Изобретение относится к управлению электрическими машинами и может быть использовано при разработке электромагнитных молотов большой Мощности.
1|ель изобретения - рас0шрение диапазона регулирования частоты и энергии ударов и упрощение привода.
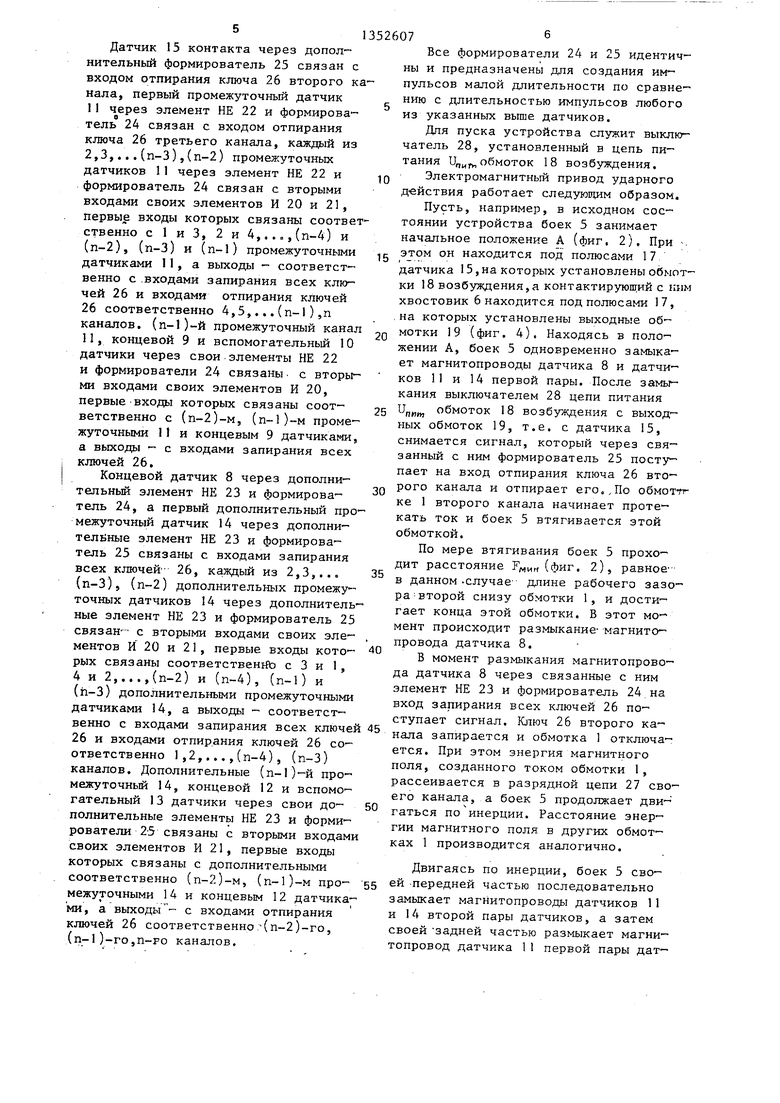
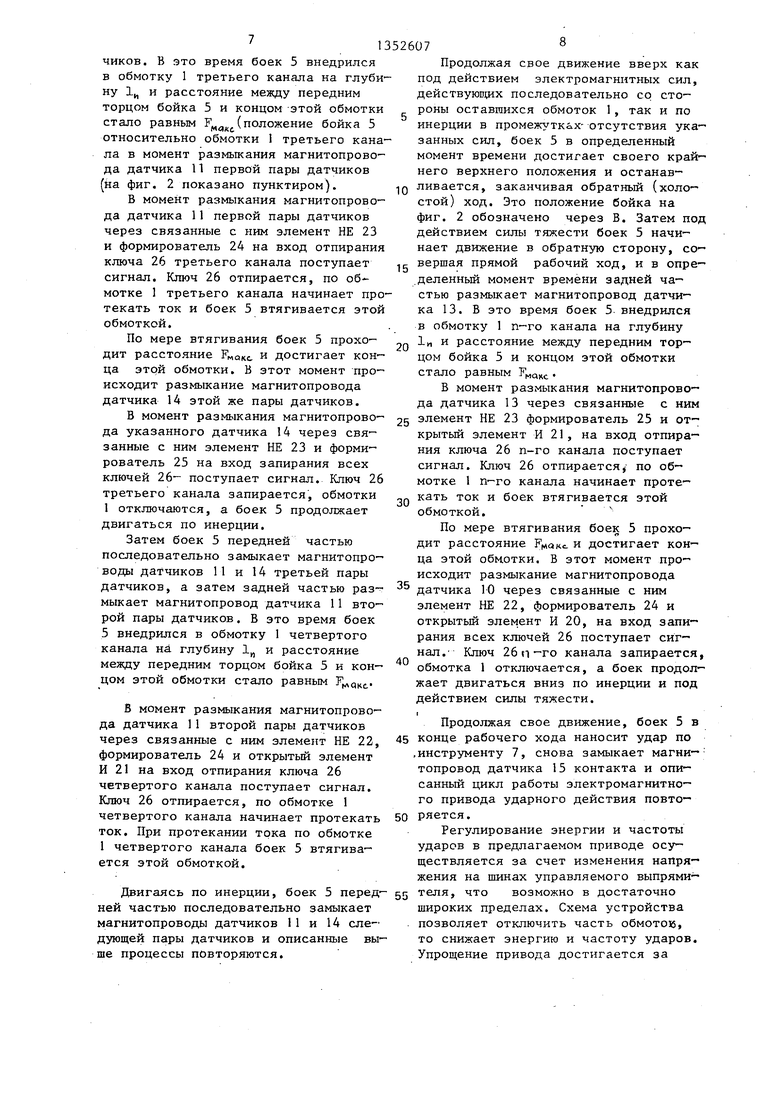
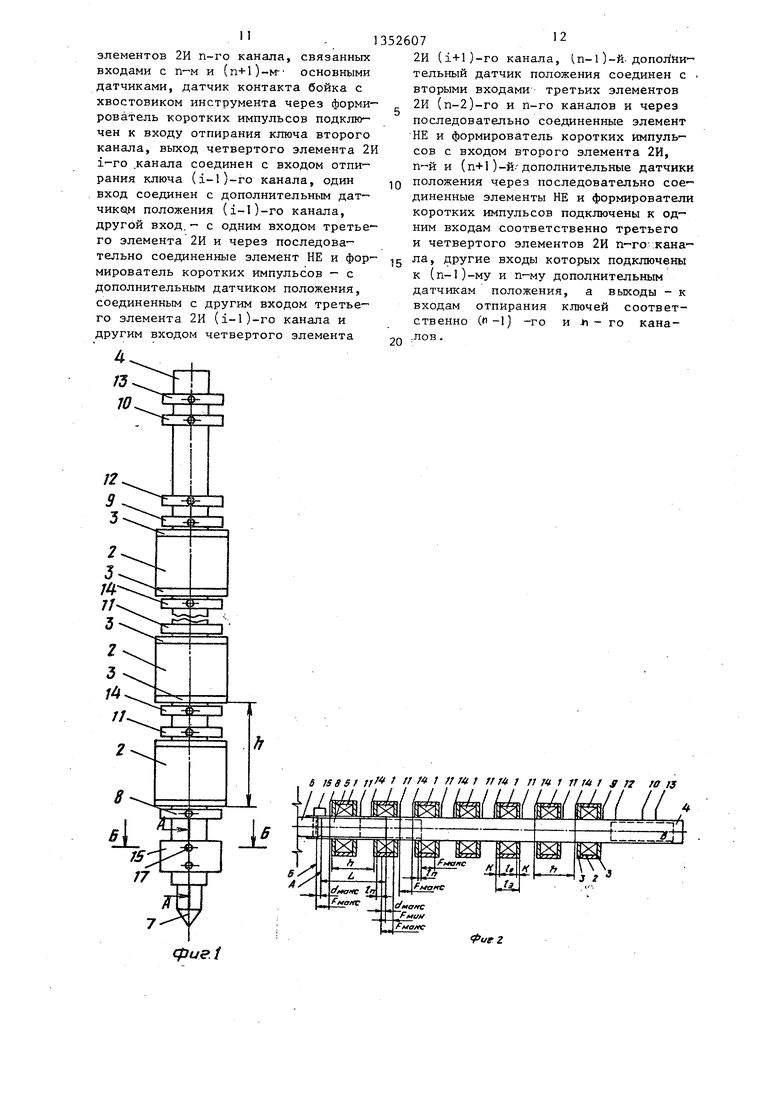
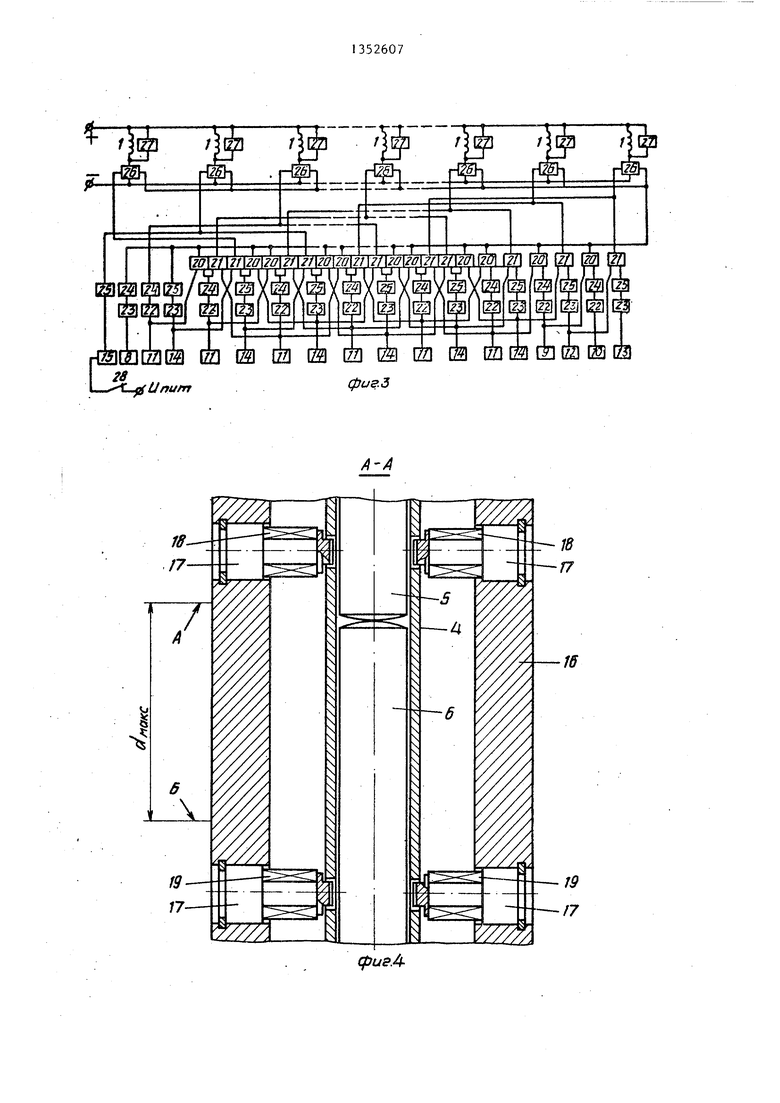
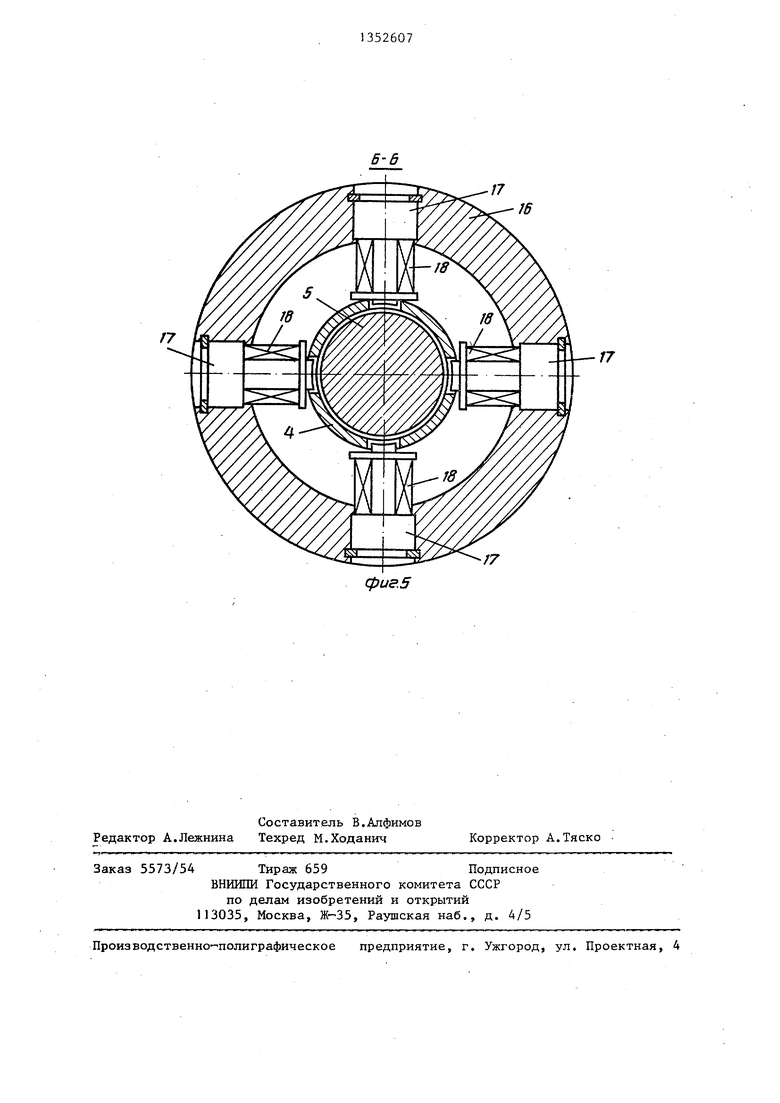
На фиг, 1 схематично показан электромагнитный делитель; на фиг,2- то же, продольный разрез-;.на фиг,3- функциональная схема электромагнитного привода ударного действия; на фиг, А г- разрез А-А на фиг. 1 (про- дольньй разрез датчика контакта бойка с хвостовиком инструмента); на фиг. 5 - разрез Б-Б на фиг, 1 (поперечный разрез датчика фиксации соприкосновения бойка с хвостовиком инструмента),
Электромагнитный привод ударного действия включает электромагнитный двигатель: и устройство управления этим двигателем.
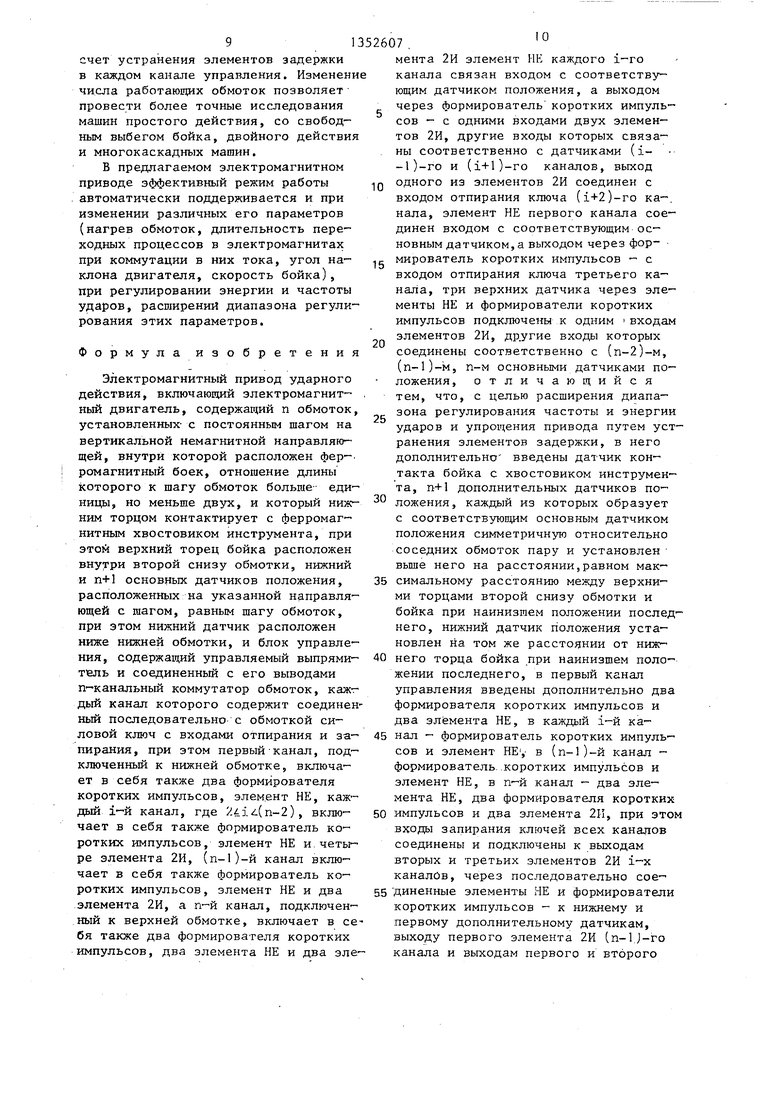
Электромагнитный двигатель содержит (фиг, 1 и 2) п силовых обмоток 1, Jкaждaя из которых имеет одну и ту же длину и заключена в магнитопро вод, состоящий из цилиндрического ярма 2,- закрытого с торцов полюсами, выполненными в форме фланцев 3 толщиной К, Обмотка 1, заключенная в магнитопровод, представляет собой ци линдричеЬкий электромагнит длиной 1з 1о+2К,
Обмотки 1 (электромагниты) установлены на вертикальной немагнитной направляющей 4 с постоянным шагом h. Внутри направляющей 4орасположен ферромагнитный боек 5, отношение длины L которого к шагу h обмоток 1 больше единицы, но меньше двух,т.е, боек 5 имеет длину, большую шага обмоток 1, но меньшую двух шагов. Боек 5 нижним торцом контактирует с фер- ромагнитньм хвостовиком 6 инструмента 7, при этом верхний торец бойка 5 расположен внутри второй снизу обмотки 1. Между этим торцом бойка 5 и верхним торцом второй снизу обмотки 1, т,е, концом этой обмотки, образован рабочий зазор, величина которого может изменяться в пределах
от минимального F,
мин
до максимального F значений, определяемых соответственно начальным А и конечным Б наинизшим положениями бойка
5
0
0
5, т,е. определяе1-1ых максимальным изменением хода d,a бойка 5,
Максимальное изменение хода , бойка зависит от назначения электромагнитного привода ударного действия и задается при его конструировании. Предлагаемый электромагнитный привод ударного действия после установки его на податчике- (не показан) можно использовать для отбойки крепких горных пород (руды), в этом случае задается порядка 50 мм, а при использовании этого привода в качестве электромагнитного сейсмоисточника с предварительньм поджатием излучающей плиты d, задается порядка 30 мм.
При нахождении бойка 5 в конечном положении Б его верхний торец, расположенный внутри второй снизу обмотки 1, находится от нижнего торца этой обмотки на расстоянии 1„, называемом глубиной пр.едварительно5 г о внедрения бойка в обмотку (1„ - минимальная глубина предварительного внедрения бойка 5 во вторую снизу обмотку 1, при которой боек 5 еще втягивается в эту обмотку при пропускании по ней тока,
При нахождении бойка 5 в начальном положении А глубина его предварительного внедрения в эту же обмотку 1 равна . Для электромагнитных молотов 1ц, (0,25-0,4)1 . Оп5 тимальным является включение обмотки именно в момент, когда предварительное внедрение бойка в обмотку . как при рабочем, так и при холостом ходе равно 0,25 1о. Это.условие в предлагаемом приводе не выполняется только при включении второй снизу катушки во время холостого хода, так как в это время положение бойка задано положением инструмента,
5 :
Кроме того, электромагнитный двигатель содержит нижний и (п+1) основных трансформаторных датчиков положения бойка 5, один из которых .
0 установлен ниже, а другой - вьш1е всех обмоток 1 и которые являются соответственно нижним 8 и верхним 9 концевыми датчиками. Один датчик установлен выше верхнего концевого
5 датчика 9 и является вспомогательным датчиком 10, остальные (п-1) датчиков установлены между обмотками 1 и являются промежуточными датчиками 1 1. Расстояние между соседними дат0
- 1
чинами П, а также расстояние между (n-l)-M (верхним) датчиком II и датчиком 9 и расстояние между датчиками 9 и 10 равны шагу h обмоток. В электромагнитный двигатель введены также (п+1) .дополнительных трансформаторных датчиков положения бойка 5, из которых два, например датчики 12 и 13, являются дополнительными соответственно верхним концевым и вспомогательным датчиками и установлены на расстоянии вьпче соответственно датчиков 9 и 10, остальные (n-l) датчиков, например дополнительные промежуточные датчики 14, установлены между обмотками 1, т.е. между обмотками 1 двигателя на расстоянии, равном максимальному рабочему зазору JJ,o,j, от каждого промежуточного датчика 11 установлен дополнительный промежуточный датчик 14, при этом расстояние между соседними датчиками 14 равно шагу h обмоток 1 Нижний концевой датчик 8 установлен от нижнего (первого) дополнительно- - го промежуточного датчика 14 на рас
ниже датчика 8 контакта бойка
стоянии, равно Diary h обмоток 1.
На направляющей 4 установлен датчик 15 5с хвостовиком 6.
Датчик 15 содержит (фиг..4 и 5) ферромагнитный полый цилиндр .16 и две идентичные системь съемных полюсов 17, каждая из которых содержит по четыре указанных полюса 17, расположенных в одной плоскости под прямым углом друг к другу. Расстояние между плоскостями, в которых расположены полюса 17 первой и второй систем, выбрано несколько большим максимального изменения хода ка 5 (фиг. 2 и 4).
мокс бойТаким образом, полюса 17 первой системы расположены в зоне движения бойка 5, а полюса 17 второй системы в зоне хвостовика 6. На фиг. 4 показано промежуточное между А и Б положение бойка 5. На полюсах 17 первой системы установлены обмотки 18 возбуждения, а на полюсах 17 второй системы - выходные обмотки 19. Обмотки 18 возбуждения подключены к источнику переменного напряжения, а выходные обмотки 19 соединены между собой последовательно так, что их сигналы суммируются. С выходных обмоток 19 снимается сигнал только при контакте бойка 5 с хвостовиком 6.
5
0
5
0
5
0
Датчики 11 и 14, расположенные между одними и теми же обмотками 1, образуют пару датчиков. Первая пара датчиков 11 и 14 расположена между первой снизу и второй обмотками 1, вторая - между второй и третьей обмотками 1, третья - между третьей и
четвертой обмотками 1 и т.д. (п-1)-я пара датчиков 11 и 14 расположена между (п-1)-йип-й обмотками 1.
Образовавшиеся пары промежуточных датчиков размещены симметрично относительно обмоток 1.
Датчики 9, 12 и 10, 13 образуют соответственно п-ю и (п+1)-ю пары датчиков. Датчик 11 (п-1)-й пары и датчик 12, а также датчик 14 (n-l)-и пары и датчик 9 расположены симметрично относительной п-и обмотки 1.
Датчик 8 и датчик 11 первой пары расположены симметрично относительно первой обмотки 1.
Расстояние от нижнего торца бойка 5 (при нахождении последнего в положении Б) до датчика 8 равно 5 а до датчика 11 первой пары датчиков равно шагу h обмоток 1.
Установленнь:е на направляющей 4 датчики 8-14 идентичны и представляют собой датчики трансформаторного типа с разомкнутым магнитвпроводом, которые выдают сигналы при замыкании их магнитопровода ферромагнитным бойком 5. Выходной сигнсШ любого из указанных датчиков по длительности равен времени прохождения бойка мимо этого датчика.
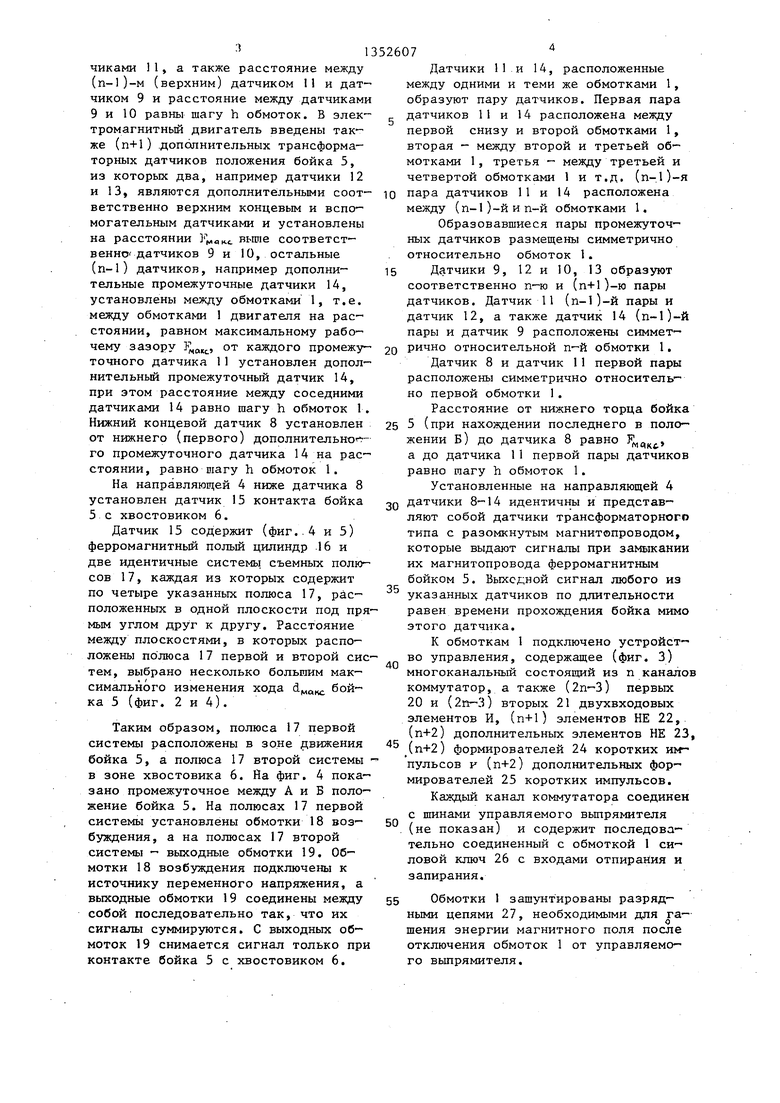
К обмоткам 1 подключено устройство управления, содержащее (фиг. З) многоканальный состоящей из п каналов коммутатор, а также (2п-3) первьпс 20 и (2п-3) вторых 21 двухвходовых элементов И, (п+1) элементов НЕ 22, (п+2) дополнительных элементов НЕ 23, (п+2) формирователей 24 коротких импульсов и (п+2) дополнительных формирователей 25 коротких импульсов.
Каждый канал коммутатора соединен с шинами управляемого вьшрямителя . (не показан) и содержит последовательно соединенный с обмоткой 1 силовой ключ 26 с входами отпирания и запирания.
5 Обмотки 1 зашунтированы разрядными цепями 27, необходимыми для гашения энергии магнитного поля после
энергии отключения обмоток го выпрямителя.
1 от управляемо-
Датчик 15 контакта через дополнительный формирователь 25 связан с входом отпирания ключа 26 второго канала, первый промежуточный датчик 11 через элемент НЕ 22 и формирователь 24 связан с входом отпирания ключа 26 третьего канала, каждый из 2,3,...(п-З),(п-2) промежуточньк датчиков 11 через элемент НЕ 22 и формирователь 24 связан с вторыми входами своих элементов И 20 и 21, первые входы которых связаны соответственно с 1 и 3, 2 и 4,,.„,(п-4) и (п-2), (п-З) и (п-1) промежуточными датчиками 11, а выходы - соответственно с .входами запирания всех ключей 26 и входами отпирания ключей 26 соответственно 4,5,...(п-1),п каналов, (п-1)-й промежуточный канал П, концевой 9 и вспомогательный 10 датчики через свои элементы НЕ 22 и формирователи 24 связаны. с вторыми входами своих элементов И 20, первые входы которых связаны соответственно с (п-2)-м, (n-l)-M промежуточными 11 и концевым 9 датчиками, а выходы - с входами запирания всех ключей 26.
Концевой датчик 8 через дополни- тельньй элемент НЕ 23 и формирователь 24, а первый дополнительный промежуточный датчик 14 через дополнительные элемент НЕ 23 и формирователь 25 связаны с входами запирания всех ключей- 26, каждый из 2,3,... (п-З), (п-2) дополнительных промежуточных датчиков 14 через дополнительные элемент НЕ 23 и формирователь 25 связан- с вторыми входами своих эле- ментов И 20 и 21, первые входы кото- рых связаны соответственйЬ с 3 и 1,
4 и 2(п-2) и (п-4), (п-1) и
(п-З) дополнительными промежуточными датчиками 14, а выходы - соответственно с входами запирания всех ключе 26 и входами отпирания ключей 26 соответственно 1,2,...,(п-4), (п-З) каналов. Дополнительные (п-Г)-и промежуточный 14, концевой 12 и вспомогательный 13 датчики через свои до- полнительные элементы НЕ 23 и формирователи 2-5 связаны с вторыми входам своих элементов И 21, первые входы которых связаны с дополнительными соответственно (п-2)-м, (п-1)-м про- межуточными 14 и концевым 12 датчика ми, а выходы - с входами отпирания ключей 26 соответственно )-го, (п-1)-го5П-Ро каналов.
5
0
5
0
5 О
5 5
Все формирователи 24 и 25 идентичны и предназначены для создания импульсов малой длительности по сравнению с длительностью импульсов любого из указанных выше датчиков.
Для пуска устройства служит выключатель 28, установленный в цепь питания U j обмоток 18 возбуждения.
Электромагнитный привод ударного д-ействия работает следующим образом.
Пусть, например, в исходном состоянии устройства боек 5 занимает начальное положение А (фиг. 2). При -- этом он находится под полюсами 17, датчика 15, на которых установлены обмотки 18 возбуждения,а контактирующий с ним хвостовик 6 находится под полюсами 17, ,на которых установлены выходные обмотки 19 (фиг. 4), Находясь в положении А, боек 5 одновременно замыкает магнитопроводы датчика 8 и датчиков 11 и 14 первой пары. После замыкания выключателем 28 цепи питания и„„ обмоток 18 возбуждения с выходных обмоток 19, т.е. с датчика 15, снимается сигнал, который через связанный с ним формирователь 25 посту пает на вход отпирания ключа 26 второго канала и отпирает его.,По обмот-п- ке 1 второго канала начинает протекать ток и боек 5 втягивается этой обмоткой.
По мере втягивания боек 5 проходит расстояние (фиг. 2), равное-- в данном .случае- длине рабочего зазора--второй снизу обмотки 1, и достигает конца этой обмотки. В этот мо- мент происходит размыкание- м-агнито- провода датчика 8. В момент размыкания магнитопрово- да датчика 8 через связанные с ним элемент НЕ 23 и формирователь 24 на вход запирания всех ключей 26 поступает сигнал. Ключ 26 второго канала запирается и обмотка 1 отключается. При этом энергия магнитного поля, созданного током обмотки 1, рассеивается в разрядной цепи 27 своего канала, а боек 5 продолжает дви- гаться по инерции. Расстояние энергии магнитного поля в других обмотках 1 производится аналогично.
Двигаясь по инерции, боек 5 своей -передней частью последовательно замыкает магнитопроводы датчиков 11 и 14 второй пары датчиков, а затем своей -задней частью размыкает магни- топровод датчика 11 первой пары дат-
1
чиков. в это время боек 5 внедрился в обмотку 1 третьего канала на глубину Ij, и расстояние между передним торцом бойка 5 и концом этой обмотки стало равным F (положение бойка 5 относительно обмотки 1 третьего канала в момент размыкания магнитопрово- да датчика 11 первой пары датчиков (йа фиг. 2 показано пунктиром).
В момент размыкания магнитопрово- да датчика 11 первой пары датчиков через связанные с ним элемент НЕ 23 и формирователь 24 на вход отпирания ключа 26 третьего канала поступает сигнал. Ключ 26 отпирается, по об мотке 1 третьего канала начинает протекать ток и боек 5 втягивается этой обмоткой.
По мере втягивания боек 5 проходит расстояние Рмак.с, и достигает конца этрй обмотки. В этот момент происходит размыкание магнитопровода датчика 14 этой же пары датчиков.
В момент размыкания магнитопрово- 25 элемент НЕ 23 формирователь 25 и открытый элемент И 21, на вход отпирания ключа 26 п-го канала поступает сигнал. Ключ 26 отпирается по обмотке 1 п-го канала начинает протекать ток и боек втягивается этой обмоткой.
По мере втягивания боек 5 проходит расстояние . и достигает конца этой обмотки. В этот момент происходит размыкание магнитопровода
да указанного датчика 14 через связанные с ним элемент НЕ 23 и формирователь 25 на вход запирания всех ключей 26- поступает сигнал. Ключ 26 третьего канала запирается, обмотки 1 отключаются, а боек 5 продолжает двигаться по инерции.
Затем боек 5 передней частью последовательно замыкает магнитопро- воды датчиков 11 и 14 третьей пары
30
датчиков, а затем задней частью раз- 35 датчика 10 через связанные с ним
мыкает магнитопровод датчика 11 второй пары датчиков. В это время боек 5 внедрился в обмотку 1 четвертого канала на глубину 1„ и расстояние между передним торцом бойка 5 и концом этой обмотки стало равным .
В момент размыкания магнитопровода датчика 11 второй пары датчиков через связанные с ним элемент НЕ 22, формирователь 24 и открытый элемент И 21 на вход отпирания ключа 26 четвертого канала поступает сигнал. Ключ 26 отпирается, по обмотке 1 четвертого канала начинает протекать ток. При протекании тока по обмотке 1 четвертого канала боек 5 втягивается этой обмоткой.
жения на шинах управляемого выпрямиДвигаясь по инерции, боек 5 перед- 55 теля, что возможно в достаточно
ней частью последовательно замыкает магнитопроводы датчиков 11 и 14 следующей пары датчиков и описанные выше процессы повторяются.
Продолжая свое движение вверх как под действием электромагнитных сил, действуюищх последовательно со стороны оставшихся обмоток 1, так и по инерции в промежутках- отсутствия указанных сил, боек 5 в определенный момент времени достигает своего крайнего верхнего положения и останавливается, заканчивая обратный (холостой) ход. Это положение бойка на фиг. 2 обозначено через В. Затем под действием силы тяжести боек 5 начинает движение в обратную сторону, совершая прямой рабочий ход, и в определенный момент времени задней частью размыкает магнитопровод датчика 13. В это время боек 5 внедрился в обмотку 1 п-го канала на глубину 1и и расстояние между передним торцом бойка 5 и концом этой обмотки стало равным F .
В момент размыкания магнитопровода датчика 13 через связанные с ним
25
30
элемент НЕ 22, формирователь 24 и открытый элемент И 20, на вход запирания всех ключей 26 поступает сигнал. Ключ канала запирается, обмотка 1 отключается, а боек продолает двигаться вниз по инерции и под ействием силы тяжести.
Продолжая свое движение, боек 5 в конце рабочего хода наносит удар по инструменту 7, снова замыкает магни- топровод датчика 15 контакта и описанный цикл работы электромагнитного привода ударного действия повторяется.
Регулирование энергии и частоты ударов в предлагаемом приводе осуществляется за счет изменения напря-
широких пределах. Схема устройства позволяет отключить часть обмоток, то снижает энергию и частоту ударов. Упрощение привода достигается за
счет устранения элементов задержки в каждом канапе управления. Изменени числа работающих обмоток позволяет провести более точные исследования машин простого действия, со свободным выбегом бойка, двойного действия и многокаскадных машин,
В предлагаемом электромагнитном приводе эффективный режим работы автоматически поддерживается и при изменении различных его параметров (нагрев обмоток, длительность переходных процессов в электромагнитах при коммутации в них тока, угол наклона двигателя, скорость бойка), при регулировании энергии и частоты ударов, расБШрений диапазона регулирования этих параметров.
Формула изобретения
Электромагнитный привод ударного действия, включающий электромагнит- ный двигатель, содержаний п обмоток установленных- с постоянным шагом на вертикальной немагнитной направляющей, внутри которой расположен ферромагнитный боек, отношение длины которого к шагу обмоток больше единицы, но меньше двух, и который нижним торцом контактирует с ферромагнитным хвостовиком инструмента, при этом верхний торец бойка расположен внутри второй снизу обмотки, нижний и п+1 основных датчиков положения, расположенных на указанной направляющей с шагом, равным шагу обмоток, при этом нижний датчик расположен ниже нижней обмотки, и блок управления, содержащий управляемый выпрямитель и соединенный с его выводами п-канапьный коммутатор обмоток, каждый канал которого содержит соединенный последовательно с обмоткой силовой ключ с входами отпирания и запирания, при этом первый-канал, подключенный к нижней обмотке, включает в себя также два формирователя коротких импульсов, элемент НЕ, каждый, 1-й канал, где 24ii(n-2), включает в себя также формирователь коротких импульсов, элемент НЕ и четыре элемента 2И, (п-1)-й канал включает в себя также формирователь коротких импульсов, элемент НЕ и два элемента 2И, а п-и канал, подключенный к верхней обмотке, включает в себя также два формирова-геля коротких импульсов, два элемента НЕ и два эле
5
0
5
0
мента 2И элемент Н каждого 1-го канала связан входом с соответствующим датчиком положения, а выходом через формирователь коротких импульсов - с одними входами двух элементов 2И, другие входы которых связаны соответственно с датчиками (i- -1)-го и (i+l)-ro каналов, выход одного из элементов 2И соединен с входом отпирания ключа ()-ro ка-, нала, элемент НЕ первого канала соединен входом с соответствующим основным датчиком, а выходом через фор- мирователь коротких импульсов - с входом отпирания ключа третьего канала, три верхних датчика через элементы НЕ и формирователи коротких импульсов подключены к одним входам элементов 2И, др.угие входы которых соединены соответственно с (п-2)-м, (n-l)-M, п-м основными датчиками положения, отличающийся тем, что, с целью расширения диапазона регулирования частоты и энергии ударов и упрощения привода путем устранения элементов задержки, в него дополнительно введены датчик контакта бойка с хвостовиком инструмента, п+1 дополнительных датчиков положения, каждый из которых образует с соответств-ующим основным датчиком положения симметричную относительно соседних обмоток пару и установлен - выше него на расстоянии,равном максимальному расстоянию между верхними торцами второй снизу обмотки и бойка при наинизгаем положении последнего, нижний датчик положения установлен на том же расстоянии от нижнего торца бойка при наинизшем положении последнего, в первый канал управления введены дополнительно два формирователя коротких импульсов и два элемента НЕ, в каждый 1-и ка5 нал - формирователь коротких импульсов и элемент НЕ ,- в (п-1)-й канал - формирователь, .коротких импульсов и элемент НЕ, в п-и канал - два элемента НЕ, два формирователя коротких
0 импульсов и два элемента 211, при этом входы запирания ключей всех каналов соединены и подклю-чены к выходам вторых и третьих элементов 2И i-х каналов, через последовательно сое-
.5 диненные элементы НЕ и формирователи коротких импульсов - к нижнему и первому дополнительному датчикам, выходу первого элемента 2И (n-lj-ro канала и выходам первого и второго
5
0
и .
элементов 2И п-го канала, связанных входами с п-м и (п+1)-м-- основными датчиками, датчик контакта бойка с хвостовиком инструмента через формирователь коротких импульсов подключен к входу отпирания ключа второго канала, выход четвертого элемента 2И i-ro .канала соединен с входом отпирания ключа (i-l)-ro канала, один вход соединен с дополнительным дат- положения (i-l)-ro канала, другой вход, - с одним входом третьего элемента 2И и через последовательно соединенные элемент НЕ и формирователь коротких импульсов - с дополнительным датчиком положения, соединенным с другим входом третьего элемента 2И (i-l)-ro канала и другим входом четвертого элемента
52607 2
2И (i+l)-ro канала, (п-1)-й-дополнительный датчик положения соединен с . вторыми входами третьих элементов 2И (п-2)-го и п-го каналов и череэ последовательно соединенные элемент НЕ и формирователь коротких импульсов с входом второго элемента 2И, п-й и (n+i)-й-дополнительные датчики
1Q положения через последовательно соединенные элементы НЕ и формирователи коротких импульсов подключены к одним входам соответственно третьего и четвертого элементов 2И п-го-.кана с ла, другие входы которых подключены к (п-1)-му и п-му дополнительным датчикам положения, а выходы - к входам отпирания ключей соответственно (1 -1} -го и л - го кана20 -лов.
S 1S8 51 Jj // /« / // /« / ft ги / П 7 f П М f f rZ ГО J3 LJ±/ и I I
( I 11 1ХЧЯ1 III /
tfx:
М f f rZ ГО J3
( I 11 1ХЧЯ1 III /
fftuf г
cpue.i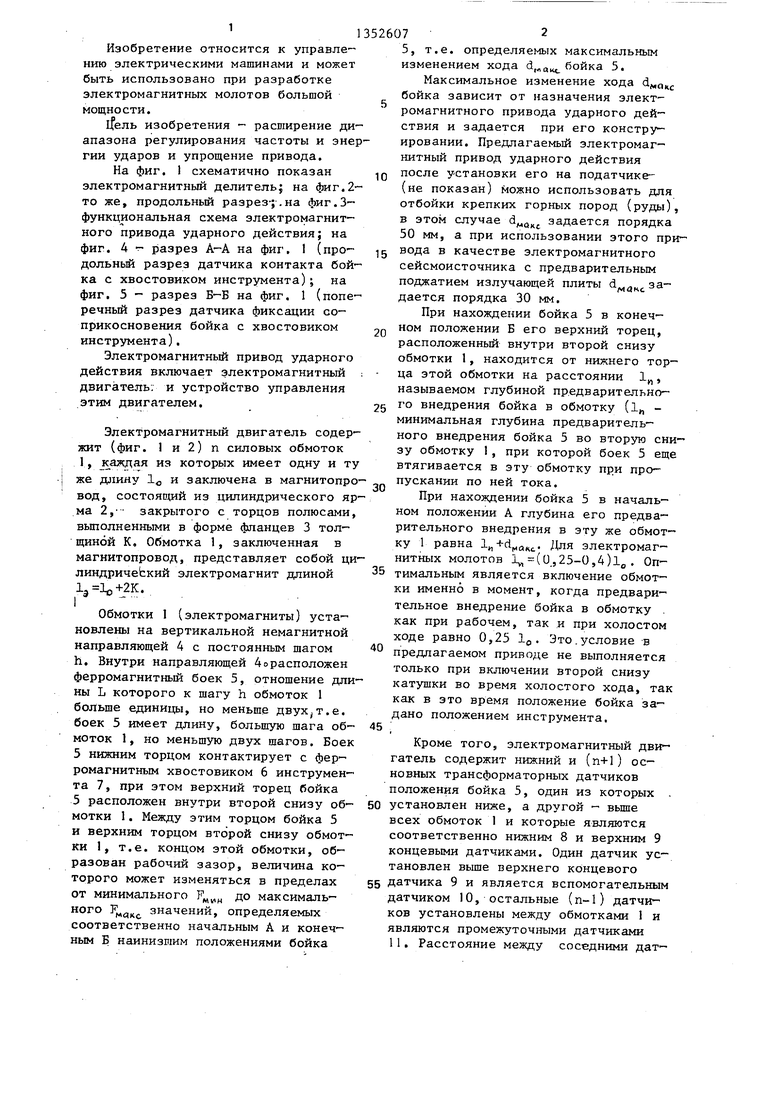
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1987 |
|
SU1495947A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Электромагнитный привод ударного действия | 1988 |
|
SU1624653A1 |
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1982 |
|
SU1053256A1 |
| Устройство для управления силовым транзисторным ключом | 1987 |
|
SU1418865A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1390768A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Устройство для управления реверсивным электродвигателем постоянного тока с электромагнитным тормозом | 1981 |
|
SU1053246A1 |
Изобретение относится к электротехнике и может быть использовано при разработке электромагнитных:;ма- шин ударного действия. Цель состоит в расширении диапазона регулирования частоты и энергии ударов и упрощении привода. Регулирование энергии и частоты ударов осуществляется изменением напряжения на шинах управляемого вентиля, что возможно в достаточно широких пределах, и дополнительной схемой, позволяющей отключить часть обмоток. Упрощение достигнуто за счет устранения элементов задержки в каждом канале управления. Изменение числа работакндих обмоток позволяет провести более точные исследования машин со свободным выбегом бойка. Эффективный режим работы автоматически поддерживается и при изменении различных параметров таких как нагрев обмоток и длительность переходного процесса в электромагнитах при коммутации в них тока. 5 ил. г (Л
(f3u5.4J6
/7
Редактор А.Лежнина
Составитель В.Алфимов Техред М.Ходанич
Заказ 5573/54 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж--35, Раушская наб., д. 4/5
Производственно полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фие.5
Корректор А.Тяско
| Устройство для управления электромагнитной машиной возвратно-поступательного движения | 1982 |
|
SU1053256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1179512, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
