6 и через третий масштабный блок 30 - к первому входу сумматора 5, выход которого соединен с регистрирующим прибором 6. При действии на каток боковой силы ступица 3 пере
Изобретение относится к области испытаний и исследований транспортных средств и может применяться, например, при исследовании криволинейного движения гусеничной машины.
Цель изобретения - повьшение точности измерения.
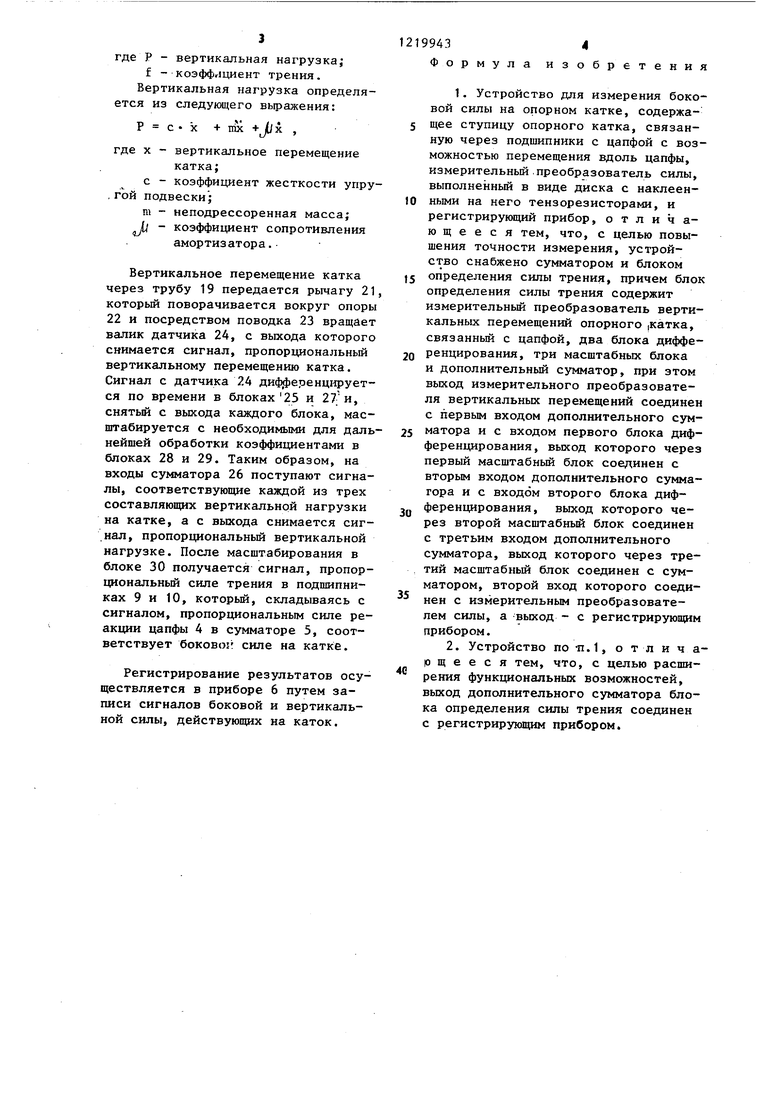
На фиг.1 представлена структурная схема предлагаемого устройства; на фиг.2 - установка измерительного преобразователя силы в каток; на фиг.З - измерительный преобразователь вертикальных перемещений катка.
Устройство содержит измерительный
преобразователь силы 1, блок 2 определения силы трения, ступицу 3, цапфу 4, сумматор 5 и регистрируюп91Й прибор 6. Измерительньй преобразователь 1 силы выполнен в виде силоиз- мерительного элемента 7 в форме диск с наклеенными на нем тензорезистора- ми 8. Силоизмерительный элемент 7 жестко соединен с цапфой 4 посредством радиальньк роликовых подшипников 9 и 10 и втулки 11, затяжка кото рых на цапфе 4 в осевом направлении осуществляется гайкой 12.
На хвостовике силоизмерительного элемента 7 установлен радиальньй шариковый подшипник 13, затяжка кото рого осуществляется посредством гайки 14 и крьш1ки 15. Корпус 16 жестко соединен со ступицей 3 катка, котора связана с цапфой 4 посредством радиальных роликовых подшипников 9 и 10 и крьшпси 15, которая через радиальный шариковый подшипник 17 связана с корпусом 18, на котором жестко установлена труба 19, через которую пропущены провода от тензорезисторов 8. Труба 19 соединена с измерительным преобразователем 20 вертикальных перемещений катка посредством рычага 21, соединенного шарнирно с трубой 19 и вращающегося вокруг неподвиж
мещается в осевом направлении вдоль цапфы 4. При этом боковая сила урав новешнвается силой реакции цапфы 4 и силой трения, возникающей в подшипниках 9 и 10. 1 з.п.ф-лы, 3 ил.
«О
IS
20 25
зо
5
0
ной опоры 22. С рычагом 21 соединен посредством гибкого поводка 23 датчик 24 вертикальных перемещений катка, выходкоторого соединен с входом первого блока 25 дифференцирования и с первьм входом дополнительного сумматора 26. Выход блока 25 дифференцирования соединен с входом второго блока 27 дифференцирования и через масштабный блок 28 - с вторым входом сумматора 26. Выход второго блока 27 дифференцирования через второй масштабный блок 29 соединен с третьим входом сумматора 26, выход которого подключен к регистрирующему прибору 6 и через третий масштабный блок 30 - к первому входу сумматора 5, выход которого соединен с регистрирующим прибором 6.
Устройство работает следующим образом.
При действии на каток боковой силы ступица 3 перемещается в осевом направлении вдоль цапфы 4. При этом боковая сила уравновешивается силой реакции цапфы 4 и силой трения, возникающей в подшипниках 9 и 10.
, где R - сила реакции цапфы;
F,- сила трения в подшипниках. Сила реакции цапфы 4 передается через Силоизмерительный элемент 7, упорный подшипник 13 и корпус 16 на ступицу 3 катка. Деформация силоизмерительного элемента 7 приводит к растяжению или сжатию тензорезисторов 8 и появлению сигнала, пропорционального силе реакции.
Сила трения в подшипниках 9 и 10 зависит от вертикальной нагрузки на катке
F Р . f V/. Р t .
где Р - вертикальная нагрузка;
f - коэффициент трения. Вертикальная нагрузка определяется из следующего выражения:
Р с X + nix + jO X ,
где X - вертикальное перемещение
катка;
с - коэффициент жесткости упру ,гой подвески;
m - неподрессоренная масса; I; - коэффициент сопротивления амортизатора.
Вертикальное перемещение катка через трубу 19 передается рычагу 21 который поворачивается вокруг опоры 22 и посредством поводка 23 вращает валик датчика 24, с выхода которого снимается сигнал, пропорциональный вертикальному перемещению катка. Сигнал с датчика 24 дифференцируется по времени в блоках 25 и 27 и, снятый с выхода каждого блока, масштабируется с необходимыми для дальнейшей обработки коэффициентами в блоках 28 и 29. Таким образом, на входы сумматора 26 поступают сигналы, соответствующие каждой из трех составляющих вертикальной нагрузки на катке, а с выхода снимается сигнал, пропорциональный вертикальной нагрузке. После масштабирования в блоке 30 получается сигнал, пропорциональный силе трения в подшипниках 9 и 10, который, складываясь с сигналом, пропорциональным силе реакции цапфы 4 в сумматоре 5, соответствует боковой силе на катке.
Регистрирование результатов осуществляется в приборе 6 путем записи сигналов боковой и вертикальной силы, действующих на каток.
2199434
Формула изобретения
1.Устройство для измерения боковой силы на опорном катке, содержа5 щее ступицу опорного катка, связанную через подшипники с цапфой с возможностью перемещения вдоль цапфы, измерительный .преобразователь силы, выполненный в виде диска с наклеен10 ными на него тензорезисторами, и регистрирующий прибор, отличающееся тем, что, с целью повышения точности измерения, устройство снабжено сумматором и блоком
15 определения силы трения, причем блок определения силы трения содержит измерительный преобразователь вертикальных перемещений опорного ,катка, связанньш с цапфой, два блока диффе2Q ренцирования, три масштабных блока и дополнительный сумматор, при этом выход измерительного преобразователя вертикальных перемещений соединен с первым входом дополнительного сум5 матора и с входом первого блока дифференцирования, выход которого через первый масштабньш блок соединен с вторым входом дополнительного сумма- гора и с входом второго блока диф, ференцирования, выход которого через второй масштабный блок соединен с третьим входом дополнительного сумматора, выход которого через третий масштабный блок соединен с сумматором, второй вход которого соеди нен с измерительным преобразователем силы, а выход - с регистрирующим прибором.
2.Устройство по TI.1, о т л и ч а- р щ е е с я тем, что, с целью расширения функциональных возможностей, выход дополнительного сумматора блока определения силы трения соединен
с регистрирующим прибором.
13
18
15
Фиг.2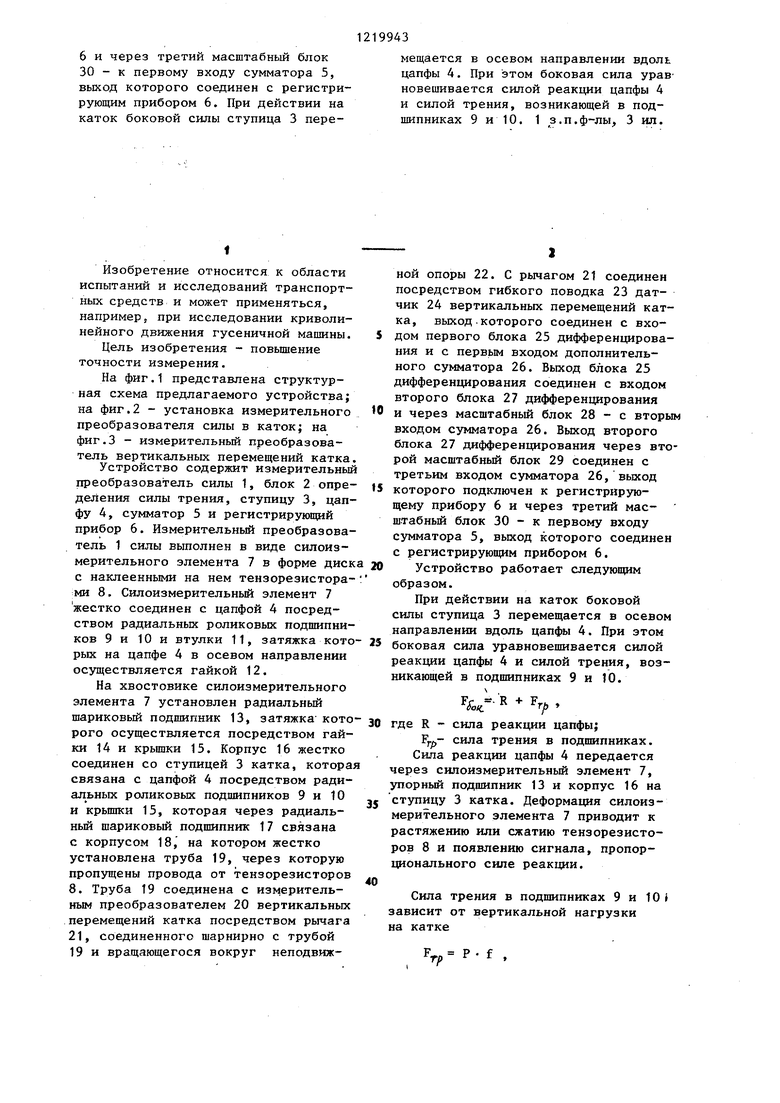
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения знакопеременных боковых сил на колесе транспортного средства | 1989 |
|
SU1730549A1 |
| Устройство для измерения деформации изгиба на вращающихся валах | 1989 |
|
SU1716312A1 |
| Устройство для измерения боковой силыНА КОлЕСЕ ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU847133A1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬ ДАВЛЕНИЯ | 1993 |
|
RU2037145C1 |
| ИЗМЕРИТЕЛЬ ДАВЛЕНИЯ ВЫСОКОТЕМПЕРАТУРНЫХ СРЕД | 1995 |
|
RU2082126C1 |
| Устройство для измерения крутящего момента | 1981 |
|
SU974159A1 |
| Устройство для измерения коэффициента внешнего трения полимерных материалов | 1984 |
|
SU1174836A1 |
| Силоизмерительное устройство | 1990 |
|
SU1728684A1 |
| Устройство для измерения давления щетки на коллектор электрических машин | 1982 |
|
SU1069040A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИАЛЬНЫХ СИЛ, ДЕЙСТВУЮЩИХ НА ВРАЩАЮЩИЕСЯ ВАЛЫ В ПОДШИПНИКАХ | 1991 |
|
RU2019802C1 |

Изобретение относится к области испытаний и исследований транспортных средств при исследовании криволинейного движения гусеничной машины. Цель изобретения - повышение точности измерения. Устройство содержит измерительный преобразователь силы 1, блок 2 определения силы трения, ступицу 3, цапфу 4, сумматор 5 и регистрирукиций прибор 6. Измерительный преобразователь силы 1 вьшолнен в виде силоизмерительного элемента в форме диска с наклеенными на нем тензорезисторами. Корпус жестко соединен со ступицей 3 катка, которая связана с цапфой 4 посредством радиальных роликовых подшипников 9 и 10 и крышкой. Выход блока 25 дифференцирования соединен с входом второго блока 27 дифференцирования и через масштабный блок 28 - с вторым -входом сумматора 26. Выход второго блока 27 через второй масштабный блок 29 соединен с третьим входом сумматора 26, выход которого подключен к регистрируннцему прибору (Л |С со со 4 00
г
//////////(//f
4хК. . X
Фиъ.
гг
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВЫХ СИЛ,ДЕЙСТВУЮЩИХ НА КОЛЕСО ДВИЖУЩЕГОСЯТРАНСПОРТНОГО СРЕДСТВА | 1972 |
|
SU430300A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
