(54) ПНЕВМОГИДРАВЛИЧЕСКИЙ ЦИФРОВОЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмогидравлический цифровой привод | 1986 |
|
SU1418513A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Гидравлический цифровой привод | 1986 |
|
SU1372112A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU926381A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Гидравлический цифровой привод | 1986 |
|
SU1339314A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Амортизирующее устройство | 1983 |
|
SU1106589A1 |
| Самотормозящее зажимное устройство | 1986 |
|
SU1392251A1 |
| Регулятор давления | 1976 |
|
SU742891A1 |
I
Изобретение относится к устройствам автоматики и может быть использовано в механизмах дискретного перемещения .
Известен пневмогидравлимеский цифровой привод, содержащий пневмоцилиндр с последовательно расположенными в нем поршнями и штоком и демпфирующее устройство, включающее гидроцилиндр, размещенные в нем с образованием управляющи Гполостей поршень и шток, который жестко связан со штоком пневмоцилиндра, и управляющее устройство l .
Недостатком известного устройства является сложность конструкции демпфирующего устройства, обусловленная наличием большого числа датчиков положения и логического блока.
Цель изобретения - расширение области применения устройства.
Поставленная цель достигается тем, что демпфирующее устройство снабжено дросселями с обратным клапаном, гидроцилиндр - внутренними кольцевыми расточками и расположенными вдоль образующей окнами, а управляющее устройство выполнено в виде дешифратора с входными и выходным каналами , причем кольцевые расточки сообщены через окна с входными каналами дешифратора, выходной канал которого связан через дроссели с обратным клапаном с управляющими полостями гидроцилиндра.
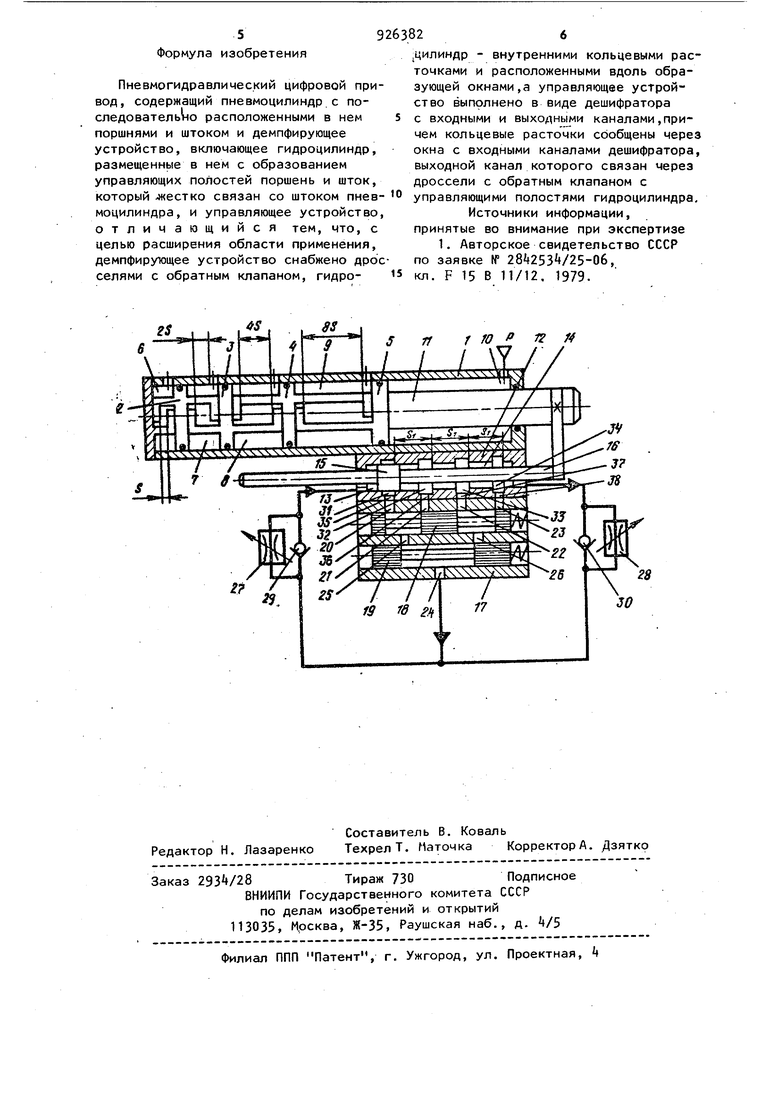
На чертеже представлена полуконструктивная схема привода.
Пневмогидравлический цифровой привод содержит пневмоцилиндр 1 с последовательно расположенными в нем поршнями 2-5, с ходами, соответственно равными S, 2S, 4S и 8S, с обра зованием рабочих полостей 6-9 и возвратной полости 10. С поршнем 5 связан шток П. Демпфирующее устройство включает гидроцилиндр 12 с размещенным в нем с образованием управляющих полостей 13 и 1 поршнем 15 со штоком 16, который жестко связан со штоком 11, и управляющее устройство, выполненное 9 виде дешифратора 17 с золотниками 18 и 19, входными каналами 20, 21, 22 и 23, выходным каналом 2Ц и внутренние каналы 25 и 26. Выходной канал 2А связан через дроссели 27 и 28 с обратными клапанами, соответственно, 29 и 30 с управ ляющими полостями 13 и гидроцилиндра 12. Кроме того, на гидроцилиидре 12 выполнены внутренние кольцевые расточки 31-3 с шагом S, 55, вдоль образующей расположены окна 35-38, сообщающие кольцевые расточки ЗТЗ с входными каналами 20-23 дешифратора 17. Устройство работает следующим образом. В исходном положении давление пи тания Р подведено в возвратную полость 10 пневмоцилиндра 1. Под действием этого давления все поршни 2занимают крайнее левое (по чертежу) положение. Поршень 15 гидроцилиндра 12 также занимает левое положение, при этом он перекрывает кольцевую расточку 33. Золотники 18 и 19 дешифратора 17 в положении, при котором кольцевая расточка 33 через каналы 20 и 25 со динена с выходным каналом 2. При подаче пневматического дав , ления питания в рабочую полость 6 п шень 2 перемещается вправо на велич ну S, следовательно шток 11 тоже переместится на величину S. При это жидкость из управляющей полости 1 вытесняется в управляющую полость 13 через дроссель 28 и обратный кла пан 29. Скорость перемещения штока 11 в этом случае определяется гидра лическим сопротивлением дросселя 28 При отключении давления питания от рабочей полости 6 шток 11 под де ствием давления в возвратной полости 10 возвращается в исходное положение. При этом до тех пор, пока поршень 15 не перекроет кольцевую расточку 33, жидкость вытесняется из управляющей полости 13 гидроцилиндра 12 в управляющую полость 14 чер дроссель 27 и дешифратор 17 по кана 3, 25 и 2k, что обеспечивает быст рое перемещение штока 11. При перекрытии поршнем 15 кольцевой расточк 33 жидкость вытесняется только череэ дроссель 27, сопротивлением которого определяется скорость торможения . При подаче давления,питания,например,в рабочие полости 8 и 9 поршень перемещается на величину 4S,поршень 5 на величину 8S, и, следовательно, величина перемещения штока 11 составляет сумму отдельных перемещений поршней k и 5, т.е. 12. Одновременно с подачей питающего давления в полости 8 и 9 давление питания подается под левый (по чертежу) торец золотника 19 дешифратора. При этом с выходным каналом 2 соединяется кольцевая расточка З. При перемещении поршня 15 вправо до перекрытия расточки 3 жидкость вытесняется из управляющей полости 1 в полость 13 одновременно через дроссель 28 и через каналы 22, 26, 2 дешифратора 17, что обеспечивает быстрое перемещение штока 11. При перекрытии поршнем 15 расточки 31 жидкость вытесняется только через дроссель 28, сопротивлением которого определяется скорость торможения . При отключении давления питания, например, от рабочей полости 9 подается команда и на дешифратор 17,при этом давление отключается от золотника 19 и подается под торец золотника 18. При этом с выходным каналом 2 соединяется кольцевая расточка 3. Под действием давления питания возвратной полости 10 перемещается влево штокП и, следовательно., поршень 15 гидроцилиндра 12. При перекрытии поршнем 15 кольцевой расточки 3 скорость уменьшается, жидкость из управляющей полости 13 вытесняется в полость Tt через дроссель 27 и обратный клапан 30. Таким образом, при обработке любой комбинации управляющих сигналов, привод обеспечивает быстрый подвод и надежное демпфирование выходного штока 11 в конце перемещения. При этом число разрядов дешифратора 17 может быть меньшим числа разрядов пневмоцилиндра 1, что упрощает конструкцию, повышает надежность демпфирования и позволит широко применять привод в роботах-манипуляторах, стоанках и других механизмах, требующих дискретного перемещения рабочего органа по определенным законам регулирования. Формула изобретения Пневмогидравлический цифровой пр вод, содержащий пневмоцилиндр с последователь 1о расположенными в нем поршнями и штоком и демпфирующее устройство, включающее гидроцилиндр размещенные в нем с образованием управляющих полостей поршень и штпк ™™::;.-;: ipH-J селями с обратным клапаном, гидро -
ч в гн 826 ;Цилиндр - внутренними кольцевыми расточками и расположенными вдоль образующей окнами,а управляющее устройство выполнено в виде дешифратора с входными и выходнь1ми каналами,причем кольцевые расточки сообщены через окна с входными каналами дешифратора, выходной канал которого связан через пгл «г дроссели с обратным клапаном с г --. кл. F 15 В 11/12 1979.
