I
Изобретений относится к устройст-. вам автоматики и может быть использовано в механизмах, требующих дискратного позиционирования.
Известен пневмогидравлический цифровой привод, содержащий пневмоцилиндр с последовательно расположенными поршнями с образованием рабочих полостей и штокомi связанным с демпфирующим устройством, включающим гидроцилиндр с размещенным в нем поршнем с образованием управляющих полостей, сообщенных между собой через золотник с торцевой камерой, и управляющее устройство, выполненное в виде питающей и считывающей плит с каналами по числу рабочих полостей,, между, которыми расположена перфокарта с отверстиями, взаимодействующая с зубчатой рейкой с приводом и фиксатором, и усилители Dj.
Недостатком известногб привода является то, что конструкция демпфирующего устройства исключает возможность изменения закона перемещения золотника и вероятность заклинивания последнего в виду жесткой кине матической связи его с фиксатором.
Цель изобретения - повышение надежности и плавности работы.
Поставленная цель достигается тем, что привод снабжен дросселем с обратным клапаном, а питающая и считывающая плиты - дополнительными
10 клапанами, причем дополнительный канал считывающей плиты связан через усилитель и дроссель с обратным клапаном с торцевой камерой золотника.
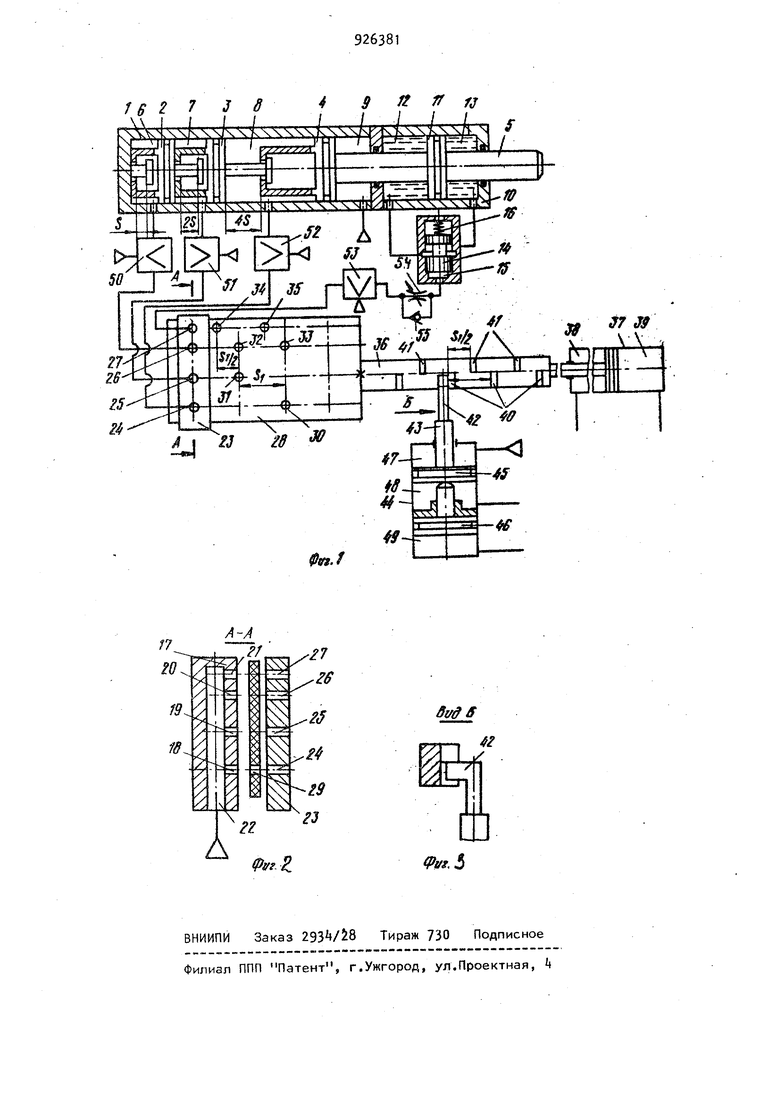
На фиг. 1 представлена схема
ts пневмогидравлического цифрового привода; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 вид Б на фиг.1.
Пневмогидравлический цифровой привод содержит пневмоцилиндр 1 с
20 последовательно расположенными поршнями 2, 3 и и штоком 5 с образованием рабочих полостей 6, 7 и 8 и возвратной полости 9. Шток 5 связан с демпфирующим устройством, включающим гидроцилиндр 10 с размещенным в нем поршнем 11 с образованием управляющих полостей 12 и 13, сообщенных между, .собой через золотник И с торцевой камерой 15 и пружиной 16. Кроме того, привод содержит управляющее устройство, выполне ное в виде питающей плиты 17 с основными каналами 18, 19 и 20 и дополнительным каналом 21, связанны ми с питающим каналом 22, и смитыва |Дую плиту 23 с бсновными каналами 2, 25 и 26 и дополнительным каналом 27 и с перемещающейся между питающей и считывающей плитами, соответственно, 17 и 23 перфокартой 28 с отверстиями 29-35. Перфокарта 28 соединена с зубчатой рейкой Зб,взаи модействующей с приводом 37, включа ющим полости 38 и 39. Рейка ЗЬ имее нижний (по чертежу) ряд зубьев 0 и верхний ряд зубьев h, с которыми входит в зацепление фиксаторЛ2, со диненный со штокбм 3 трехпозиционного поперечного привода 4,-состоящего из поршней 5 и {б и полостей 47, 8 и 49. Основные каналы 24, 25 и 2б счит вающей плиты сообщены через усилите ли 50, 51 и 52 с рабочими полостями 6, 7 и 8 пневмоцилиндра 1, а дополнительный канал 27 через усилитель 53 дроссель 54 с обратным клапаном 55 - с торцевой камерой 15 золотника 14. Привод работает следующим образом. В исходном положении рабочая сре да поступает в возвратную полость 9 и полость 39 привода 37, а также в полости 47 и 49 привода 44. В канал 22 подается струйное давление питания. При этом фиксатор 42 находится в среднем положении и в него упирается один из зубьев 40 рейки Зб. В этом положении сигнал в виде струйного давления с канала 18 через отверстие 29 в перфокарте 28 поступае канал 24 и далее на управляющий вход усилителя 52. Усилитель 52 под ет давление питания в рабочую полост 8 пневмоцилиндра 1, и поршень 4 находится во взаимодействии с упором поршня 3. Золотник 14 соединяет межд собой управляющие полости 12 и 13 гидроцилиндра 10. При подаче управляющего сигнала в полость 48 фикса14тор 42 перемещается вверх (по чертежу), выходит из зацепления с зубом 40 и входит в пространство между зубьями 41 рейки 36. Под действием со стороны полости 39 привода 37 рейка 36 перемещается на полшага до упора зуба 41 в фиксатор 42, а, следовательно, и перфокарта 28 переместится на ту же величину. При этом от&ерстие 34 соединяет между собой канал 21 с каналом 27 (фиг. 3) и струйное давление питания поступает на усилитель 53 и далее через обратный клапан 55 в торцевую камеру 15 золотника 14, и последний перемещается вверх (по чертежу),запирая при этом полости 12 и 13 гидроцилиндра 10. Одновременно с этим отключается, уси литель 52, и давление рабочей среды в рабочей полости 8 уменьшается, однако шток 5 остается неподвижным, так как заперты управляющие полости 12 и 13. При снятии управляющего сигнала с полости 48 фиксатор 42 под действием давления со стороны полости 47 перемещается вниз (по чертежу), входя в пространство между зубьями 40 рейки 36/ и Последняя вместе с перфокартой 28 одвигается на следующие полшага до упора зуба 10 в фиксатор 34. В этом положении перфокарта 28 разъединяет каналы 21 и 27 и соединяет между собой соответствующие, каналы 19 с 25 и 20 с 26 питающей плиты 17 и считывающей плиты 23 (фиг. 3). Усилители 50 и 51 включаются и подают питание в-рабочие полости 6 и 7 пневмоцилиндра 1. При этом поршень 2 перемещается на величину S,.а.поршень 3 - на-величину 3S. С включением усилителей 50 и 51 отключается усилитель 53, торцевая камера 15 золотника 14 через регулируемый дроссель 54 сообщается с атмосферой. Золотник 14 под действием пружины 16 перемещается вниз (по чертежу) и соединяет между собой управляющие полости 12 и 13 гидроцилиндра 10. Под действием давления со стороны возвратной полости 9 поршень 4 и вместе с ним шток 5 перемещаются влево на величину S до упора в поршень 3. Для повышения плавности перемещения выходного штока 5 во время переключения разрядов пневмоцилиндра 1 необходимо, чтобы время падения давления в рабочих полостях 6, 7 и 8 до начала движения поршней 2, 3 и 4 было больш$ времени, необходимого на перемещение золотника 14 вверх, а время опорожнения торцевой камеры 15 было больше времени, необходимого для перемещения поршней 2 и 3 от упора до упора. Время опорожнения торцевой камеры 15 настраивается дроссёлем 5«,а наполнения - изменением жесткости пружины 16. В тех случаях рабочая среда поступает только в рабочие полости 6, 7 и 8, управляющий сигнал на усилитель 53 не подается, т.е. в перфокарте 28 ряд, соответствующий отверс тиям 3 и 35 отсутствует. Реверс устройства для установки в исходное положение осуществляется при подаче питания в полость 38 привода 37 и снятии с полости привода , Формула изобретения Пневмогидравлический цифровой при вод, содержащий пневмоцилиндр с последовательно расположенными поршня25ми с образованием рабочих полостей и штоком, связанным с демпфирующим устройством, включающим гидроцилиндр с размещенным в нем поршнем с образованием управляющих полостей, сообщен ных между собой через золотник с торцевой камерой, управляющее устройство, выполненное в виде питающей и считывающей плит с каналами по чис;лу рабочих полостей, между которыми расположена перфокарта с отверстиями, взаимодействущаяТ; с зубчатой рейкой с приводом и фиксатором, и усилители, отличающийся тем, что, с целью повышения надежности и плавности работы, привод снабжен дросселем с обратным клапаном, а питающая и считывающая плиты - дополнительными клапанами, причем дополнительный канал считывающей плиты связан через усилитель и дроссель с обратным клапаном с торцевой камерой золотника. Источники информации, принятые во внимание при экспе ртизе 1. Авторское свидетельство СССР по заявке № 2882313/25-06, кл. F 15 В 11/12, 1980.
4 S ff ff fj
// 7 J 

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой привод | 1980 |
|
SU1038631A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU926382A1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| Пневмогидропривод | 1981 |
|
SU1028907A1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С НЕРЕВЕРСИВНЫМ НАСОСОМ | 2011 |
|
RU2484314C2 |
| Пневмогидравлический цифровой привод | 1986 |
|
SU1418513A1 |
| СТРУЙНЫЙ КОМАНДОАППАРАТ | 1972 |
|
SU346709A1 |
| Устройство для дробления стружки | 1977 |
|
SU722689A2 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1562542A1 |
У9
