Изобретение относится к средствам неразрушающего контроля, основанным на использовании свойств физических полей, в частности к электрон- носчетнорегистрирующим устройствам, устройствам определения направления движения и местоположения, и может быть использовано с преимуществом в полупроводящих и водных средах для KOHTpojfH движущихся объектов живой и неживой природы.
Целью изобретения является расширение функциональных возможностей устройства путем обеспечения возможности определения местоположения объекта в зоне контроля.
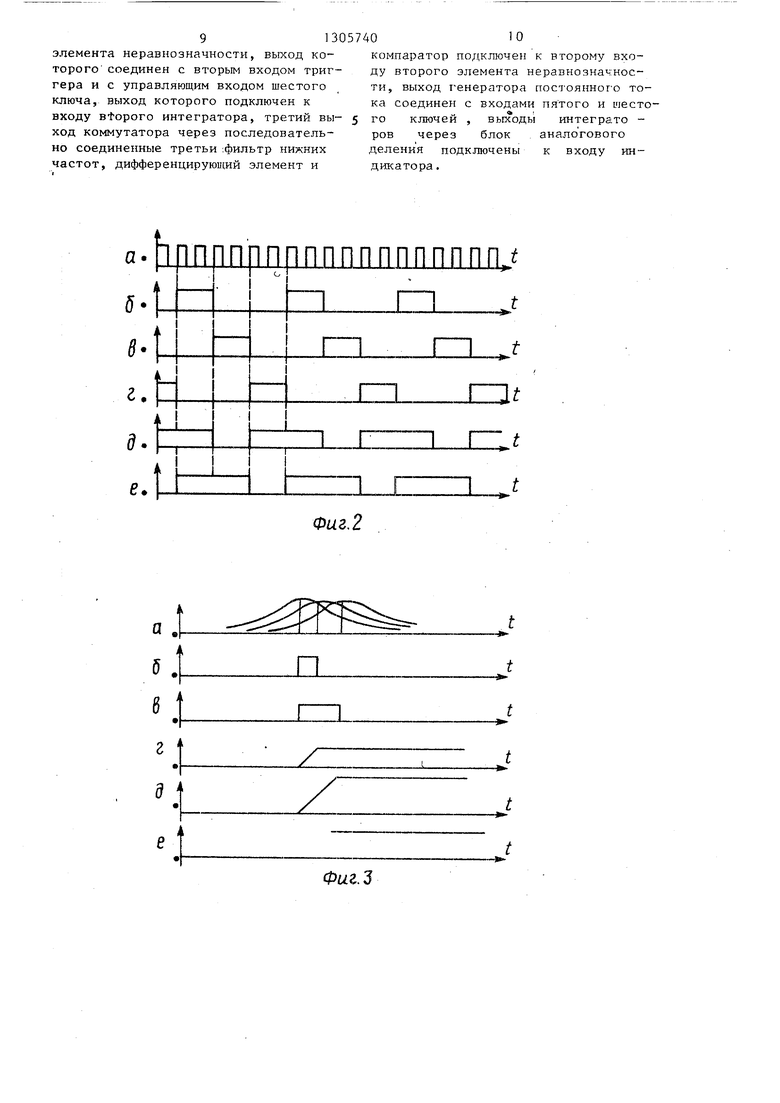
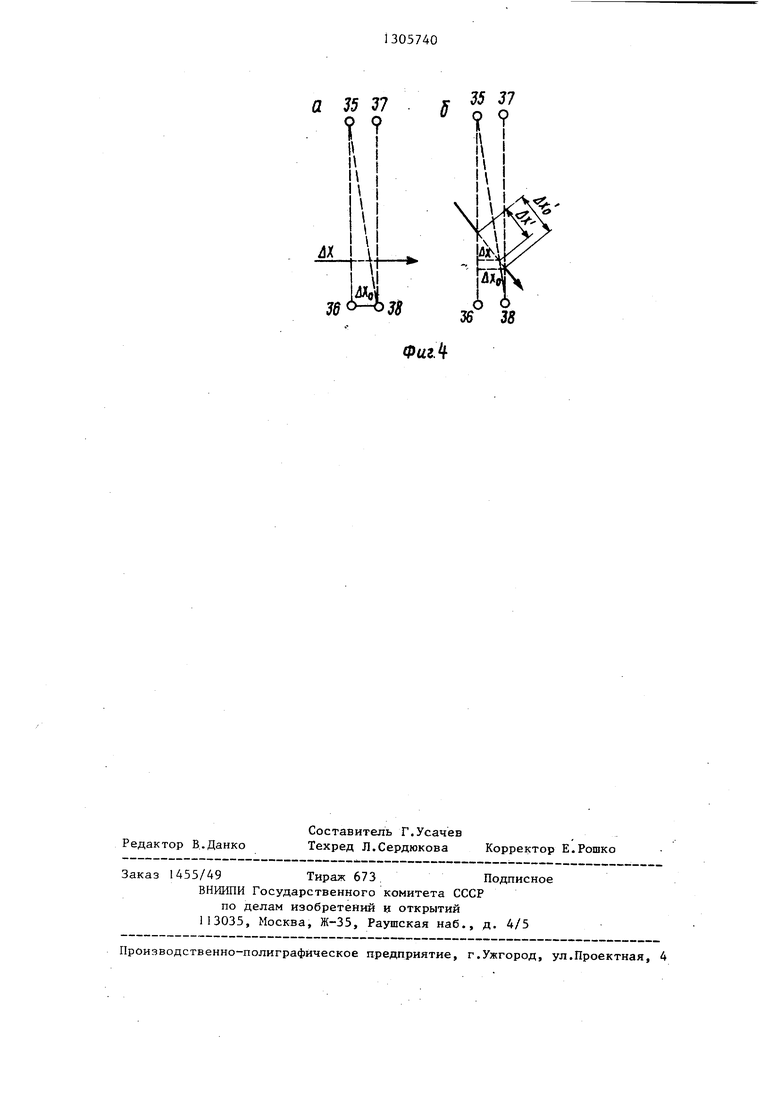
На фиг.1 представлена структурная схема устройства для учета движущих ся объектов; на фиг.2 и 3 - эпюры напряжения устройства; на фиг.4 - электродная система датчиков с объектом.
Устройство содержит генератор 1 переменного напряжения, преобразователь 2 напряжения в ток, формирователь 3 импульсов, делитель 4 частоты, регистр 5 сдвига, первый ключ 6, первый электродный датчик 7, третий и второй ключи 8 и 9, второй электроный датчик 10, четвертый ключ 11, амплитудный селектор 12, коммутатор 13, первьй, второй и третий фильтры нижних частот 14-16, первьй, второй и третий дифференцирующие элементы 17-19, первый, второй и третий компараторы 20-22, первый и второй элементы 23 и 24 неравнозначности, элемент 25 задержки, пятый и шестой ключи 26 и 27, генератор 28 постоянного тока, триггер 29, первьй и второй интеграторы 30 и 31, регистратор 32,, блок 33 аналогового деления, индикатор 34 .
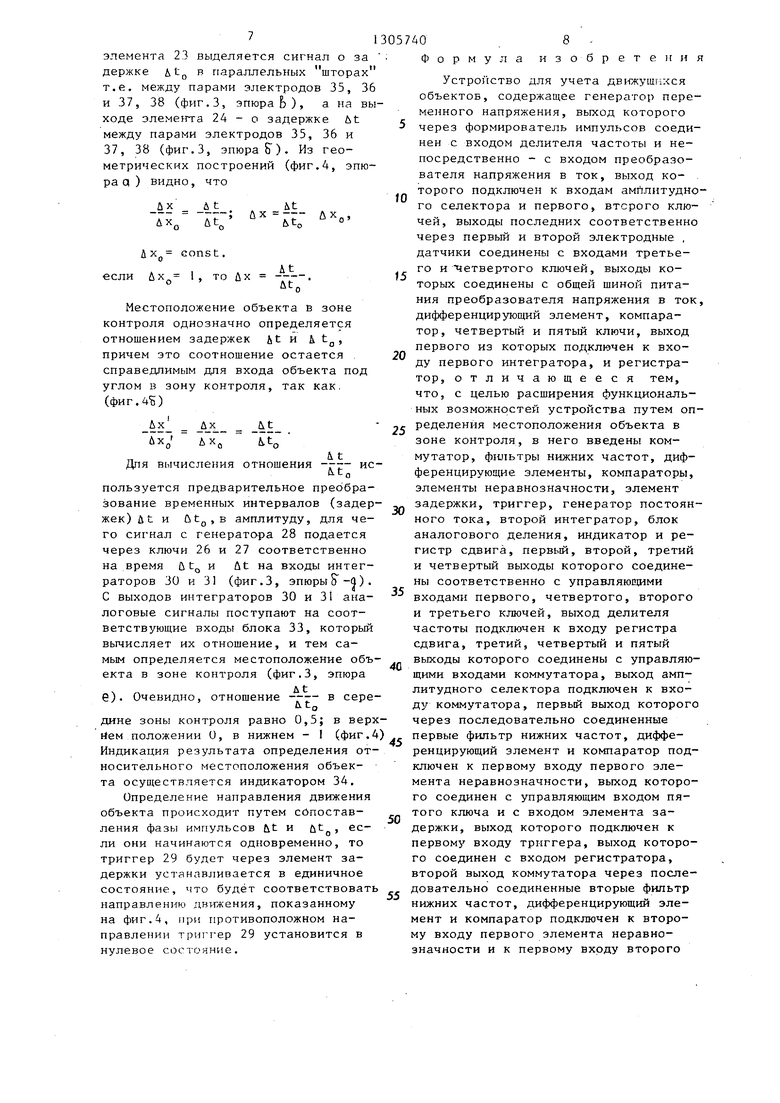
Па фиг.4 изображено расположение электродов 35 и 36 датчика 7 и электродов 37 и 38 датчика 10.
Электроды первого и второго датчиков 7 и 10, выполненные в виде проводящих стержней, могут быть одинаковой длины и сгруппированы по парам Если в вершинах плоского прямоугольника восстановить перпендикуляры к плоскости, то перпендикулярам соответствует расположение двух пар протяженных электродов в пространстве. Большая сторона прямоугольника определяет расстояние между электродами в каждой паре. Это расстояние выби5
0
рается таким образом, чтобы выполнялось условие образования квазиста- тического плоскопараллельного поля между электродами в каждой паре при подаче на них переменного напряжения. Расстояние между электродами в каждой паре должно быть значительно мень- . ше длины волны зондирующего сигнала.
Генератор 1 служит для создания зондирующего сигнала синусоидальной формы. Генератор может быть выполнен по известным схемам на операционном усилителе с мостом Вина. Нижняя частота гармонического сигнала генератора должна быть на порядок вьше максимально возможной радиальной скорости прохождения объектом промежутка между электродами, а .верхняя частота определяется условиями затухания сигнала в данной среде.
Преобразователь 2 предназначен для стабилизации тока через электродные нагрузки датчиков 7 и 10, что позволяет получить линейную зависимость между изменением междуэлектродной проводимости датчиков и приращением напряжения на них, и тем самым обеспечивает повышенную чувствительность измерительной части устройства. - Формирователь 3 служит для формирования прямоугольньпс импульсов из , гармонического сигнала, поступающего с выхода генератора 1.
р
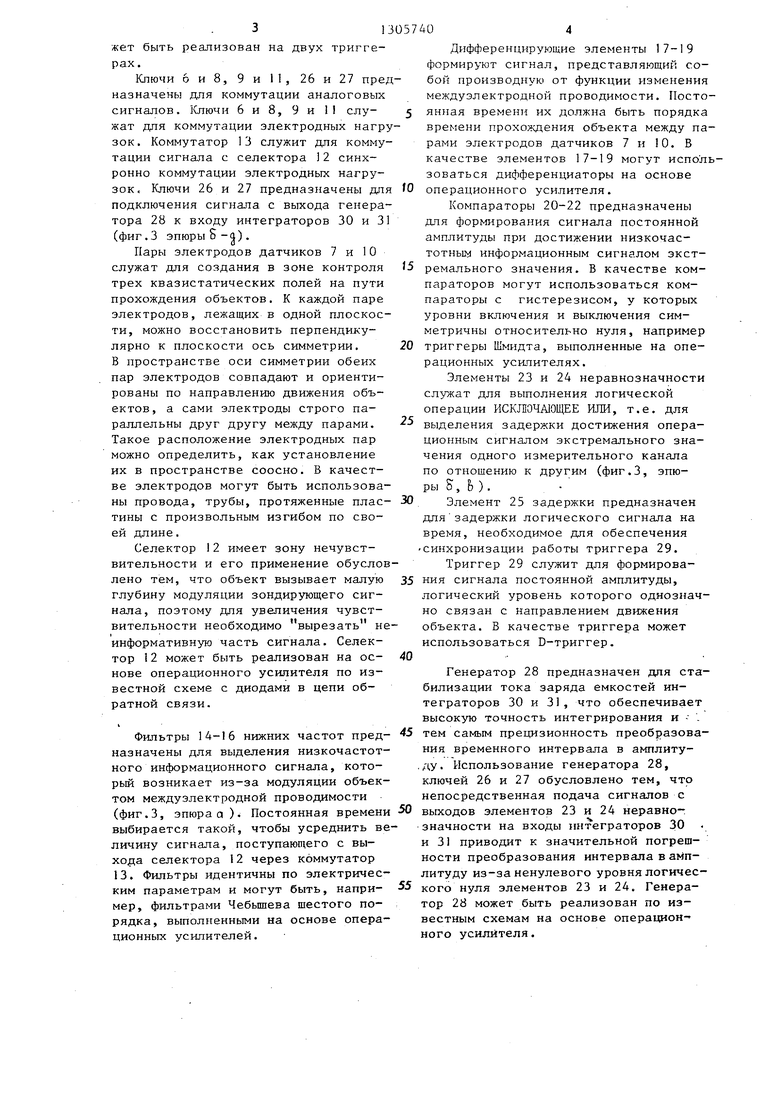
35 Делитель 4 частоты предназначен для деления частоты исходного сигнала. Поскольку в предложенном устройстве реализуется временной принцип разделения между тремя изкери40 тельными каналами (первый канал - измеряется проводимость между электродами 35 и 36, второй - между , электродами 37 и 38, третий - между электродами 35 и 38), то опти45 мальный коэффициент деления равен 6 (фиг.4). При этом проводимость одного канала измеряется за два периода зондирующего сигнала (фиг.2).
5
Регистр 5 сдвига предназначен для формирования управляющих сигналов для коммутации электродных нагрузок датчиков 7 и i О и коммутатора 13. С первых ег о трех выходов поступают прямые сигналы управления, а с четвертого и пятого - инверснь е по отношению соответственно к второму и третьему выходам (фиг.2, эпюры5 е). Регистр сдвига - трехразрядный и мо
3
жет быть реализован на двух триггерах.
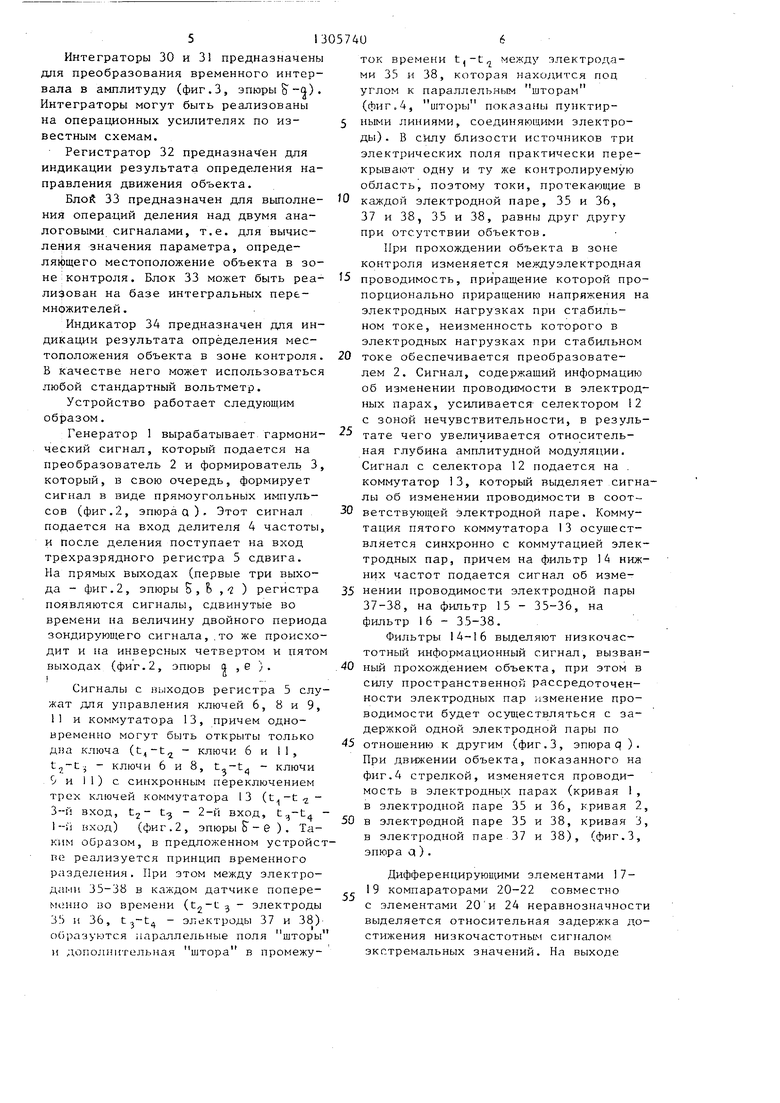
Ключи 6 и 8, 9 и 11, 26 и 27 преназначены для коммутации аналоговых сигналов. Ключи 6 и 8, 9 и 1 слу- жат для коммутации электродных нагрзок . Коммутатор 13 служит для коммутации сигнала с селектора 12 синхронно коммутации электродных нагрузок. Ключи 26 и 27 предназначены дл подключения сигнала с выхода генератора 28 к входу интеграторов 30 и 3 (фиг.З эпюрыS-а).
Пары электродов датчиков 7 и 10 служат для создания в зоне контроля трех квазистатических полей на пути прохождения объектов. К каждой паре электродов, лежащих в одной плоскости, можно восстановить перпендикулярно к плоскости ось симметрии. В пространстве оси симметрии обеих пар электродов совпадают и ориентированы по направлению движения объектов, а сами электроды строго параллельны друг другу между парами. Такое расположение электродных пар можно определить, как установление их в пространстве соосно. В качестве электродов могут быть использованы провода, трубы, протяженные плас тины с произвольным изгибом по своей длине.
Селектор 12 имеет зону нечувствительности и его применение обуслолено тем, что объект вызывает малую глубину модуляции зондирующего сигнала, поэтому для увеличения чувствительности необходимо вырезать нинформативную часть сигнала. Селектор 12 может быть реализован на основе операционного усилителя по известной схеме с диодами в цепи обратной связи.
Генератор 28 предназначен для с билизации тока заряда емкостей интеграторов 30 и 31, что обеспечива высокую точность интегрирования и тем самым прецизионность преобразо ния временного интервала в амплиту ду. Использование генератора 28, ключей 26 и 27 обусловлено тем, чт непосредственная подача сигналов с
Фильтры 14-16 нижних частот пред- назначены для выделения низкочастотного информационного сигнала, кото- рьм возникает из-за модуляции объектом междузлектродной проводимости (фиг.З, эпюра а ). Постоянная времени -50 выходов элементов 23 и 24 неравно- выбирается такой, чтобы усреднить не- значности на входы интеграторов 30 личину сигнала, поступающего с выхода селектора 12 через коммутатор 13. Фильтры идентичны по электричеси 31 приводит к значительной погреш ности преобразования интервала в амп литуду из-за ненулевого уровня логиче 55 кого нуля элементов 23 и 24. Генера тор 28 может быть реализован по известным схемам на основе операционноге усилителя.
ким параметрам и могут быть, например, фильтрами Чебьшева шестого порядка, выполненными на основе операционных усилителей.
fO
(5
5
0
Дифференцирующие элементы 17-19 формируют сигнал, представляющий собой производную от функции изменения междуэлектродной проводимости. Постоянная времени их должна быть порядка времени прохождения объекта между парами электродов датчиков 7 и 10. В качестве элементов 17-19 могут использоваться дифференциаторы на основе операционного усилителя.
Компараторы 20-22 предназначены для формирования сигнала постоянной амплитуды при достижении низкочастотным информационным сигналом экстремального значения. В качестве компараторов могут использоваться компараторы с гистерезисом, у которых уровни включения и выключения симметричны относительно нуля, например триггеры Шмидта, выполненные на операционных усилителях.
Элементы 23 и 24 неравнозначности служат для выполнения логической операции ИСКЛЮЧАЮЩЕЕ ИЛИ, т.е. для выделения задержки достижения операционным сигналом экстремального значения одного измерительного канала по отношению к другим (фиг.З, эпюры 5 , Ь ).
Элемент 25 задержки предназначен для задержки логического сигнала на время, необходимое для обеспечения синхронизации работы триггера 29.
Триггер 29 служит для формирова- 5 ния сигнала постоянной амплитуды,
логический уровень которого однозначно связан с Направлением движения объекта. В качестве триггера может использоваться D-триггер.
0
5
40
Генератор 28 предназначен для стабилизации тока заряда емкостей интеграторов 30 и 31, что обеспечивает высокую точность интегрирования и - . тем самым прецизионность преобразования временного интервала в амплитуду. Использование генератора 28, ключей 26 и 27 обусловлено тем, что непосредственная подача сигналов с
выходов элементов 23 и 24 неравно- значности на входы интеграторов 30
выходов элементов 23 и 24 неравно- значности на входы интеграторов 30
и 31 приводит к значительной погрешности преобразования интервала в амплитуду из-за ненулевого уровня логичес- кого нуля элементов 23 и 24. Генератор 28 может быть реализован по известным схемам на основе операцион- ноге усилителя.
ю
15
20
51305740
Интеграторы 30 и 3 предназначены ДД1Я преобразования временного интервала в амплитуду (фиг.З, эпюры В -а). Интеграторы могут быть реализованы на операционных усилителях по известным схемам.
Регистратор 32 предназначен для индикации результата определения направления движения объекта.
Блой 33 предназначен для выполнения операций деления над двумя аналоговыми сигналами, т.е. для вычисления значения параметра, определяющего местоположение объекта в зоне контроля. Блок 33 может быть реализован на базе интегральных перемножителей .
Индикатор 34 предназначен для индикации результата определения местоположения объекта в зоне контроля. В качестве него может использоваться любой стандартный вольтметр.
Устройство работает следующим образом.
Генератор 1 вырабатывает гармонический сигнал, который подается на преобразователь 2 и формирователь 3, который, в свою очередь, формирует сигнал в виде прямоугольных импульсов (фиг.2, эпюраQ), Этот сигнал подается на вход делителя 4 частоты, и после деления поступает на вход трехразрядного регистра 5 сдвига. На прямых выходах (первые три выхода - фиг.2, эпюры S, Ь ,-2 ) регистра появляются сигналы, сдвинутые во времени на величину двойного периода зондирующего сигнала,.то же происходит и на инверсных четвертом и пятом выходах (фиг.2, эпюры а , е ).
,
Сигналы с выходов регистра 5 служат для управления ключей 6, 8 и 9, 11 и коммутатора 13, причем одновременно могут быть открыты только дна ключа ( - ключи 6 и 11,
ток времени ми 35 и 38,
t,-C между
25
tj-t, ключи 6 и 8, t -t - ключи V и II) с синхронным переключением трех ключей коммутатора 13 (t,-t t-} - 2-й вход,
t,-t4 3-й вход,
1-й вход) (фиг. 2, эпюры S - е ). Таким образом, в предложенном устройстве реализуется принцип временного разделения, При этом между электродами 35-38 в каждом датчике попереМ(М1Но во времени (t,-i: - электроды +- ,
3 4
электродакоторая находится под углом к параллельным шторам (фиг.4, шторы показаны пунктирными линиями, соединяющими электроды) . В силу близости источников три электрических поля практически перекрывают одну и ту же контролируемую область, поэтому токи, протекающие в каждой электродной паре, 35 и 36, 37 и 38, 35 и 38, равны друг другу при отсутствии объектов.
При прохождении объекта в зоне контроля изменяется междуэлектродная проводимость, приращение которой пропорционально приращению напряжения на электродных нагрузках при стабильном токе, неизменность которого в электродных нагрузках при стабильном токе обеспечивается преобразователем 2. Сигнал, содержащий информацию об изменении проводимости в электродных парах, усиливается- селектором 12 с зоной нечувствительности, в результате чего увеличивается относительная глубина амплитудной модуляции. Сигнал с селектора 12 подается на . коммутатор 13, который выделяет сигналы об изменении проводимости в соответствующей электродной паре. Коммутация пятого коммутатора 13 осуществляется синхронно с коммутацией электродных пар, причем на фильтр 14 нижних частот подается сигнал об изме35 нении проводимости электродной пары 37-38, на фильтр 15 - 35-36, на фильтр 16 - 35-38.
Фильтры 14-16 выделяют низкочастотный информационный сигнал, вызван40 ный прохождением объекта, при этом в силу пространственной рассредоточен- ности электродных пар изменение проводимости будет осуществляться с задержкой одной электродной пары по
45 отношению к другим (фиг.З, эпюраq ). При движении объекта, показанного на фиг,4 стрелкой, изменяется проводимость в электродных парах (кривая 1, в электродной паре 35 и 36, кривая 2,
50 в электродной паре 35 и в электродной паре 37 и эпюра а).
30
38, кривая 3, 38), (фиг.З,
55
35 и 36, t,,-t4 - электроды 37 и 38)
о()разуются параллельные поля шторы и дополнительная штора в промежуII
Дифференцирующими элементами 17- 19 компараторами 20-22 совместно с элементами 20 и 24 неравнозначности выделяется относительная задержка достижения низкочастотным сигналом экстремальных значений. На выходе
ток времени ми 35 и 38,
t,-C между
которая нахо углом к параллельным ш (фиг.4, шторы показаны ными линиями, соединяющ ды) . В силу близости ис электрических поля прак крывают одну и ту же ко область, поэтому токи, каждой электродной паре 37 и 38, 35 и 38, равны при отсутствии объектов
38, кривая 3, 38), (фиг.З,
Дифференцирующими элементами 17- 19 компараторами 20-22 совместно с элементами 20 и 24 неравнозначности выделяется относительная задержка достижения низкочастотным сигналом экстремальных значений. На выходе
выделяется сигнал о за в параллельных шторах
элемента 23 держке itp т.е. между парами электродов 35, 36 и 37, 38 (фиг.З, эпюраЬ), а на выходе элемента 24 - о задержке &t между парами электродов 35, 36 и 37, 38 (фиг.З, эпюра &). Из геометрических построений (фиг.4, ра а ) видно, что
эпюUX t ux utj It
ДХ,
ix const.
it
TO ux ---- AtМестоположение объекта в зоне контроля однозначно определяется отношением задержек it и Ь t , причем это соотношение остается справедлимым для входа объекта под углом в зону контроля, так как. (фиг.45)
Лх
их;
л X,
Дпя вычисления
t
Tt
ь t
отношения -Г-- ис
пользуется предварительное преобразование временных интервалов (задержек) ut и utg,B амплитуду, для чего сигнал с генератора 28 подается через ключи 26 и 27 соответственно на время иt и ut на входы интеграторов 30 и 31 (фиг.З, эпюры ). С выходов интеграторов 30 и 31 аналоговые сигналы поступают на соответствующие входы блока 33, который вычисляет их отношение, и тем самым определяется местоположение объекта в зоне контроля (фиг.З, эпюра
е). Очевидно, отношение ----- в сереЛ. tg
дине зоны контроля равно 0,5; в верх йен положении О, в нижнем - I (фиг.4 Индикация результата определения относительного местоположения объекта осуществляется индикатором 34.
Определение направления движения объекта происходит путем сопоставления фазы импульсов bt и й, если они начинаются одновременно, то триггер 29 будет через элемент задержки устанавливается в единичное состояние, что будет соответствовать направлению двугжения, показанному на фиг.4, при противоположном направлении трнттер 29 установится в нулевое состояние.
fO
15
0
5
0
5
0
изобрете1гия
5
0
5
Формул
УстроГгство для учета движущ1;хся объектов, содержащее генератор переменного напряжения, выход которого через формирователь импульсов соединен с входом делителя частоты и непосредственно - с входом преобразователя напряжения в ток, выход которого подключен к входам амплитудного селектора и первого, второго ключей, выходы последних соответственно через первый и второй электродные , датчики соединены с входами третьего и четвертого ключей, выходы которых соединены с общей шиной питания преобразователя напряжения в ток, дифференцирующий элемент, компаратор, четвертый и пятый ключи, выход первого из которых подключен к входу первого интегратора, и регистратор, отличающееся тем, что, с целью расширения функциональных возможностей устройства путем определения местоположения объекта в зоне контроля, в него введены коммутатор, фильтры нижних частот, дифференцирующие элементы, компараторы, элементы неравнозначности, элемент задержки, триггер, генератор постоянного тока, второй интегратор, блок аналогового деления, индикатор и регистр сдвига, первый, второй, третий и четвертый выходы которого соединены соответственно с управляющими входами первого, четвертого, второго и третьего ключей, выход делителя частоты подключен к входу регистра сдвига, третий, четвертый и пятый вькоды которого соединены с управляющими входами коммутатора, выход амплитудного селектора подключен к входу коммутатора , первый выход которого через последовательно соединенные первые фильтр нижних частот, дифференцирующий элемент и компаратор подключен к первому входу первого элемента неравнозначности, выход которого соединен с управляющим входом пятого ключа и с входом элемента задержки, выход которого подключен к первому входу триггера, выход которого соединен с входом регистратора, второй выход коммутатора через последовательно соединенные вторые фильтр нижних частот, дифференцирующий элемент и компаратор подключен к второму входу первого элемента неравнозначности и к первому входу второго
элемента неравнозначности, выход которого соединен с вторым входом триггера и с управляющим входом шестого ключа, выход которого подключен к входу Btoporo интегратора, третий вы- ход коммутатора через последовательно соединенные третьи ;фильтр нижних частот, дифференцирующий элемент и
а.{
1 1
Фиг.2
компаратор подключен к второму входу второго элемента неравнозначности, выход генератора постоянног-о тока соединен с входами пятого и шестого ключей , выходы интеграто - ров через блок аналогового деления подключены к входу индикатора .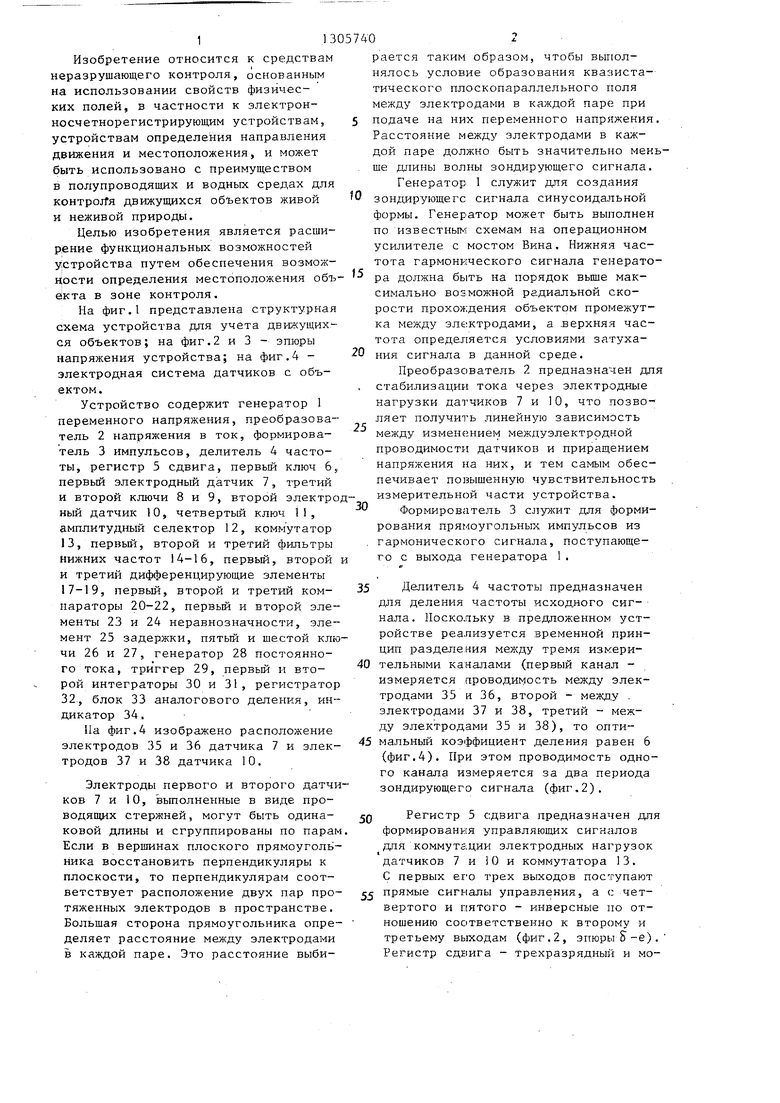
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для счета движущихся объектов | 1984 |
|
SU1218410A1 |
| Устройство для счета движущихся объектов | 1985 |
|
SU1312623A1 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Устройство для учета движущихся объектов | 1985 |
|
SU1278908A1 |
| Устройство для счета движущихся объектов | 1984 |
|
SU1231522A1 |
| Многоканальная телеизмерительная система | 1985 |
|
SU1390624A1 |
| Диэлькометрический датчик | 1986 |
|
SU1566306A1 |
| Электроконтактный дефектоскоп для контроля проводящих сред | 1983 |
|
SU1165966A1 |
| Устройство для управления стабилизирующим преобразователем постоянного напряжения | 1986 |
|
SU1534678A1 |
| Цифровой измеритель температуры | 1984 |
|
SU1224609A1 |
Изобретение относится к средствам неразрушающего контроля, основанным на использовании свойств фи-. зических полей. Устройство помимо учета числа объектов и направления их движения позволяет определить положение объекта в зоне контроля. Устройство содержит генератор 1 переменного напряжения, преобразователь 2 напряжения в ток, формирователь 3 импульсов, делитель 4 частоты, регистр сдвига, ключи 6, 8, 9, 11, 26 и 27, электродные датчики 7 и 10, амплитудный селектор 12, коммутатор 13, фильтры 14-16 нижних частот, дифференцируюцц1е элементы 17-18, компараторы 20-22, элементы неравнозначности 23, 24, элемент задержки 25, триггер 29, регистратор 32, интеграторы 30, 31, блок 33 аналогового деления, генератор 28 постоянного тока и индикатор 34, 4 ил. I (Л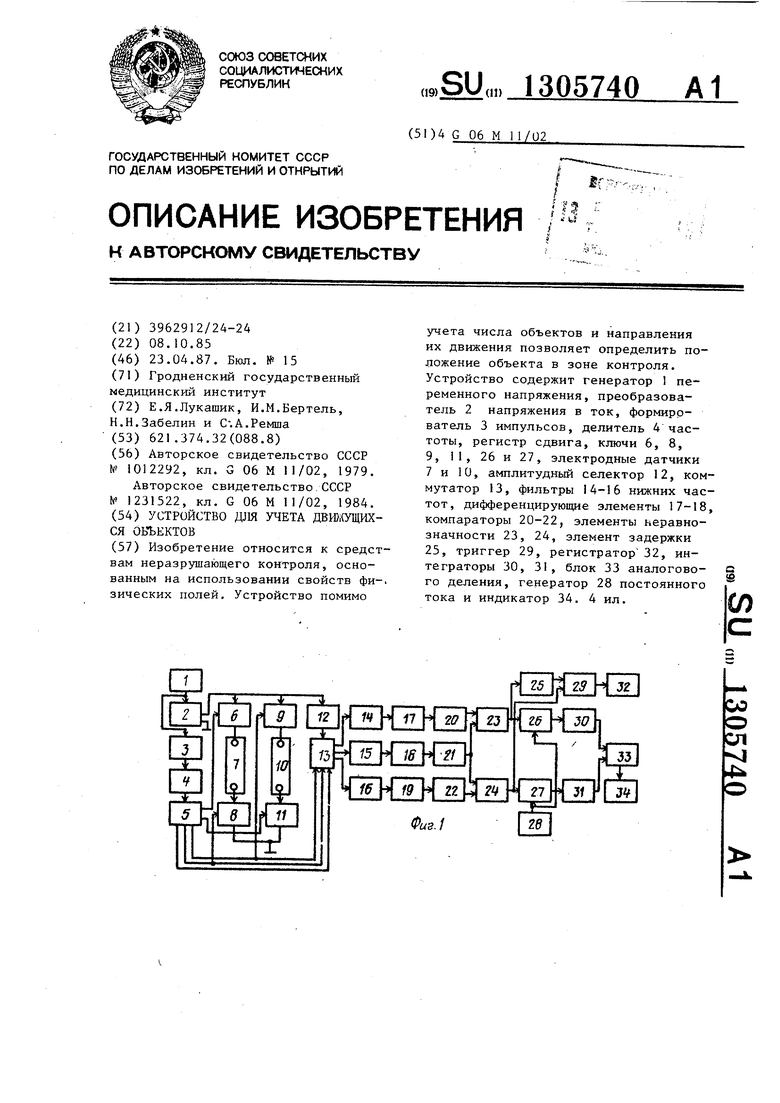
а
П
.1
г
Фаг.З
х
Г
35 38
Редактор В,.Данко
Составитель Г.Усачев Техред Л.Сердюкова
Заказ 1455/49 Тираж 673.Подписное
ВНЖШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
ФигЛ
Корректор Е.Рошко
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для счета движущихся объектов | 1984 |
|
SU1231522A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
