6 гг 8 п S Ю1.1.2 гаг гз ю.ъ д, /7-/ /йт-.
нте
fiaxe с / -Л- - ftff/lC в
Фиг. г
п.
ОЭ со 4
00
оо оо
Изобретение относится к управлению электрическими машинами и может быть использовано при создании электромагнитных молотов.
Цель изобретения состоит в повышении надежности, уменьшении габаритов и материалоемкости, .
На фиг.1 локаэган электромагнитный
сеисмоисточника с предварительным поднятием излучающей плиты d...., за жЧкС
дается порядка 20-30 мм.
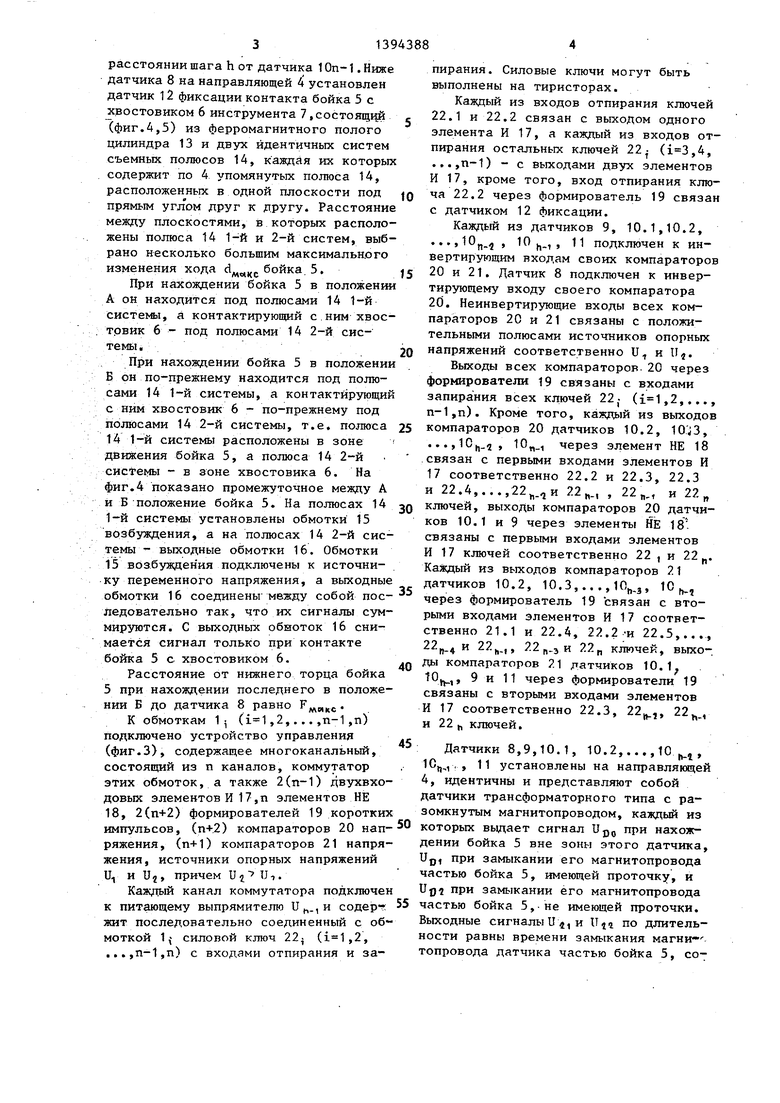
На концах бойка 5 выполнены управляющие проточки, кдждая из которых имеет длину равную максимальному рабочему зазору обмотки 1.2 (фиг.2). Глубина этих проточек колеб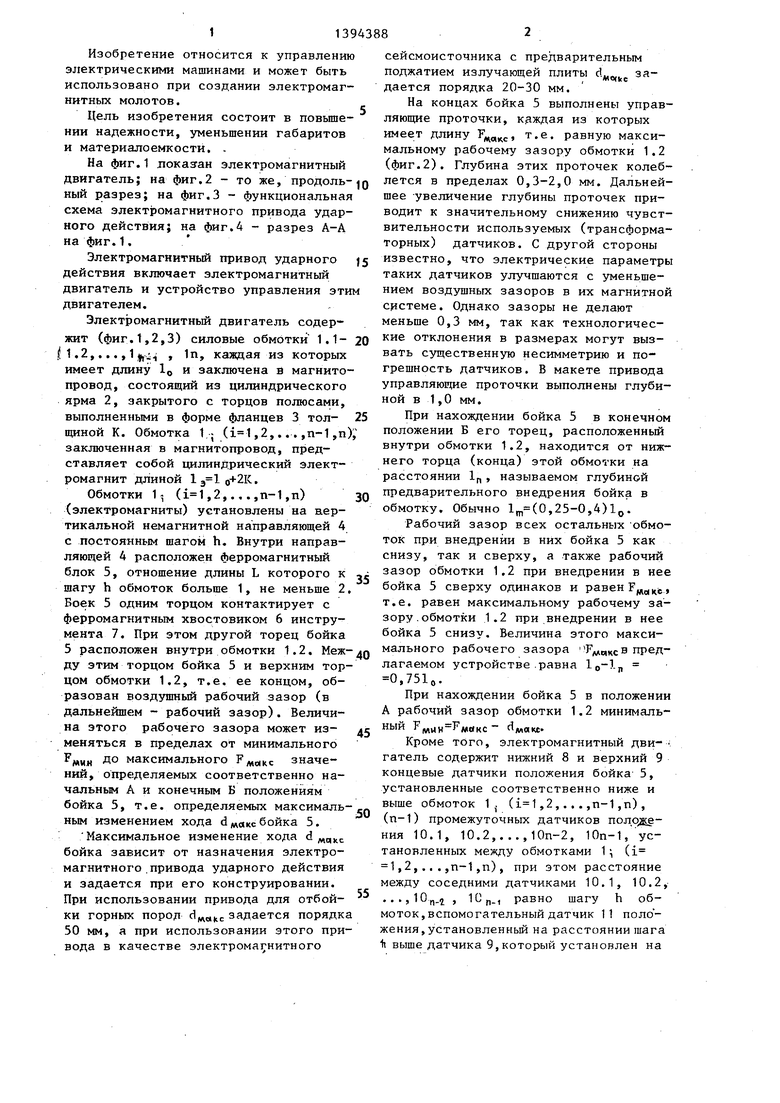
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
| Электромагнитный привод ударного действия | 1988 |
|
SU1624653A1 |
| Электрическая машина ударного действия | 1990 |
|
SU1710720A1 |
| Ударный узел электромагнитного перфоратора | 1989 |
|
SU1707194A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Электромагнитный привод | 1983 |
|
SU1086539A1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| Устройство для отключения двигателя внутреннего сгорания | 1981 |
|
SU992774A2 |
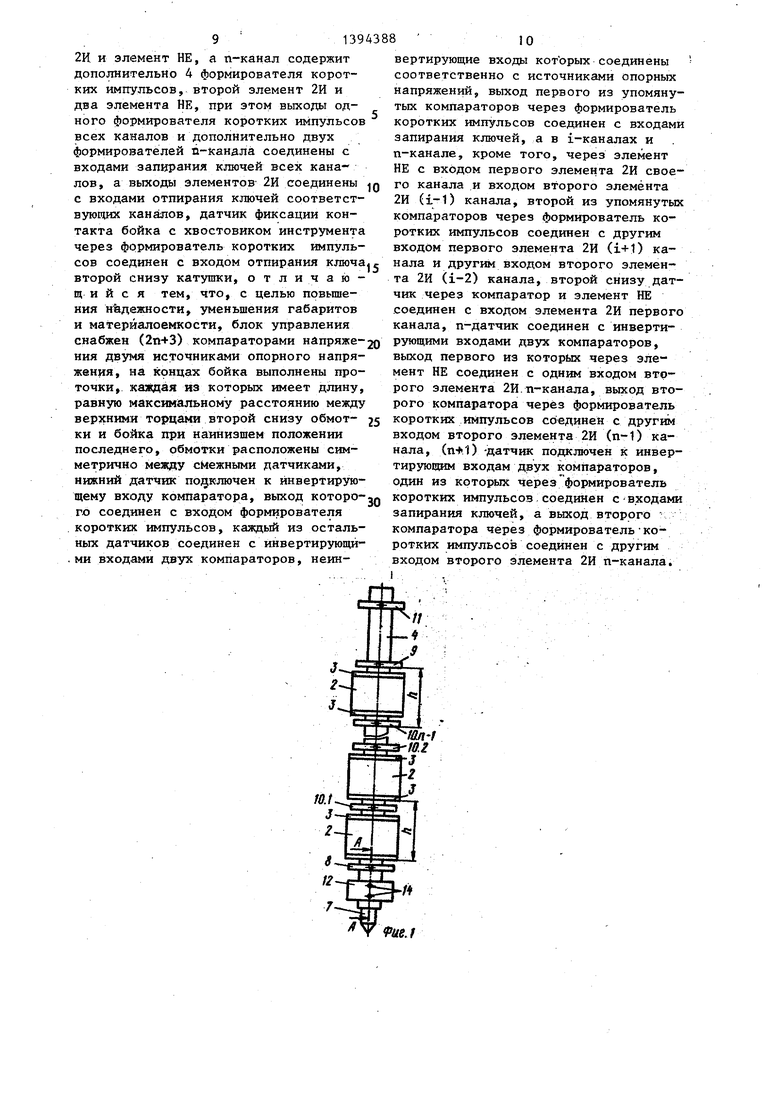
Изобретение относится к электротехнике и может быть использовано при разработке электромагнитных машин ударного действия для горной, строительной и других отраслей народного хозяйства. Цель состоит в повьшении надежности и уменьшении габаритов, материалоемкости. Привод ударного действия содержит электромагнитный двигатель, содержащий обмотки 1, боек 5, совершающий возвратно-поступательное движение внутри направляющей 4. На концах бойка 5 выполнены управляющие проточки, каждая из которой имеет длину рабочего зазора второй снизу обмотки, определяемую конечным положением бойка. Датчики 8-11 положения бойка 5 установлены на направляющей 4 и выдают сигналы П .до - при нахождении бойка 5 вне зоны датчика, Upi - при его замыкании частью бойка 5 с проточкой, Uj ° замыкании частью бойка 5 без проточки. Схема управления выдает управляющий сигнал на управляющие обмотки двигателя в зависимости от сигналов датчиков. 4 ил. S л
двигатель; на фиг,2 - то же, продоль- Q лется в пределах 0,3-2,0 мм. Дальней- ный разрез; на фиг.З - функциональная схема электромагнитного привода ударного действия; на фиг,А - разрез А-А на фиг.1.
Электромагнитный привод ударного |5 действия включает электромагнитный двигатель и устройство управления этим двигателем.
Электромагнитный двигатель содершее увеличение глубины проточек приводит к значительному снижению чувствительности используемых (трансформаторных) датчиков. С другой стороны известно, что электрические параметры таких датчиков улучшаются с уменьшением воздушных зазоров в их магнитной системе, Однако зазоры не делают меньше 0,3 мм, так как технологичесжит (фиг.1,2,3) силовые обмотки 1,1- 20 отклонения в размерах могут выз- IJ 1 «2,..., 1 |,i , In, каждая из которых имеет длину 1 и заключена в магнито- провод, состоящий из цилиндрического ярма 2, закрытого с торцов полюсами, выполненными в форме фланцев 3 тол- 25 щиной К. Обмотка 1 - (,2,... ,п-1 ,п), заключенная в магнитопровод, представляет собой хщлинДрический электромагнит длиной .
Обмотки 1 (,2,...,п-1,п) 30 (электромагниты) установлены на вертикальной немагнитной направляющей 4 с постоянным шагом h. Внутри направляющей А расположен ферромагнитный блок 5, отношение длины L которого к шагу h обмоток больше 1, не меньше 2, Боек 5 одним торцом контактирует с ферромагнитным хвостовиком 6 инструмента 7. При этом другой торец бойка
вать существенную несимметрию и погрешность датчиков. В макете привода управляющие проточки выполнены глубиной в 1,0 мм.
При нахождении бойка 5 в конечном положении Б его торец, расположенный внутри обмотки 1.2, находится от нижнего торца (конца) этой обмотки на расстоянии „, называемом глубиной предварительного внедрения бойка в обмотку. Обычно 1(0,25-0,4)1д.
Рабочий зазор всех остальных обмоток при внедрении в них бойка 5 как снизу, так и сверху, а также рабочий зазор обмотки 1.2 при внедрении в нее бойка 5 сверху одинаков и равен , т.е. равен максимальному рабочему зазору, обмотки 1.2 при внедрении в нее бойка 5 снизу. Величина этого макси5 расположен внутри обмотки 1.2. Меж-дд мального рабочего зазора Г даксВ пред- ду этим торцом бойка 5 и верхним тор- лагаемом устройстве .равна lo- -n
0,751о.
положении
дом обмотки 1.2, т.е. ее концом, образован воздушный рабочий зазор (в дальнейш€ м - рабочий зазор). Величина этого рабочего зазора может изменяться в пределах от минимального
45
При нахождении бойка 5 в А рабочий зазор обмотки 1.2 минимальный F|,4n FAi«KC fl;v,0(W.
Кроме того, электромагнитный дви- гатель содержит нижний 8 и верхний 9 концевые датчики положения бойка 5, установленные соответственно ниже и выше обмоток 1. (,2,.. . ,п-1 ,п) , (п-1) промежуточных датчиков пол.оде- ния 10.1, 10.2,...,10п-2, 10n-1, установленных между обмотками 1 (1 1,2,...,п-1,п), при этом расстояние между соседними датчиками 10.1, 10.2, ...,10„.4 , 10., равно шагу h обмоток,вспомогательный датчик 11 поло - жения,установленньй на расстоянии шага 11 выше датчика 9,который установлен на
МИ.Н
до максимального F
MdKC
значений определяемых соответственно начальным А и конечным Б положениям бойка 5, т.е. определяемых максимальным изменением хода бойка 5.
Максимальное изменение хода d д бойка заЕ1исит от назначения электромагнитного .привода ударного действия и задается при его конструировании. При использовании привода для отбойки горных пород задается порядка 50 мм, а при использовании этого привода в качестве электромагнитного
лется в пределах 0,3-2,0 мм. Дальней-
шее увеличение глубины проточек приводит к значительному снижению чувствительности используемых (трансформаторных) датчиков. С другой стороны известно, что электрические параметры таких датчиков улучшаются с уменьшением воздушных зазоров в их магнитной системе, Однако зазоры не делают меньше 0,3 мм, так как технологичес отклонения в размерах могут выз-
вать существенную несимметрию и погрешность датчиков. В макете привода управляющие проточки выполнены глубиной в 1,0 мм.
При нахождении бойка 5 в конечном положении Б его торец, расположенный внутри обмотки 1.2, находится от нижнего торца (конца) этой обмотки на расстоянии „, называемом глубиной предварительного внедрения бойка в обмотку. Обычно 1(0,25-0,4)1д.
Рабочий зазор всех остальных обмоток при внедрении в них бойка 5 как снизу, так и сверху, а также рабочий зазор обмотки 1.2 при внедрении в нее бойка 5 сверху одинаков и равен т.е. равен максимальному рабочему зазору, обмотки 1.2 при внедрении в нее бойка 5 снизу. Величина этого максиположении
5
0
5
При нахождении бойка 5 в А рабочий зазор обмотки 1.2 минимальный F|,4n FAi«KC fl;v,0(W.
Кроме того, электромагнитный дви- гатель содержит нижний 8 и верхний 9 концевые датчики положения бойка 5, установленные соответственно ниже и выше обмоток 1. (,2,.. . ,п-1 ,п) , (п-1) промежуточных датчиков пол.оде- ния 10.1, 10.2,...,10п-2, 10n-1, установленных между обмотками 1 (1 1,2,...,п-1,п), при этом расстояние между соседними датчиками 10.1, 10.2, ...,10„.4 , 10., равно шагу h обмоток,вспомогательный датчик 11 поло - жения,установленньй на расстоянии шага 11 выше датчика 9,который установлен на
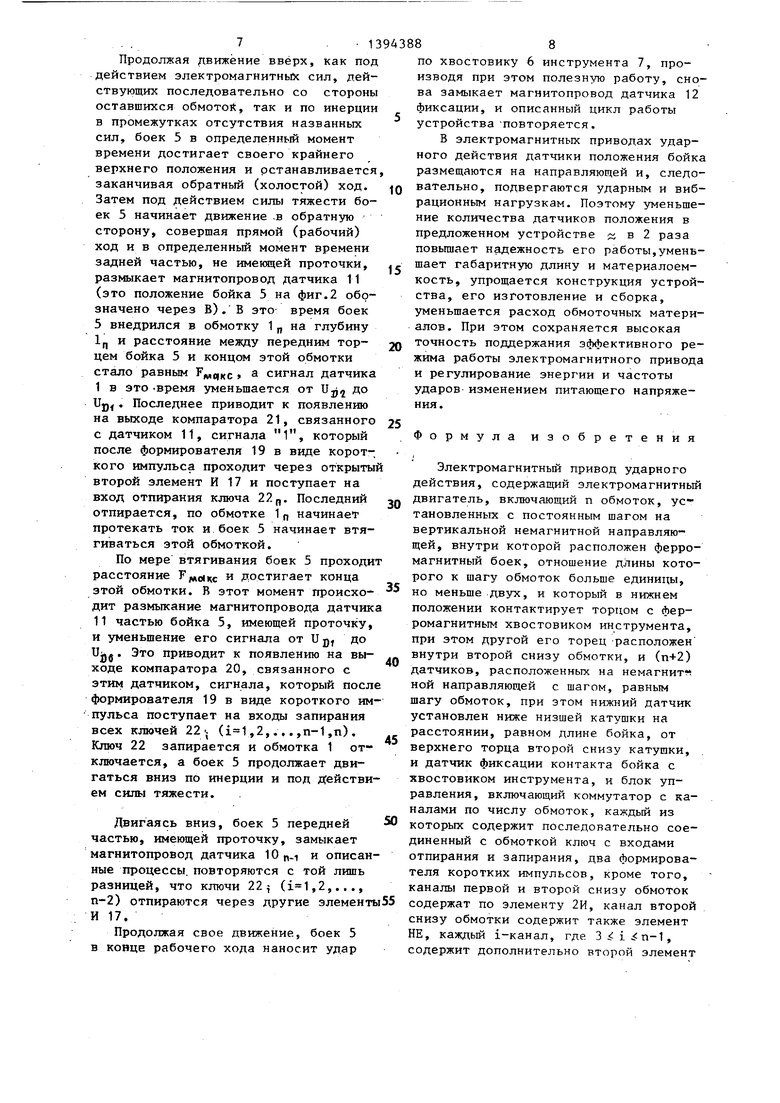
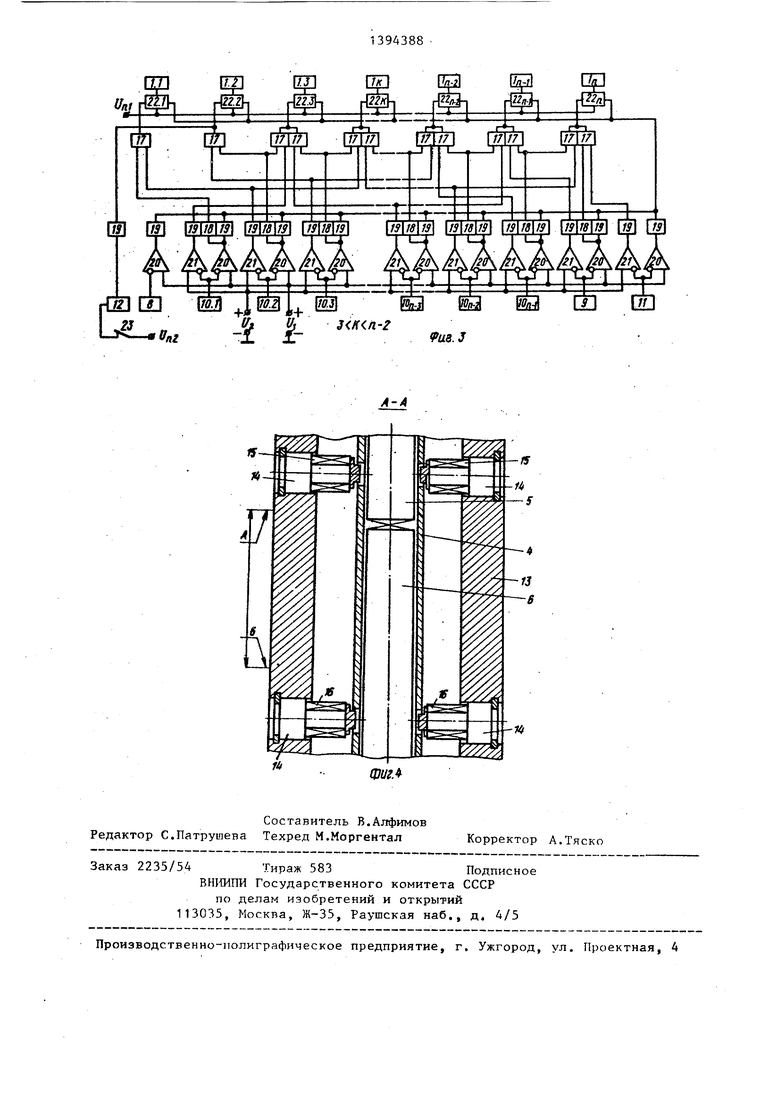
расстоянии шага h от датчика 10n-1. Ниже датчика 8 на направляющей 4 установлен датчик 12 фиксации контакта бойка 5 с востовиком 6 инструмента 7,состоящий (фиг.А,5) из ферромагнитного полого цилиндра 13 и двух идентичных систем съемных полюсов 14, к аждая их которых содержит по 4 упомянутьпс полюса 14, расположенных в одной плоскости под прямым угл ом друг к другу. Расстояние между плоскостями, в которых расположены полюса 14 1-й и 2-й систем, выбрано несколько большим максимального изменения хода d бойка.5.
При нахождении бойка 5 в положении А он находится под полюсами 14 1-й систеъы, а контактирующий с.ним хвостовик 6 - под полюсами 14 2-й системы.
При нахождении бойка 5 в положении Б он по-прежнему находится под полюсами 14 1-й системы, а контактирующий с ним хвостовик 6 - по-прежнему под полюсами 14 2-и системы, т.е. полюса
141-й системы расположены в зоне движения бойка 5, а полюса 14 2-й системы - в зоне хвостовика 6. На фиг.4 показано промежуточное между А и Б положение бойка 5. На полюсах 14 1-и системы установлены обмотки 15 возбуждения, а на полюсах 14 2-й системы - выходные обмотки 16. Обмотки
15возбужден ия подключены к источнику переменного напряжения, а выходные обмотки 16 соединены между собой последовательно так, что их сигналы сум- мирзтотся. С выходных обноток 16 снимается сигнал только при контакте бойка 5 с хвостовиком 6.
Расстояние от нижнего торца бойка 5 при нахождении последнего в положении Б до датчика 8 равно , .
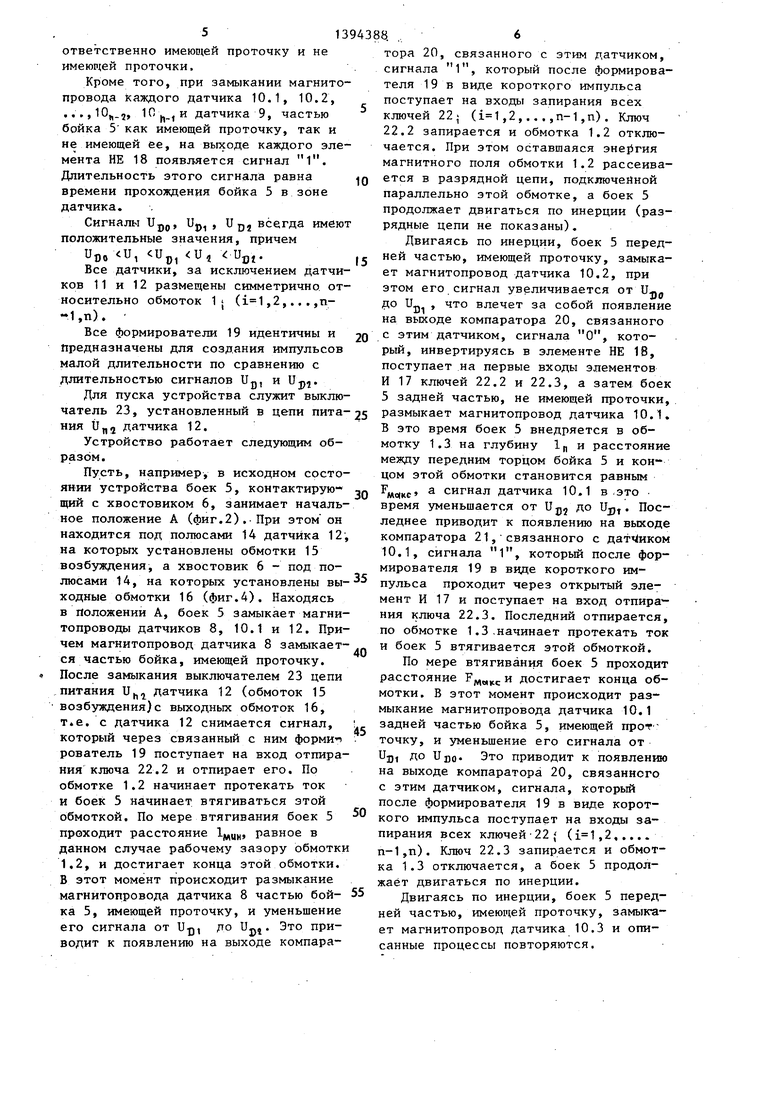
К обмоткам 1 (,2,...,п-1,п) подключено устройство управления (фиг.З), содержащее многоканальный, состоящий из п каналов, коммутатор этих обмоток, а также 2(п-1) двухвхо- довых элементов И 17,п элементов НЕ 18, 2(п+2) формирователей 19 коротких импульсов, (п-«-.2) компараторов 20 напряжения, (п+1) компараторов 21 напряжения, источники опорных напряжений и и и j, причем и J и 1.
Каждый канал коммутатора подключен к питающему выпрямителю и.,и содерг жит последовательно соединенный с обмоткой 1,- силовой ключ 22 (,2, ...,п-1,п) с входами отпирания и запирания. Силовые ключи могут быть выполнены на тиристорах.
Каждый из входов отпирания ключей
Каждый из датчиков 9, 10.1,10.2, ...,10j, , 10.,, 11 подключен к инвертирующим входам своих компараторов
20 и 21, Датчик 8 подключен к инвертирующему входу своего компаратора 20. Неинвертирующие входы всех компараторов 20 и 21 связаны с положительными полюсами источников опорных
напряжений соответственно U и И.
Выходы всех компараторов. 20 через формирователи 19 связаны с входами запирания всех ключей 22- (,2,..., п-1,п). Кроме того, каждый из выходов
компараторов 20 датчиков 10.2, 10j3, ...10.7 , 10„, через элемент НЕ 18 связан с первыми входами элементов И 17 соответственно 22.2 и 22.3, 22.3 и 22.4,...,22., и 22„., , 22 „,, и 22 „
ключей, выходы компараторов 20 датчиков 10.1 и 9 через элементы НЕ 18. связаны с первыми входами элементов И 17 ключей соответственно 22 , и 22 ,. Каждый из выходов компараторов 21 датчиков 10.2, 10.3,.. ., 10.з , 10 ,, через формирователь 19 связан с вторыми входами элементов И 17 соответственно 21.1 и 22.4, 22.2 И 22.5,..., 22j,. и 22.,, 22 и 22„ ключей, выходы компараторов 21 датчиков 10.1 0, 9 и 11 через формирователи 19 связаны с вторыми входами элементов И 17 соответственно 22.3, 22,, 22,,., и 22 h ключей.
Датчики 8,9,10.1, 10.2,..., 10 , 10,,,, 11 установлены на направляющей 4, идентичны и представляют собой датчики трансформаторного типа с разомкнутым магнитопроводом, каждый из которых выдает сигнал Ujj при нахождении бойка 5 вне зоны этого датчика, U|j при замыкании его магнитопровода частью бойка 5, имеющей проточку, и и01 при замыкании его магнитопровода частью бойка 5, не имеющей проточки. Выходные сигналы и 4, и Vчг по длительности равны времени замыкания магни топровода датчика частью бойка 5, со
ответственно имеющей проточку и не имеюр|ей проточки.
Кроме того, при замыкании магнито- провода каждого датчика 10.1, 10.2, ... ,, датчика 9, частью бойка 5 как имеющей проточку, так и не имеющей ее, на выходе каждого элемента НЕ 18 появляется сигнал 1. Длительность этого сигнала равна времени прохождения бойка 5 в зоне датчика.
Сигналы Ujjj, Up, j и 0j всегда имеют положительные значения, причем
UDO и, Up, и, ид,.
Все датчики, за исключением датчиков 11 и 12 размещены симметрично относительно обмоток 1 (,2,...,п- -1,п).
Все формирователи 19 идентичны и предназначены для создания импульсов малой длительности по сравнению с длительностью сигналов U, и Up.
Для пуска устройства служит выключатель 23, установленный в цепи питания ifflj датчика 12.
Устройство работает следующим образом.
Пусть, например, в исходном состоянии устройства боек 5, контактирующий с хвостовиком 6, занимает начальное положение А (фиг.2). При этом он находится под полюсами 14 датчика 12 на которых установлены обмотки 15 возбуждения, а хвостовик 6 - под полюсами 14, на которых установлены выходные обмотки 16 (фиг.4). Находясь в положении А, боек 5 замыкает магни- топроводы датчиков 8, 10.1 и 12. Причем магнитопровод датчика 8 замыкается частью бойка, имеющей проточку. После замыкания выключателем 23 цепи питания и датчика 12 (обмоток 15 возбуждения)с выходных обмоток 16, . с датчика 12 снимается сигнал, который через связанный с ним форми рователь 19 поступает на вход отпирания ключа 22.2 и отпирает его. По обмотке 1.2 начинает протекать ток и боек 5 начинает втягиваться этой обмоткой. По мере втягивания боек 5 проходит расстояние 1(у,ин равное в данном случае рабочему зазору обмотки 1.2, и достигает конца этой обмотки. В этот момент происходит размыкание магнитопровода датчика 8 частью бойка 5, имеющей проточку, и уменьщение его сигнала от U-p, до Ujjj. Это приводит к появлению на выходе компаратора 20, связанного с этим датчиком, сигнала 1, который после формирователя 19 в виде короткого импульса поступает на входы запирания всех ключей 22 (,2,...,п-1,п). Ключ 22.2 запирается и обмотка 1.2 отключается. При этом оставшаяся энергия магнитного поля обмотки 1.2 рассеивается в разрядной цепи, подключенной параллельно этой обмотке, а боек 5 продолжает двигаться по инерции (разрядные цепи не показаны).
Двигаясь по инерции, боек 5 передJ ней частью, имеющей проточку, замыкает магнитопровод датчика 10.2, при этом его сигнал увеличивается от U-. до Ujj , что влечет за собой появление на выходе компаратора 20, связанного
0 с этим датчиком, сигнала О, который, инвертируясь в элементе НЕ 18, поступает на первые входы элементов И 17 ключей 22.2 и 22.3, а затем боек 5 задней частью, не имеющей проточки,
5 размыкает магнитопровод датчика 10.1. В это время боек 5 внедряется в обмотку 1.3 на глубину IH и расстояние между передним торцом бойка 5 и концом этой обмотки становится равным мо(ке сигнал датчика 10.1 в .это время уменьшается от Ujjj до Ujj. Последнее приводит к появлению на выходе компаратора 21, связанного с 10.1, сигнала 1, который после формирователя 19 в виде короткого импульса проходит через открытый элемент И 17 и поступает на вход отпира - ния ключа 22.3. Последний отпирается, по обмотке 1.3,начинает протекать ток и боек 5 втягивается этой обмоткой.
По мере втягивания боек 5 проходит расстояние F, и достигает конца обмотки. В этот момент происходит размыкание магнитопровода датчика 10.1 задней частью бойка 5, имеющей прот - точку, и уменьшение его сигнала от Ujj, до и DO. Это приводит к появлению на выходе компаратора 20, связанного с этим датчиком, сигнала, который после формирователя 19 в виде короткого импульса поступает на входы запирания всех ключей-22, (,2,.... п-1,п). Ключ 22.3 запирается и обмотка 1.3 отключается, а боек 5 продолжает двигаться по инерции.
Двигаясь по инерции, боек 5 передней частью, имеющей проточку, замыкает магнитопровод датчика 10.3 и описанные процессы повторяются.
0
5
0
5
0
Продолжая движение вверх, как под действием электромагнитных сил, действующих последовательно со стороны оставшихся обмото, так и по инерции в промежутках отсутствия названных сил, боек 5 в определенный момент времени достигает своего крайнего верхнего положения и останавливается заканчивая обратный (холостой) ход. Затем под действием силы тяжести боек 5 начинает движение .в обратную сторону, совершая прямой (рабочий) ход и в определенный момент времени задней частью, не имекяцей проточки, размыкает магнитопровод датчика 11 (это положение бойка 5 на фиг.2 обозначено через В). В это- время боек 5 внедрился в обмотку 1р на глубину 1 и расстояние между передним тор- цем бойка 5 и концом этой обмотки стало равным э сигнал датчика
Iв это -время уменьшается от Uj до Up, Последнее приводит к появлению
на выходе компаратора 21, связанного с датчиком 11, сигнала 1, который после формирователя 19 в виде корот-, кого импульса проходит через открыты второй элемент И 17 и поступает на вход отпирания ключа 22р. Последний отпирается, по обмотке 1п начинает протекать ток и боек 5 начинает втягиваться этой обмоткой.
По мере втягивания боек 5 проходи расстояние и достигает конца этой обмотки. В этот момент происхо- дит размыкание магнитопровода датчик
IIчастью бойка 5, имеющей проточку, и уменьшение его сигнала от U д, до
Uij.. Это приводит к появлению на вы
ходе компаратора 20, связанного с этим датчиком, сигнала, который посл формирователя 19 в виде короткого импульса поступает на входы запирания всех ключей 22 ( (,2,.,. ,п-1 ,п) . Ключ 22 запирается и обмотка 1 отключается, а боек 5 продолжает двигаться вниз по инерции и под действием силы тяжести.
Двигаясь вниз, боек 5 передней частью, имеющей проточку, замыкает магнитопровод датчика 10 n-i и описанные процессы, повторяются с той лишь разницей, что ключи 22,- (,2,..., п-2) отпираются через другие элемент И 17,
Продолжая свое движение, боек 5 в конце рабочего хода наносит удар
Q , 0
5 о
0
0
по хвостовику 6 инструмента 7, производя при этом полезную работу, снова замыкает магнитопровод датчика 12 фиксации, и описанный цикл работы устройства -повторяется.
В электромагнитных приводах ударного действия датчики положения бойка размещаются на направляющей и, следовательно, подвергаются ударным и вибрационным нагрузкам. Поэтому уменьшение количества датчиков положения в предложенном устройстве « в 2 раза повышает надежность его работы,уменьшает габаритную длину и материалоемкость, упрощается конструкция устройства, его изготовление и сборка, уменьшается расход обмоточных материалов. При этом сохраняется высокая точность поддержания эффективного режима работы электромагнитного привода и регулирование энергии и частоты ударов- изменением питающего напряжения.
Формула изобретения
Электромагнитный привод ударного действия, содержащий электромагнитный двигатель, включающий п обмоток, ус тановленных с постоянным шагом на вертикальной немагнитной направляющей, внутри которой расположен ферромагнитный боек, отношение длины которого к шагу обмоток больше единицы, но меньше двух, и который в нижнем положении контактирует торцом с ферромагнитным хвостовиком инструмента, при этом другой его торец -расположен внутри второй снизу обмотки, и (п+2) датчиков, расположенных на немагнит ной направляющей с шагом, равным шагу обмоток, при этом нижний датчик установлен ниже низшей катушки на расстоянии, равном длине бойка, от верхнего торца второй снизу катущки, и датчик фиксации контакта бойка с хвостовиком инструмента, и блок управления, включающий коммутатор с каналами по числу обмоток, каждый из которых содержит последовательно соединенный с обмоткой ключ с входами отпирания и запирания, два формирователя коротких импульсов, кроме того, каналы первой и второй снизу обмоток содержат по элементу 2И, канал второй снизу обмотки содержит также элемент НЕ, каждьш 1-канал, где , содержит дополнительно второй элемент
-ь АЧfff V,
3, ЗГfua.S
15
шигл
| Авторское свидетельство СССР 1179512, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1352607A1 |
