на выходе блока 9 формируются разнополярные осесим- метричные импульсы фиг.2, эпюра ) . В случае влияние межэлектродной проводимости осевая симметрия по форме и фазовому сигналу на выходе блока 9, например, может принимать вид, показанный на фиг.2, эпюра 6 . Импульсные напряжения с выходов блоков 9 и 10 поступают на входы соответствующих фильтров 11 и 12 нижних частот, которые усредняют по амплитуде импульсные сигналы. Например, напряжение ocёdиммeтpичныx импульсов на выходе блоков 9 и 10 (фиг.2, эпюра ч после фильтра нижних частот принимает, нулевое значение, а напряжение несимметричных импульсов преобразуется в соответствующий уровень
5
7
постоянного напряжения /фиг.2, эшо- ра ж) .
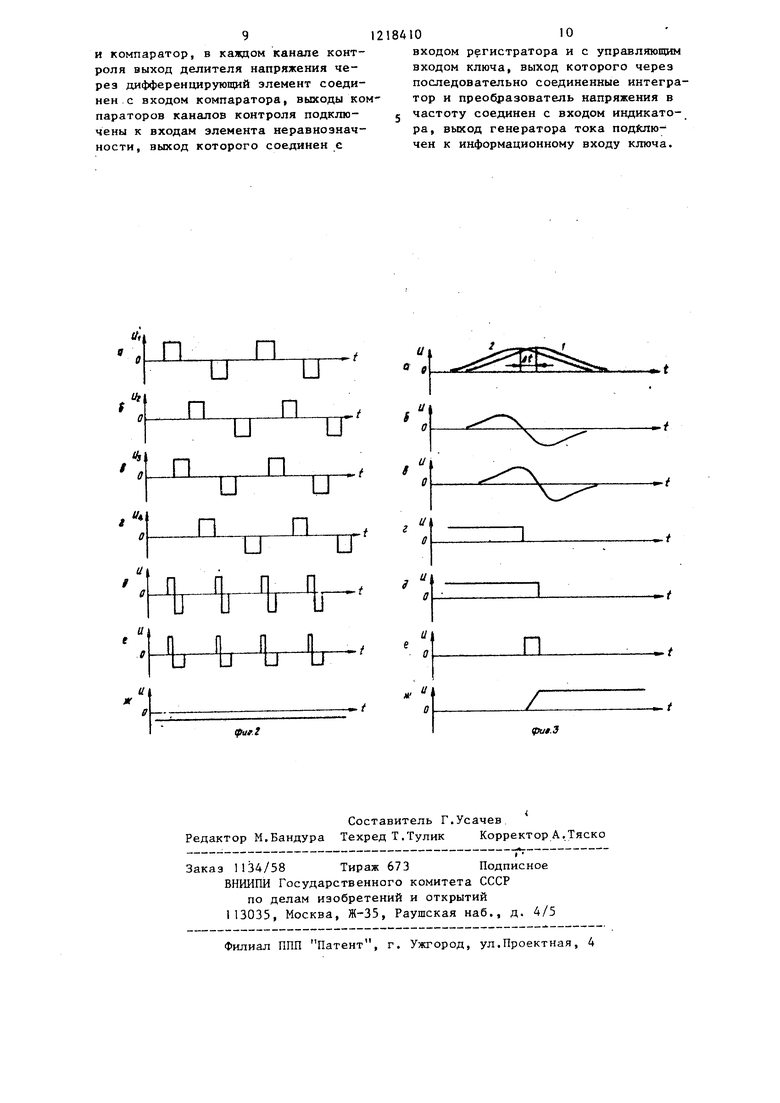
При nocneflOBarejibHOM прохождении например, электроприводящим объектом плоскопараллельных полей меящу электродами в каждом датчике (направление движения объекта показано стрелкой на фиг.I) амплитуды и фазы напряжений соответствующих электродных пар будут изменяться. В соответствии с изменением сигналов на электродах на выходах соответствующих измерительных каналов, рассредоточенных в пространстве на некоторое фиксированное расстояние и х, формируются сигналы об объектах. На эпюре q фиг.З показаны сигналы, пропорциональные изменению напряжений сперва на паре электродов датчика 6 /кривая 2) и затем на паре электродов датчика 5 (кривая 1). Очевидно, что временная задержка ftt изменения проводимос ти в одном канале по отношению к изменению проводимости в другом канапе будет зависеть от скорости объекта V следующим образом.
it
Лх
)
АХ
таким образом V
)it
, где Л x const
и Vrt- -т-, т.е. скорость объекта обрат I
но пропорциональна временной задержке ь t информационных сигналов между каналами. Временную задержку и t (фиг.З, эпюра q проще всего определить между максимальньми значениями информационных сигналов, что и реализуется в данном устройстве. Дифференцирующие элементы 15 и 16 и компараторы 17 и 18 позволяют определить точное положение максимумов информационных сигналов в каждом канале по моменту прохождения производной информационного сигнала че- рез нулевое значение (фиг.З, эпюры Sifej-Z, Q) . Длительность импульса с выхода элемента 19 равна временной задержке & t (фиг.3, эпюра 6 ) между максимумами информационных сигналов каналов и обратно пропорциональна скорости движения объекта. Прецизионное интегрирование сигнала постоянной -амплитуды длительностью it достигается применением генератора 21 тока, ключа 22, интеграто- ра 23. Ключ 22 на время At подключает выход генератора 21 тока к входу интегратора 23. Амплитуда сигна10
ла на выходе интегратора обратно пропорциональна скорости движения объекта, причем без учета направления его движения и его относительной электропроводности, т.е. обратно пропорциональна абсолютной величине скорости движения (фиг.З, эпюра ж). Для установления прямо пропорциональной зависимости между скоростью движения V и соответствующему ей регистрируемому параметру предназначен преобразователь 24 напряжения в частоту. В качестве такого параметра служит длительность
периода генерируемых выходных импульсов преобразователя 24, длительность периода которых пропорциональна скорости движения объекта. Изменяя частотный диапазон генерируемых импульсов с помощью частотно-задающих элементов в преобразователе 24 можно установить взаимооднозначное соответствие между скоростью движущихся объектов и длительностью периода следования выходных импульсов. Величина скорости движения объекта, т.е. величина длительности периода импульсов с выхода преобразователя 24 индицируется на индикаторе 25, а счет объектов осуществляется регистратором 20.
Формула изобретения
Устройство для счета движущихся объектов, содержащее генератор импульсов, выход которого соединен с входом регистра сдвига, регистратор первый и второй каналы контроля,
каждый из которых выполнен из последовательно соединенных преобразователя напряжения в ток, датчика, усилителя, блока умножения, фильтра нижних частот и делителя напряжения, первые выходы регистра сдвига соединены с входами преобразователей напряжения в ток каналов контроля, вторые выходы регистра сдвига подключены к вторым входам блоков ум- :ножения каналов контроля, о т л к -
чающееся тем, что, с целью
расщирения функциональных врзможностей устройства путем измерения
скорости объектов, в него введены
генератор тока, ключ, интегратор,
преобразователь напряжения в частоту, индикатор и элемент неравнозначности, в каждый канал контроля введены дифференцирующий элемент
91
и компаратор, в калздом канапе контроля выход делителя напряжения через дифференцирующий элемент соединен с входом компаратора, выходы ком параторов каналов контроля подключены к входам элемента неравнозначности, выход которого соединен с
21841010
входом регистратора и с управляющим входом ключа, выход которого через последовательно соединенные интегратор и преобразователь напряжения в 5 частоту соединен с входом индикатора, выход генератора тока подключен к информационному входу ключа.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета движущихся объектов | 1985 |
|
SU1305740A1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Электроконтактный дефектоскоп для контроля проводящих сред | 1983 |
|
SU1165966A1 |
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| Адаптивное устройство обнаружения и аналого-дискретного преобразования сигналов | 2018 |
|
RU2684643C1 |
| Акселерометр | 2017 |
|
RU2653140C1 |
| Корреляционный измеритель скорости | 1984 |
|
SU1163271A1 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2042922C1 |
| Способ широтно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой частоты коммутации | 2017 |
|
RU2661495C1 |
Изобретение относится к сред- ствам учета объектов, движущихся в полупроводящих и водных средах. Устройство помимо подсчета числа объектов обеспечивает измерение скорости их движения в зоне контроля датчиков 5 и 6. Датчики выполнены в виде системы электродов и управляются импульсами, поступаюгцими с генератора 1 импульсов через регистр 2 сдвига и преобразователи 3 и 4 напряжения в ток. Обработка сигналов с датчиков обеспечивается двумя каналами контроля. Каждый канал выполнен из последовательно соединенных усилителя, блока умножения, фильтра низких частот, делителя напряжения, дифференцирующего элемента и компаратора. Несовпадение выходных импульсов каналов контроля отражает нали- чие предмета в зоне контроля датчиков . Элемент 19 неравнозначности формирует импульс длительностью, равной времени прохождения; объектом за- . данного отрезка пути. Указанное время формируется путем интегрирования сигнала с генератора 21 тока через ключ 22 в интеграторе 23. Преобразование времени движения в скорость осуществляется преобразователем 24 напряжения в частоту. Полученное значение скорости отражается индикатором 25. 3 ил. I (Л с ю 00 4
| Устройство для счета движущихся объектов | 1981 |
|
SU1040498A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
