Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением с электромагнитным приводом и систем управления этим приводом.
Цель изобретения - повьппение эффективности работы электромагнитного привода путем исключения преждевременного включения молота на холостой (обратный) ход и обеспечение точного контроля рабочего положения бойка после каждого удара с учетом осадки поковки.
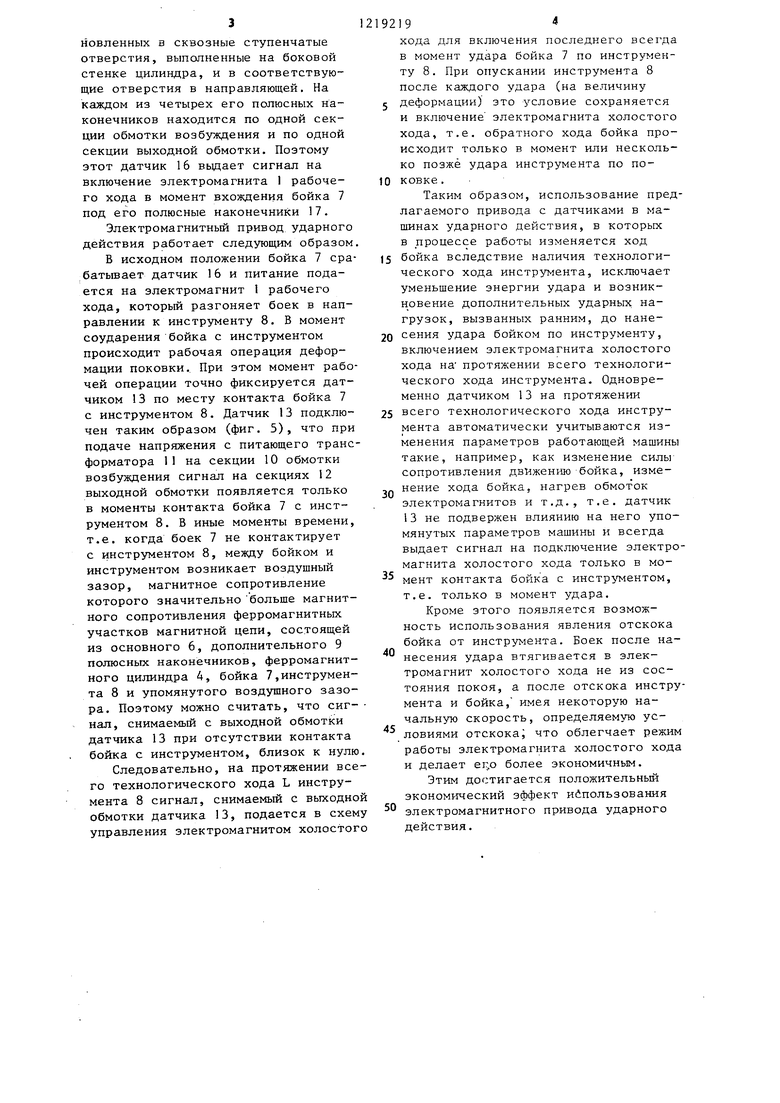
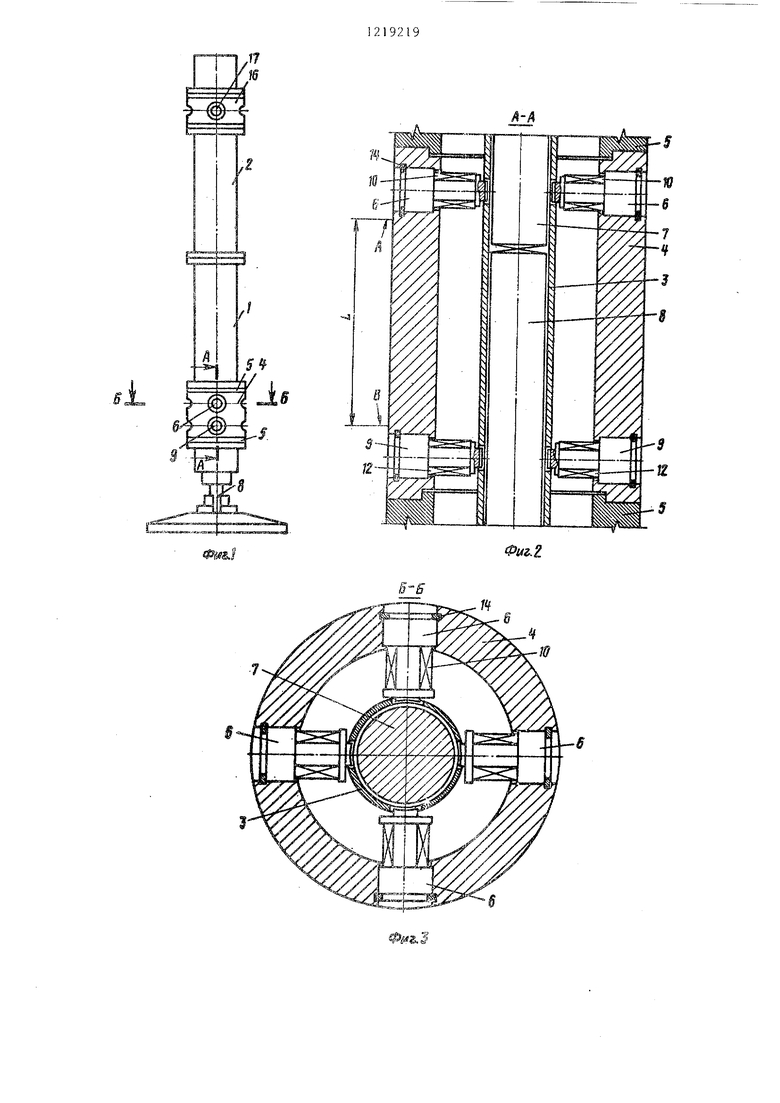
На фиг, 1 изображен электромагнит ньй привод ударного действия с индукционным датчиком положения, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схема размещения электромагнитов и датчиков в приво-- де; на фиг. 5 - схема подключения обмоток датчиков.
Электромагнитный привод ударного действия содержит- электромагниты рабочего 1 и холостого 2 хода, установленные на немагнитной направляющей 3, и примыкающей к нижнему полюсу электромагнита .1 рабочего хода ферромагнитный сердечник, выполнен- ный в форме полого дилиндра 4, у которого верхнее и нижнее основания 5 выполнены из немагнитного материала в форме фланцев, и систему основных полюсных наконечников (фиг.З состоящую из четырех съемных полюсных наконечников 6, расположенных в одной плоскости под прямым углом один к другому и установленных в сквозные ступенчатые отверстия, выполненные на боковой стенке полого цилиндра 4, и в соответствующие отверстия в направляющей 3, Ферромагнитный боек 7, частью своей длины входящий в электромагнит 2 холостого хода, расположен в направляющей 3 под основными полюсными наконечниками 6. Боек 7 контактирует с ферромагнитным инструментом 8,, который частью своей длины находится в направляющей 3. Инструмент 8 имеет технологический ход L, определяемый начальным А и конечным В положениями инструмента 8 (фиг. 2).
На боковой стенке цилиндра 4 на расстоянии, не меньшем технологического хода L инструмента 8, установлена система дополнительных полюсных наконечников 9, идентичная система основных полюсных наконеч15
20
192192
НИКОВ 6, т.е. состоящая из четырех дополнительных полюсных наконечников 9, расположенных в одной плоскости под прямым углом один к дру- 5 гому, установленных в сквозные ступенчатые отверстия, выполненные на боковой стенке цилиндра 4, и в соот- ветствуюш е отверстия в направляющей 3..
10 Четыре разомкнутых магнитных цепи каждая из которых; состоит (фиг. 2.)
из основного 6 и дополнительного 9 полюсных наконечников и части ферромагнитного цилиндра 4, в каждую из которых, на расстоянии не меньшем технологического хода L инструмента 8, замыкают в момент удара контактирующие боек 7 и инструмент 8,
На каждом основном полюсном наконечнике 6 размещают по одной секции
10обмотки возбужденияf которые подключены к питающему трансформатору
11(фиг. 5) таким образом, что создаваемые ими в контактирующих бойке
25 7 и инструменте 8 магнитные потоки имеют одинаковые направления. На каждом дополнительном полюсном наконечнике 9 размещено по одной секции 12 выходной обмотки, которые соединены последовательно так, что их сигналы суммируются.
Боек 7 удлинен на величину, не меньщую технологического хода L инструмента 8.
Датчик 13 рабочего положения бой35 ка (фиг. 4) примыкает к нижнему полюсу электромагнита 1 рабочего хода. Основные 6 и дополнительные 9 полюсные наконечники удерживаются стопорными кольцами 4. Сигнал, снимаемый с датчика 13, через выпрямительный мост 15 подается в схему управления электромагнитом 2 холостого хода. Датчик 16 исходного положения бойка, примыкающий к верхнему полюсу электромагнита 2 холостого хода, служит для управления подачей импульсов тока в электромагнит 1 рабочего хода (перед началом хода). Датчик 16 состоит из ферромагнитного сердечника, вьтолненного в форме полого цих индра, у которого верхнее и нижнее основания выполнены из немагнитного материала в форме фланцев, системы полюсных наконечников 17,
55 состоящей из четырех съемных полюсных наконечников, расположенных в одной шюскости под ПРИ мым углом один к другому и уста-.
30
40
45
50
новленных в сквозные ступенчатые отверстия, выполненные на боковой стенке цилиндра, и в соответствующие отверстия в направляющей. На каждом из четырех его полюсных наконечников находится по одной секции обмотки возбуждения и по одной секции выходной обмотки. Поэтому этот датчик 16 вьщает сигнал на включение электромагнита 1 рабочего хода в момент вхождения бойка 7 под его полюсные наконечники 17.
Электромагнитный привод ударного действия работает следующим образом
В исходном положении бойка 7 ера батьшает датчик 16 и питание подается на электромагнит 1 рабочего хода, который разгоняет боек в направлении к инструменту 8. В момент соударения бойка с инструментом происходит рабочая операция деформации поковки. При этом момент рабочей операции точно фиксируется датчиком 13 по месту контакта бойка 7 с инструментом 8. Датчик 13 подключен таким образом (фиг. 5), что при подаче напряжения с питающего трансформатора 1 на секции 10 обмотки возбуждения сигнал на секциях 12 выходной обмотки появляется только в моменты контакта бойка 7 с инструментом 8. В иные моменты времени, т.е. когда боек 7 не контактирует с инструментом 8, между бойком и инструментом возникает воздущный зазор, магнитное сопротивление которого значительно больше магнитного сопротивления ферромагнитных участков магнитной цепи, состоящей из основного 6, дополнительного 9 полюсных наконечников, ферромагнитного цилиндра 4, бойка 7,инструмента 8 и упомянутого воздушного зазора. Поэтому можно считать, что сиг- нал, снимаемый с выходной обмотки датчика 13 при отсутствии контакта бойка с инструментом, близок к нулю
Следовательно, на протяжении всего технологического хода L инструмента 8 сигнал, снимаемый с выходно обмотки датчика 13, подается в схем управления электромагнитом холостог
5
0
5
0
5
0
5
0
хода для включения последнего всегда в момент удара бойка 7 по инструменту 8. При опускании инструмента 8 после каждого удара (на величину деформации) это условие сохраняется и включение электромагнита холостого хода, т.е. обратного хода бойка происходит только в момент или несколько позже удара инструмента по поковке .
Таким образом, использование предлагаемого привода с датчиками в машинах ударного действия, в которых в процессе работы изменяется ход бойка вследствие наличия технологического хода инструмента, исключает уменьшение энергии удара и возник- н овение дополнительных ударных, нагрузок, вызванных ранним, до нанесения удара бойком по инструменту, включением электромагнита холостого хода на протяжении всего технологического хода инструмента. Одновременно датчиком 13 на протяжении всего технологического хода инструмента автоматически учитываются изменения параметров работающей машины такие, например, как изменение силы сопротивления движению бойка, изменение хода бойка, нагрев обмоток электромагнитов и т.д., т.е. датчик 13 не подвержен влиянию на него упомянутых параметров машины и всегда выдает сигнал на подключение электромагнита холостого хода только в момент контакта бойка с инстру 5ентом, т.е. только в момент удара.
Кроме этого появляется возможность использования явления отскока бойка от инструмента. Боек после нанесения удара втягивается в электромагнит холостого хода не из состояния покоя, а после отскока инструмента и бойка, имея некоторую начальную скорость, определяемую условиями отскока что облегчает режим работы электромагнита холостого хода и делает ег,о более экономичным.
Этим достигается положительный экономический эффект использования электромагнитного привода ударного действия.
/
17 16
К
Ф141.2.
-2
rvS 12
u
п
72 IJ /2
12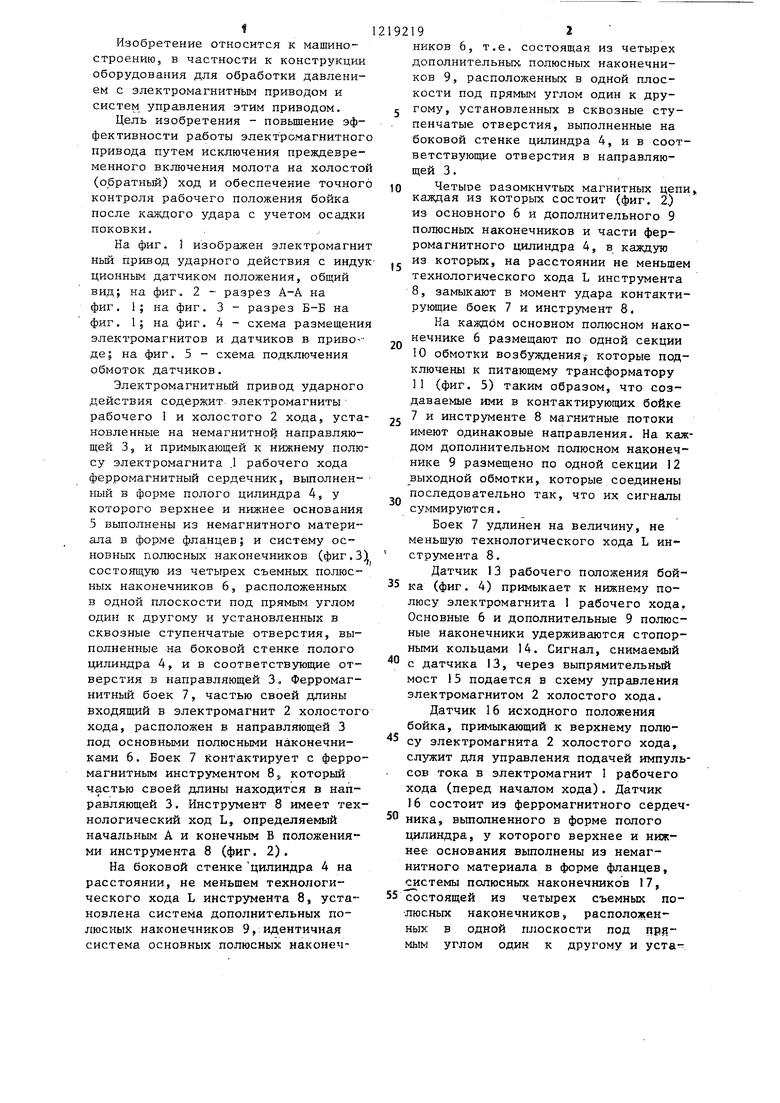
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик положения бойка электромагнитного двигателя | 1983 |
|
SU1171917A1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| Электромагнитный привод возвратно-поступательного движения | 1984 |
|
SU1169130A1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Ударный узел электромагнитного перфоратора | 1990 |
|
SU1700226A1 |
:ooc
П15.
-лЛ
V
Фл/г.
Составитель В. Стоколов Редактор Е. Папп Техред И.Верес Корректор Е.
Заказ 1189/15 Тираж 655Подписное
ВНИШ1И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. У-.город, ул, Проектная,
в упраёлений злвцтромагнито 1 м- Аостого кода
фиг.5
| Способ защиты паропровода от попадания в него мазута | 1983 |
|
SU1141262A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
