Известные автоматические регуляторы не позволяют производить спуск колонны труб на заранее заданном наиболее рациональном режиме.
Описываемый регулятор устраняет этот недостаток путем автоматического регулирования сопротивления механического тормоза.
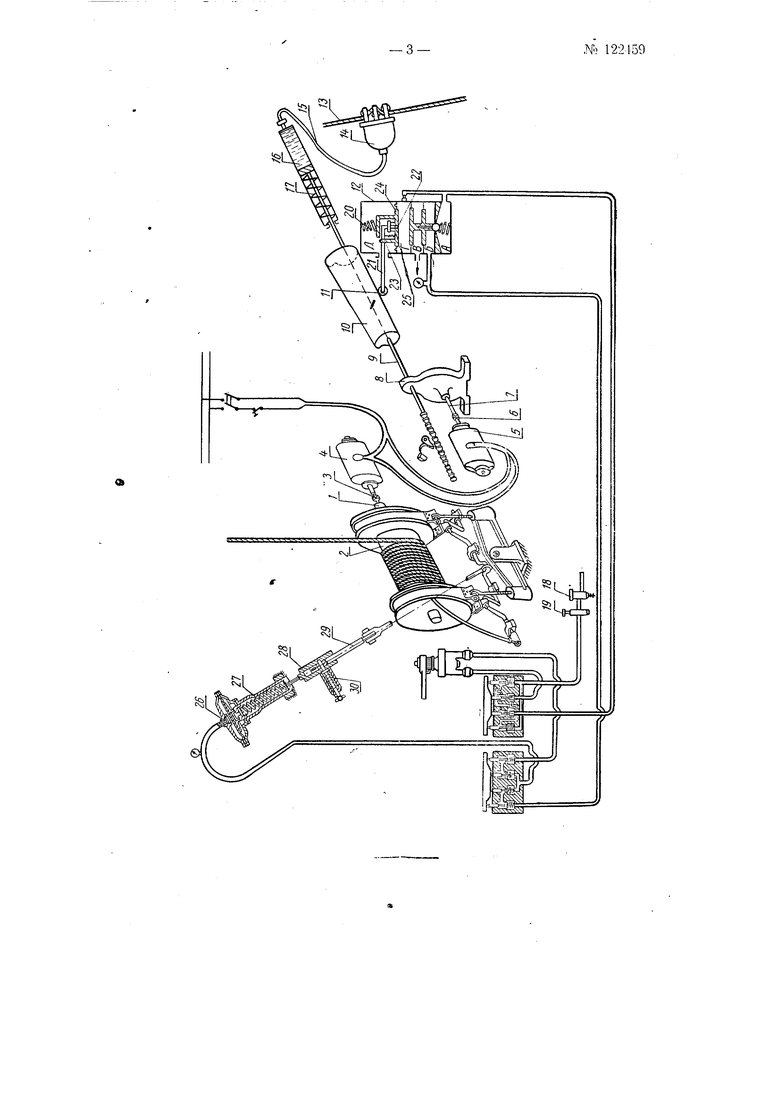
На чертеже изображена схема регулятора.
Автоматический регулятор механического тормоза лебедок составляют следующие узлы: программный, воздухопитатель, крановый, задатчик, исполнительный механизм.
Назначением программного узла является задание узлу задатчика программы изменения давления сжатого воздуха соответственно заданному закону регулирования в зависимости от веса спускаемого инструмента и от положения занимаемого крюком (высоты его от ротора).
С подъемным валом У лебедки 2 посредством муфты 3 соединяется сельсин-датчик 4, а сельсин-приемник 5 посредством муфты 6 соединяется с ведущей осью 7 редуктора 8. Ведомая ось 9 редуктора соединена с кулачком. Таким образом, каждому положению крюка соответствует определенное -положение кулачка 10 по отнощению к ролику 11 -узла задатчика 12. Редуктор, передающий движение от подъемного вала лебедки через сельсин-датчик и сельсин-приемник к кулачку, рассчитывают таким образом, чтобы при спуске крюка из крайнего верхнего положения до положения, когда элеватор садится на ротор, кулачок сделал не больше одного оборота. Таким образом производят программное регулирование скорости спуска инструмента по длине спускаемой свечи. Для регулирования величины скорости спуска свечи в зависимости от веса инструмента на мертвый конец талевого каната 13 устанавливают мессдозу 14, соединенную гибкой трубкой 15 с цилиндром 16, порщень которого при помощи щток-вала связывается с кулачком. Лвижение кулачка справа налево обусловлено действием жидкости в ци№ 122459 2 -
линдре 16, а обратное его движение происходит под действием пружины 17. В зависимости от изменения веса инструмента изменяется натяжение талевого каната и соответственно этому изменяется давление жидкости в цилиндре. Изменения давления, в свою очередь, вызывают изменение положения поршня и соответственно этому изменение положения кулачка по отношению к ролику.
Питание системы сжатым воздухом под давлением примерно 1,2 кг1см осуществляется от обш,его коллектора через индивидуальный фильтр 18 и редуктор 19, если в буровой имеется воздухопровод. При отсутствии воздухопровода, необходимо наличие специальной компрессорной установки.
Крановый узел состоит из двух четырехклапанных «ранов и кранамашиниста системы Казанцева. Назначением этого узла является переключение тормозной системы на работу «автоматическое или же «ручное-пневматическое. При работе «ручное-пневматическое крана-машиниста служит для регулирования степени торможения механического тормоза.
При помощи задатчика осуществляется регулирование величины тормозного момента путем отработки на выходе задатчика давления сжатого воздуха, подаваемого исполнительному механизму. Узел задатчика состоит из трех секций, разделенных мембранами: усилительного реле шарикового типа, состоящего из камер А, Б и В, камеры Г сопла и верхней камеры Д, в которой размещены пружина 20, рычаг 27 и сопло 22. Точка 23 опоры рычага закреплена вместе с соплом на мембране 24. Правый конец „рычага является заслонкой, сопла и притягивается к нему пружиной 25. На левом конце рычага имеется ролик, на который действует кулачок, перемещающий конец рычага.
Функцией исполнительного механизма является управление механическим тормозом лебедки. Сжатый воздух подводится через щтуцер 26 в мембранную камеру и оказывает давление на мембрану. Мембрана зажимается между верхней и нижней крышками и опирается на металлический диск, который, в свою очередь, упирается в направляющий стакан. К центру стакана прикрепляется шток исполнительного механизма. Верхний, конец пружины также упирается в дно стакана, а нижний конец пружины в дно корпуса 27. В цилиндрический конец штока 28 входит шток 29, соединенный тягой с шарниром. На цилиндрическом конце щтока укреплен фиксатор 30, состоящий из корпуса пальца, пружины и штифта. Фиксатором пользуются в тех случаях, когда по какимлибо причинам необходимо управление механического тормоза отключить от пневмоуправления.
Предмет изобретения
Автоматический регулятор ленточных тормозов лебедок, отличающийся тем, что, с целью осуществления рационального режима спуска колонны труб, он вылолнен с пневматическим регулятором, состоящим из узлов программного датчика, воздухопитателя, исполнительного механизма и кранов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для установления рациональной скорости спуска бурового инструмента | 1958 |
|
SU118475A1 |
| Прибор для контроля режима спуска бурового инструмента | 1958 |
|
SU116663A1 |
| Стабилизатор осевой нагрузки на долото | 1978 |
|
SU859600A1 |
| Система для автоматического регулирования подачи бурового инструмента | 1977 |
|
SU726295A1 |
| БУРОВАЯ УСТАНОВКА | 1999 |
|
RU2170324C1 |
| Устройство для спуска и подъема бурильной колонны | 1973 |
|
SU574517A1 |
| Устройство подачи долота | 1979 |
|
SU941537A1 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Регулятор подачи долота | 1982 |
|
SU1127970A1 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |