Изобретение относится к средствам автоматизации производственных процессов и может быть использовано, в частности, в качестве силового привода линейного модуля манипулятора.
Цель изобретения - повышение точности позиционирования и уменьшение габаритов.
На чертеже представлена принципиальная схема привода.
Пневмопривод содержит корпус 1, пневмоцилиндр 2 с установленным в не поршнем 3 с двухсторонним штоком 4 с образованием двух рабочих полостей 5 и 6, основное демпфирующее устройство 7, подключенное к рабочей полости 5 и включающее регулируемый дроссель 8, обратный клапан, выполненный в виде манжеты 9 и ступенчатого зо- лотника 10, в осевой расточке 11 которого расположена штанга 12 с возможностью перемещения в золотнике 10 и взаимодействия с ним через выступ 13 и со штоком 4 пневмоцилинд- ра через регулируемый упор 14 и тягу 15, причем расточка 11 золотника 10 выполнена ступенчатой, выступ 13 жестко связан со штангой 12 и расположен в расточке 11 золотни- ка 10 большего диаметра, а рёгулиру- емглй упор 14 выполнен на тяге 15. Штанга 12 имеет возможность точечного контакта с тягой 15 при перемещении штока 4. Кроме того, пневмопривод снабжен дополнительным демпфиру ющим устройством 16, подключенным к второй рабочей полости 6 и включающим регулируемый дроссель 17, обратный клапан, выполненный в виде ман- жеты 18 и ступенчатого золотника 19, в осевой расточке 20 которого расположена штанга 21 с возможностью перемещения в золотнике 19 и взаимодействия с ним через выступ 22 и с корпу- сом 23 манипулятора, причем штанга 21 жестко связана со штангой 12 и выполнена с холостым ходом Н , большим рабочего перемещения Н каждого золотника 10 и 19. Демпфирующие устройства 7 и 16 подключены к рабочим полостям 5 и 6 каналами 24 и 25 и к пневмораспределительной аппаратуре (не показана) каналами 26 и 27.
Пневмопривод работает следующим образом.
0
5 Q 5 Q ,
5
0
5
В исходном положении поршень 3 пневмоцилиндра 2 находится в. крайнем левом (по чертежу) положении.
При подаче рабочей среды в канал 26 манжета 9 деформируется и рабочая среда поступает через канал 24 в рабочую полость 5. При этом золотник 10 перемещается вправо (по чертежу) на величину Н. Под действием перепада давления в рабочих полостях 5 и 6 поршень 5 также перемещается вправо. Рабочая среда из рабочей полости 6 вытесняется через канал 25 и зазор между манжетой 18 и золотником 19 в канал 27 и далее в атмосферу. При перемещении золотника 10 вправо больший его диаметр выходит из манжеты 9, после чего рабочая среда поступает в полость 5 беспрепятственно. К концу рабочего перемещения корпуса 23 манипулятора тяга 15 взаимодействует со штангой 12, и так как к этому моменту -холостой ход Н штанги 21 выбран до нуля, то штанга 21 выступом 22 перемещает золотник 19 в том же направлении, который своим большим диамет- ,ром входит в манжету 18. Далее рабочая среда из полости 6 поступает в атмосферу через регулируемый дроссель 17 и каналы 25 и 27. Скорость истечения рабочей среды при этом становится зависимой от настройки дросселя 17. Таким образом осуществляется демпфирование до конца перемещения, которое ограничивается касанием регулируемого упора 14 корпусом. 1. Далее рабочая среда подается в канал 27, а канал 26 сообщается с атмосферой, при этом торможение осуществляется демпфирующим устройством 7, которое рабочает аналогично устройству 16. Условие постоянства. точек контакта подвижных элементов конструкции практически выполняется, что гарантирует максимально высокую точность позиционирова1ния, так как регулируемый упор 14 может устанавливаться на штоке 4 в любой точке диапазона рабочих перемещений, следовательно, и торможение можно осуществлять в любой точке.
Кроме того, конструкция пневмопривода высококомпактна, что позволяет применять привод в короткоходовых линейных модулях манипулятора с малыми габаритами и массой.
75 12 1Э 7 в 9 26 1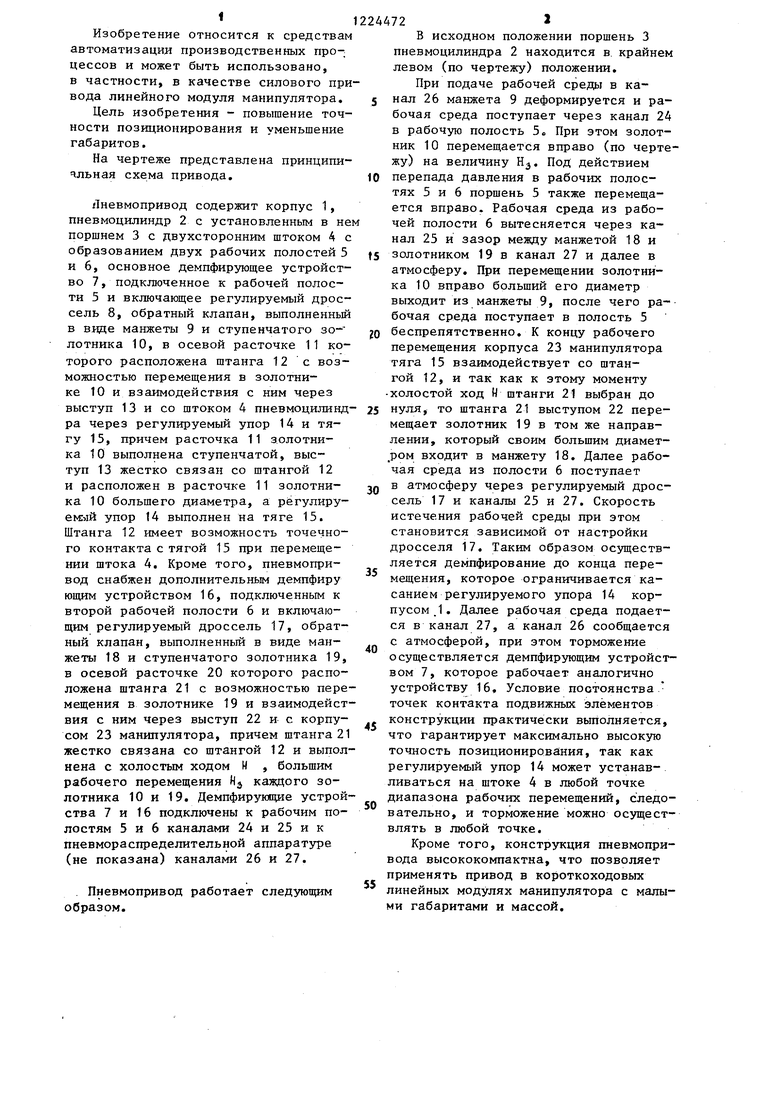
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОЦИЛИНДР | 1991 |
|
RU2006684C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU926382A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ С ОДНОСТОРОННИМ УПРАВЛЕНИЕМ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242575C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2266439C2 |
| ГИДРАВЛИЧЕСКИЙ ЗОНДОВЫЙ ПЕРФОРАТОР | 2013 |
|
RU2550709C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ МОДУЛЬ ДЛЯ ПРИВОДА ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2249662C1 |
| Пневматический привод | 1980 |
|
SU901673A1 |
| ПЯТИЛИНЕЙНЫЙ, ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2208187C2 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU926381A1 |

Редактор М.Петрова
Составитель В,Коваль Техред И.Попович
Заказ 1906/32Тираж 610Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий . 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор И.Муска
| Пневмопривод | 1982 |
|
SU1078150A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
