Изобретение относится к сельскохозяйственному машиностроению, а именно к мотовилам жаток зерноуборочных машин.
Цель изобретения - повышение производительности жатки без увеличения потерь урожая.
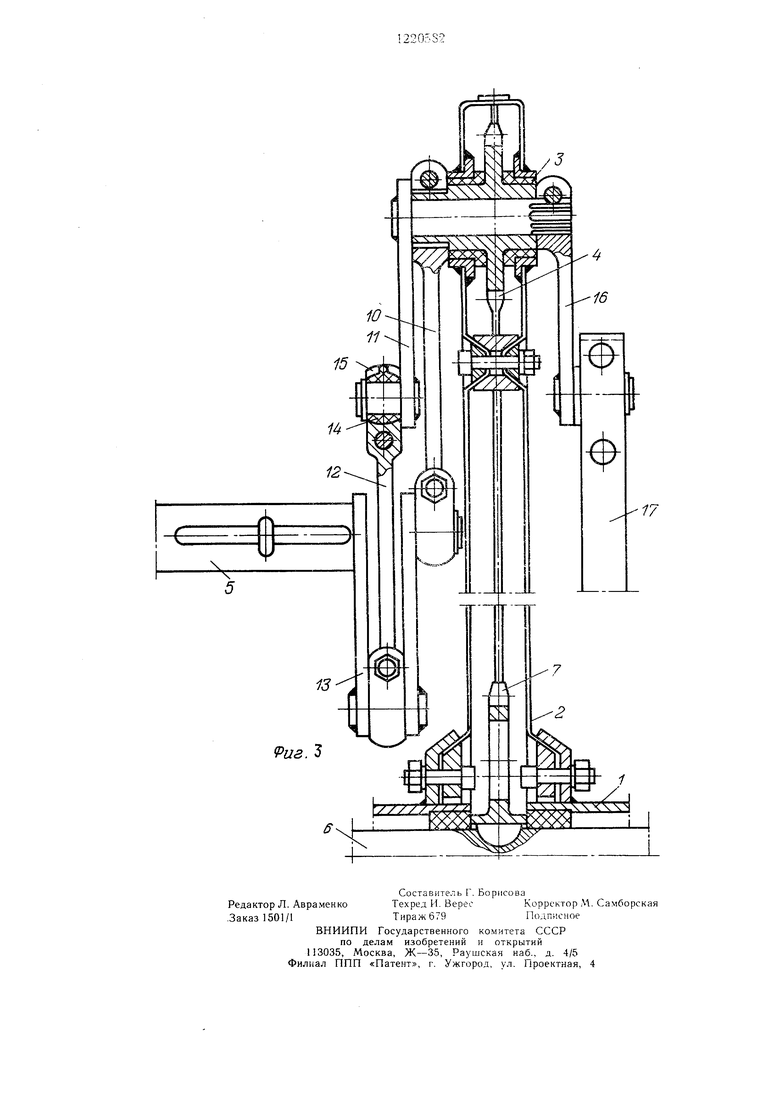
На фиг.1 изображено предлагаемое мотовило,- кинематическая схема в плане; на фиг.2 - то же, вид сбоку; на фиг.З - узел планетарного и параллелограммного четы- рехзвенного механизмов, разрез.
Предлагаемое мотовило содержит составной трубчатый вал 1, на котором жестко закреплены выполненные в виде полых дисков водила 2, а внутри полых дисков в их подшипниках 3 свободно установлены са- теллитные звездочки 4 по числу граблин 5 мотовила.
Внутри вала 1 размеш,ена ось 6 с жестко установленными на ней центральными звездочками 7. Цепной контур внутри каждого водила 2 посредством оборотной 8 и натяжной 9 звездочек соединяет все сателлитные звездочки 4 цепного планетарного механизма с центральной звездочкой 7. Планетарный механизм выполнен с передаточным отноше- ним 2:1.
Для регулировки формы траектории абсолютного движения в стеблестое ось 6 фиксируется в разных положениях.
Четырехзвенные параллелограммные ме- механизмы для обеспечения движения граблин 5 по эллипсу, соединяющие граблины 5 со ступицами сателлитных звездочек 4, размещены на торцовых сторонах мотовила.
Этот механизм состоит из ведомого звена 10, смонтированного на конце ступицы сателлитной звездочки 4, кривошипа с валиком 11, поводка 12, граблииы 5 и кривошипа 13 граблины 5, соединенных между собой шарнирно. Длина ведомого звена 10
меньше расстояния между осями вращения центральной 7 и сателлитной 4 звездочек, длина поводка 12 граблины 5 равна длине ведомого звена 10, а межосевое расстояние кривошипа 13 граблины 5 равно эксцентриситету мотовила.
Для компенсации непараллельности осей при изготовлении шарниры четырехзвенника граблин 5 выполнены на сферических втулках 14, закрепленных штампованными скобками 15, при этом подшипник на кривошипе 13 граблины 5 - разъемный.
Для переноса кинематической цепи четырехзвенника через отверстие в ступицах сателлитных звездочек 4 служит кривошип 16 крестовины 17 с эксцентриковым механизмом 18.
Привод вала мотовила цепной (не показан) .
Предлагаемое мотовило работает следую- Ш.ИМ образом.
При вращении вала 1 мотовила и водила 2 цепной контур обкатывает вокруг цент- зальной звездочки 7 и поворачивает сателлитные звездочки 4 в обратном направлении относительно водила 2 с угловой скоростью вдвое большей, чем у водила 2.
Е нешний шарнир ведомого звена 10 описывает эллипс, щарнир поводка 12 грабли- ы 5 на валике кривошипа 11 вращается синхронно шарниру кривошипа 16 крестовины 17 и обеспечивает относительное движение граблины по эллипсу.
Тем самым, за счет изменения кинематики мотовила и изменения траектории относительного движения граблин 5 увеличивается зона активного воздействия граблины 5 в стеблестое, обеспечивается оптимальная высотная установка мотовила, допускаются повышенные рабочие скорости без увеличения абсолютной скорости граблины 5 в момент входа в стеблестой.
12
iO
Составитель Г. Борисова
Редактор Л. АвраменкоТехред И. ВересКорректор М. Самборская
-Заказ 1501/1Тираж 679Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж--35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4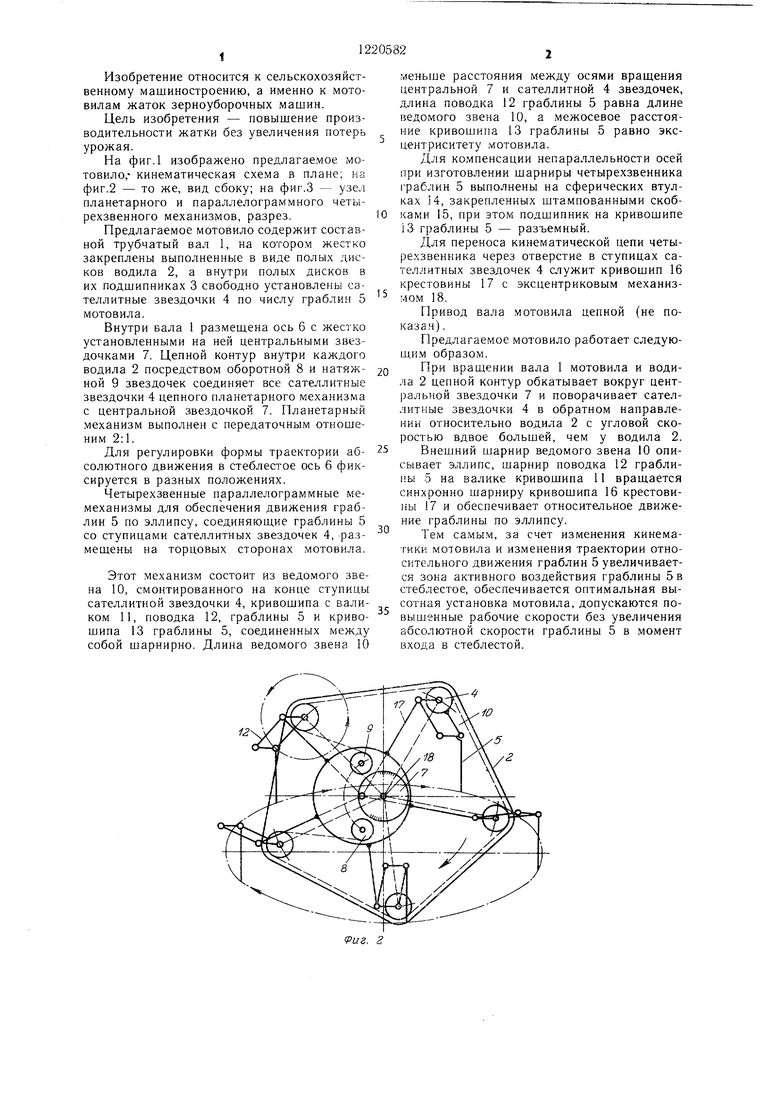
| название | год | авторы | номер документа |
|---|---|---|---|
| Мотовило | 1983 |
|
SU1117008A1 |
| Безэксцентриковое универсальное мотовило | 1983 |
|
SU1207424A1 |
| Безэксцентриковое универсальное мотовило | 1987 |
|
SU1477304A1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПОЛЕГЛОГО ГОРОХА | 2002 |
|
RU2234209C1 |
| Соломокопнитель зерноуборочного комбайна | 1985 |
|
SU1400536A1 |
| Мотовило | 1982 |
|
SU1063315A1 |
| Мотовило | 1988 |
|
SU1538910A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2088061C1 |
| Мотовило | 1980 |
|
SU990128A1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |

| Изаксон X | |||
| И | |||
| Зерноуборочные комбайны «Нива и «Колос.-М.: Колос, 1980, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
