Щ а
Изобретение относится к буровой технике, а именно к устройствам для осуществления управления скоростью машинных операций по спуску и подъему инструмента при электрическом приводе спуско-подъемного аоге- гата (СПА), и может применяться на установках для эксплуатационного и глубокого разведочного бурения неф- тяных и газовых скважин.
Целью изобретения является повышение точности управления скоростью перемещения колонны бурильных труб за счет регулирования частоты вра- щения электропривода при поддержании постоянного уровня среднеквадра- тических потерь в якоре, т.е. обеспечения управления, гарантирующего наивысшую производительность машин- ных операций при заданных ограничениях ( установленная мощность электропривода, максимально допустимая линейная скорость перемещения).
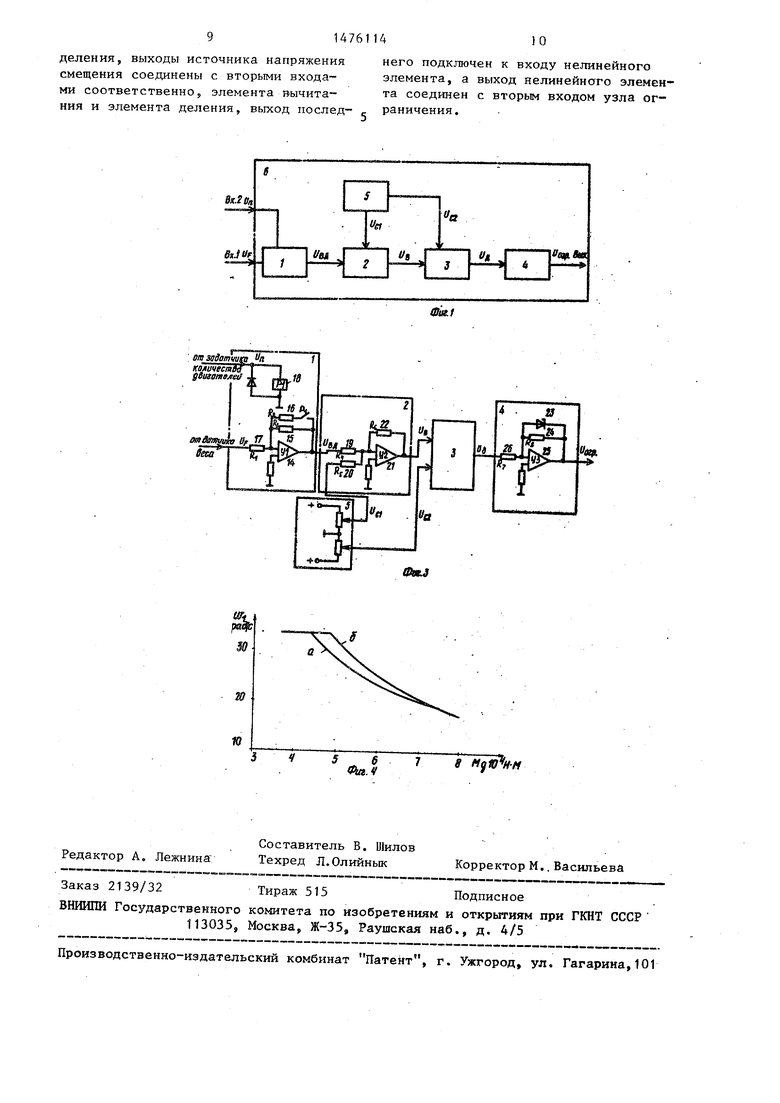
На фиг. 1 приведена взаимосвязь элементов, обеспечивающих формирование- оптимальной скорости электропривода спуско-подъемного агрегата для осуществления оптимального управления скоростью спуска и подъема колон ны бурильных труб (КВТ); на фиг. 2 - структурная схема системы; на фиг.З принципиальная схема системы; на фиг. 4 - расчетные механические характеристики электропривода буровой установки БУ-15000. .
Длительность рабочего цикла спу- ско-подъемных операций (СПО) - величина переменная в связи с тем, что изменяется продолжительность машинны операций. Длительность вспомогательных операций при достаточной квалификации обслуживающего персонала и существующем уровне механизации - величина практически постоянная, не зависящая от веса КВТ. Следовательно, в целом для электропривода СПА продолжительность включения - величина переменная, уменьшающаяся по мере снижения веса КВТ и повышения скорости подъема. В данном случа рациональным законом регулирования является управление, оптимальное по нагреву, при котором реализуется дифференцированный выбор коэффициента статической перегрузки с целью поддержания постоянного уровня среднеквадратичных потерь в якоре электродвигателя.
Уравнение оптимальной механической характеристики для регулирования по условию поддержания постоянного уровня среднеквадратических потерь в якоре, т.е. по условию постоянства циклового тока, имеет следующий
вид:
ы i. 1
(О
Л ° w; /Ч
(2)
где М; и ш; - текущие значения момента на валу электродвигателя и угловой скорости вращения; М. и ш - значения вышеуказанных
V О
параметров в основной расчетной точке; и - относительное приращение момента по сравнению с. характеристикой постоянства мощности при максимально допустимой (для СПА) частоте вращения электродвигателя.
В системах электропривода буровых лебедок „„„, 2и., следовательном Сщ КС
.о 2
Маис
Блок формирования оптимальной скорости электропривода СПА обеспечивает управление частотой вращения электродвигателя в режиме установившегося движения по закону постоянства циклового тока (1).
Поскольку для конкретной буровой установки, значения М0 Л, Vwew постояны, соотношение (1) преобразуется к виду:
А
W -
(3)
ц. - заданное значение угловой скорости вращения электродвигателя в установившемся режиме движения электропривода, рад/с; М, - статический момент на валу
электродвигателя,
А М„(1 - а ) ю о cons t;
В ДМ,
const;
Мр - статический момент на валу электродвигателя в основной расчетной точке.
Соотношение (3) позволяет оперативно оценить необходимые с точки - зрения рационального управления значения частоты вращения электродвигателя в процессе перемещения КВТ
для каждого цикла в функции момента нагрузки Mi, который зависит от текущего значения нагрузки на крюке.
Рациональное значение частоты вращения электродвигателя определяется на основании сигнала датчика веса КБТ и после проведения ряда преобразований согласно соотношению (3) блок формирует необходимое за- дающее воздействие на систему регулирования электроприводом СПА в виде аналогового сигнала управления.
Аналоговый сигнал, поступающий от задатчика веса, преобразуется в значение, соответствующее статическому моменту на валу электродвигателя.
Преобразования основаны на использовании соотношения
1. (4)
м,.
1Те 1« П
где F Чр - усилие на крюке, Н;
гпр - радиус приведения, м; tjTU, lflg КПД талевой системы и вала
буровой лебедки;
п - количество работающих электродвигателей.
Если принять КПД и радиус приведения постоянными для конкретной бу- ровой установки, то справедливым является соотношение 1
М ; A F
kp п
где
Д
Г tip
„ ч те чпв
Выбор масштабных коэффициентов вида
г мо ксШ с
mS -WM. . П1
Г п
с FMOIK.C мЛ
40
де FWaKc 10 В - максимальное значение сигнала с датчика веса, пропорциональное мак- 45 симальному (F ) усилию на крюке; - масштабный коэффициент статического
m
м
момента на валу элетродвигателя, В/Н м; m p - масштабный коэффициент усилия на крюке, В/Н.
позволяет определить значение статического момента на валу электродвигателя в виде
М,- JJF,.
(5)
где Ft - текущее значение сигнала
датчика веса, Б; М, m ..М.- значение статического моменАЧ I
та с учетом масштабного коэффициента, В. Из соотношения (5) следует, что величина статического момента на валу электродвигателя однозначно связана с сигналами датчика веса КБТ, однако при этом необходимо учитывать заданное количество работающих электродвигателей.
С учетом масштабных коэффициентов тм и mw Расчетное соотношение (3) преобразуется к виду а
ш,
1 ,. -„
где ы,
m ш - расчетное значение рациональной угловой скорости вала электродвигателя,
в;
-а mMmwvA const, В; -b m MB const, В.
Масштабный коэффициент по угловой скорости
U)
mu.
Ь° АЛ Й КС
где ui. r - максимальная угловая скоМ W К.
рость вала электродвигателя, рад/с; UJMC(KC- максимальная величина
аналогового сигнала, В. Поскольку т равен коэффициенту обратной связи по угловой скорости Кос, а задающее воздействие V3c на систему регулирования связано с угловой скоростью вала электродвигателя соотношением
3 с К о с ы то справедливо равенство
N s c K
ы.
1 3 с ос
Формирование оптимальной скорости электропривода по критерию постоянства средневадратических потерь в якоре осуществляется путем последовательного соединения узла 1 выбора масштаба, элемента 2 вычитания, элемента 3 деления и нелинейного элемента 4. Выходы источника 5 напряжения смещения подключены к входам элементов вычитания 2 и деления 3.
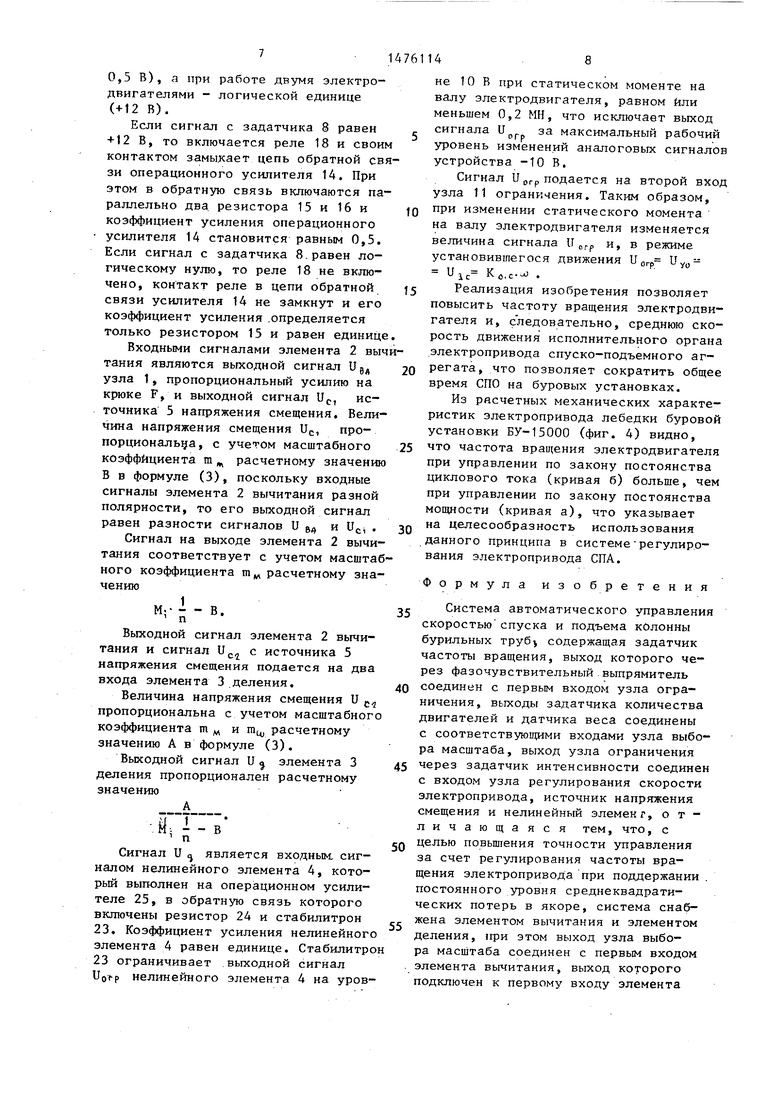
Входы узла 1 выбора масштаба (фиг.2) блока 6 формирования оптимальной скорости электропривода СНА по критерию постоянства срецнеквадратических потерь в якоре связаны с выходами датчика 7 веса и задатчика 8 количества двигателей. Задатчик 9 частоты вращения, фазочувствительный выпрямитель 10S узел 11 ограничения, задат- чик 12 интенсивности и узел 13 регулирования электропривода соединены последовательно, причем выход нелинейного элемента 4 подключен к второму входу узла 11 ограничения.
Узел 1 выбора масштаба (фиг. 3) содержит операционный усилитель 14 с резисторами 15S 16 и 17 и реле 18 выбора количества двигателей. На вход усилителя 14 подается сигнал, UIF с датчика 7 веса На второй вход узла 1 подается дискретный логически сигнал с задатчика 8 количества двигателей В обратную связь операционного усилителя 14 включены параллельно два резистора 15 и 16 и контакт Р 1 реле 18 выбора количества дви- гателей„
Элемент 2 вычитания содержит резисторы 19 и 20 на входе операционного усилителя 21 и резистор 22 в цепи обратной связи. Входными сигналами элемента 2 вычитания являются аналоговый сигнал U йд с выхода узла выбора масштаба и сигнал Uc,c первог выхода источника 5 напряжения смещения, причем сигналы UfeA и U С1 имею различную полярность.
Входными сигналами элемента 3 деления являются сигнал с выхода элемента 2 вычитания U 6 и сигнал с второго выхода источника 5 напряжения смещения иса„
Выходной сигнал элемента 3 деления UЈ подключен к входу нелинейного элемента 4, содержащего стабилитрон 23 и резистор 24 в цепи обратной связи операционного усилителя 25, а на его входе резистор 26..
Сигнал U огрс выхода нелинейного элемента 4 подается на вход узла 11 ограничения.
Операция по подъему колонны бурильных труб осуществляется по сигналу от задатчика 9 частоты вращения (сельсинный командоаппарат), расположенного на пульте бурильщика. При работе бурильщик устанавливает ручку сельсина в положение, соответствующее максимальному задающему сигналу частоты вращения электродвигателя. R результате с выхода задат- чика 9 частоты вращения на вход фазо- чувствительного выпрямителя 10 подается максимальное значение сигнала Ut)cn . Величина выходного сигнала фазочувствительного выпрямителя 10
также устанавливается на максимальном уровне 10 В.
Поскольку выход фазочувствительного выпрямителя 10 связан с первым входом узла 11 ограничения, то и на
5 этом входе устанавливается сигнал максимальной величины. Выходной же сигнал U vo узла 11 ограничения после окончания разгона электропривода, ограничивается на уровне, равном
о сигналу UOTp, который определяет необходимую с точки зрения рационального управления, частоту вращения электродвигателя в функции момента нагрузки М..
5 В процессе разгона электропривода допустимая величина ускорения задается задатчиком 12 интенсивности. Таким образом, частота вращения электродвигателя в режиме установив0 шегося движения является функцией момента нагрузки, так как выходной сигнал узла ограничения равен UOTp. В свою очередь, Uve равен сигналу UJc, а сигнал Uic является сиг, налом задания частоты вращения электродвигателя и подается непосредственно на узел 13 регулирования электропривода.
Зависимость величины сигнала U0rp
о от статического момента на валу электродвигателя в блоке 6 формирования оптимальной скорости электропривода СПА воспроизводится следующим образом.
Узел 1 выбора масштаба осуществляет корректировку сигнала датчика 7 веса в зависимости от заданного количества работающих электродвигателей. На его первый вход с датчика 7
0 веса подается аналоговый сигнал, пропорциональный усилию на крюке. Диапазон изменения аналогового сигнала 0-10 В.оНа второй вход узла 1 выбора масштаба подается дискретный логический сигнал с задатчика 8 количества двигателей.
При работе одним электродвигателем уровень сигнала с задатчика 8 соответствует логическому нулю (05
5
0,5 В), а при работе двумя электродвигателями - логической единице (+12 В).
Если сигнал с задатчика 8 равен +12 В, то включается реле 18 и своим контактом замыкает цепь обратной связи операционного усилителя 14. При этом в обратную связь включаются параллельно два резистора 15 и 16 и коэффициент усиления операционного усилителя 14 становится равным 0,5. Если сигнал с задатчика 8 равен логическому нулю, то реле 18 не включено, контакт реле в цепи обратной связи усилителя 14 не замкнут и его коэффициент усиления определяется только резистором 15 и равен единице
Входными сигналами элемента 2 вычтания являются выходной сигнал UflA узла 1, пропорциональный усилию на крюке F, и выходной сигнал UC1 источника 5 напряжения смещения. Величина напряжения смещения Uc, пропорциональна , с учетом масштабного коэффициента m m расчетному значению В в формуле (3), поскольку входные сигналы элемента 2 вычитания разной полярности, то его выходной сигнал равен разности сигналов U в„ и Uc, .
Сигнал на выходе элемента 2 вычитания соответствует с учетом масштабного коэффициента mw расчетному значению
М;- - - В.
1 п
Выходной сигнал элемента 2 вычитания и сигнал UC1 с источника 5 напряжения смещения подается на два входа элемента 3 деления.
Величина напряжения смещения U CrJ пропорциональна с учетом масштабного коэффициента m M и т расчетному значению А в формуле (3).
Выходной сигнал U элемента 3 деления пропорционален расчетному значению
А
ГП в
п
Сигнал U j является входным, сигналом нелинейного элемента 4, который выполнен на операционном усилителе 25, в обратную связь которого включены резистор 24 и стабилитрон 23. Коэффициент усиления нелинейного элемента 4 равен единице. Стабилитрон 23 ограничивает выходной сигнал U0fP нелинейного элемента 4 на уровне 1 О В при статическом моменте на валу электродвигателя, равном или меньшем 0,2 МН, что исключает выход сигнала Uof. за максимальный рабочий уровень изменений аналоговых сигнало устройства -10 В.
Сигнал U огр подается на второй вхо узла 11 ограничения. Таким образом, при изменении статического момента на валу электродвигателя изменяется величина сигнала U огр и, в режиме установившегося движения Uorp Uyo- Uic К0 c.j .
Реализация изобретения позволяет повысить частоту вращения электродвигателя и, следовательно, среднюю скорость движения исполнительного органа электропривода спуско-подъемного агрегата, что позволяет сократить общее время СПО на буровых установках.
Из расчетных механических характеристик электропривода лебедки буровой установки БУ-15000 (фиг. 4) видно, что частота вращения электродвигателя при управлении по закону постоянства циклового тока (кривая б) больше, чем при управлении по закону постоянства мощности (кривая а), что указывает на целесообразность использования данного принципа в системе регулирования электропривода СПА.
Формула изобретения
Система автоматического управления скоростью спуска и подъема колонны бурильных труб} содержащая задатчик частоты вращения, выход которого через фазочувствительный выпрямитель соединен с первым входом узла ограничения, выходы задатчика количества двигателей и датчика веса соединены с соответствующими входами узла выбора масштаба, выход узла ограничения через задатчик интенсивности соединен с входом узла регулирования скорости электропривода, источник напряжения смещения и нелинейный элемент, отличающаяся тем, что, с целью повышения точности управления за счет регулирования частоты вращения электропривода при поддержании постоянного уровня среднеквадрати- ческих потерь в якоре, система снабжена элементом вычитания и элементом деления, при этом выход узла выбора масштаба соединен с первым входом элемента вычитания, выход которого подключен к первому входу элемента
деления, выходы источника напряжения смещения соединены с вторыми входами соответственно, элемента вычитания и элемента деления, выход послед- ,него подключен к входу нелинейного элемента, а выход нелинейного элемента соединен с вторым входом узла ограничения.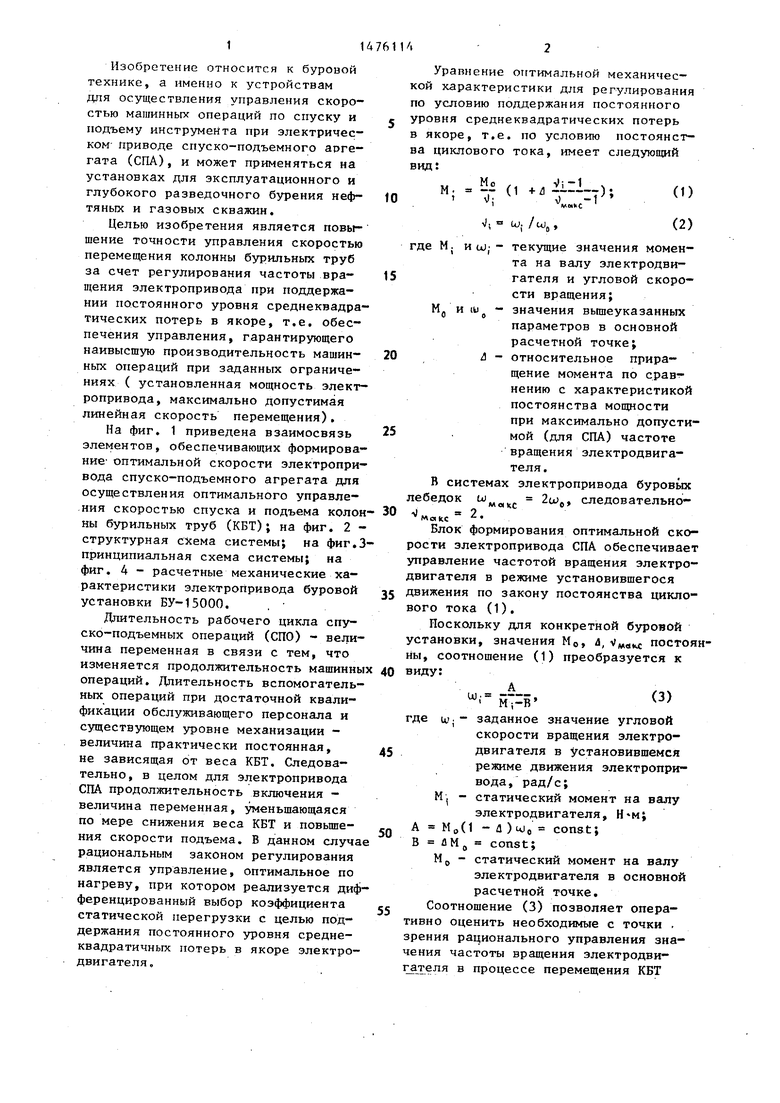


| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2225067C1 |
| Регулятор частоты для асинхронного тягового электропривода | 1982 |
|
SU1026275A1 |
| Устройство для поддержания постоянной скорости резания | 1979 |
|
SU875338A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
Изобретение относится к электроприводу /ЭП/ спускоподъемного агрегата и позволяет достичь высокой точности управления скоростью перемещения колонны бурильных труб за счет регулирования частоты вращения ЭП. Устройство снабжено последовательно соединенными элементом вычитания и элементом деления, которые включены между узлом выбора масштаба и нелинейным элементом. Выход источника напряжения смещения подключен к вторым входам элемента вычитания и элемента деления. Сигнал с выхода задатчика 9 частоты вращения через фазочувствительный выпрямитель 10 поступает на первый вход узла ограничения /УО/ 11. Выходной сигнал УО 11 ограничен сигналом, определяющим необходимую частоту вращения ЭП в функции момента нагрузки и поступающим на его второй вход с выхода блока формирования оптимальной скорости /БФОС/ 6 спуско-подъемного агрегата. Сигнал с выхода УО 11 через задатчик 12 интенсивности, определяющий допустимую величину ускорения в процессе разгона ЭП, поступает на узел 13 регулирования ЭП и является сигналом задания его частоты вращения. Входы узла выбора масштаба являются входами БФОС 6 и соединены соответственно с выходами задатчика 7 веса и задатчика 8 количества двигателей, а выход нелинейного элемента является выходом БФОС 6. Это обеспечивает управление частотой вращения ЭП в режиме установившегося движения по закону постоянства среднеквадратических потерь в якоре. 4 ил.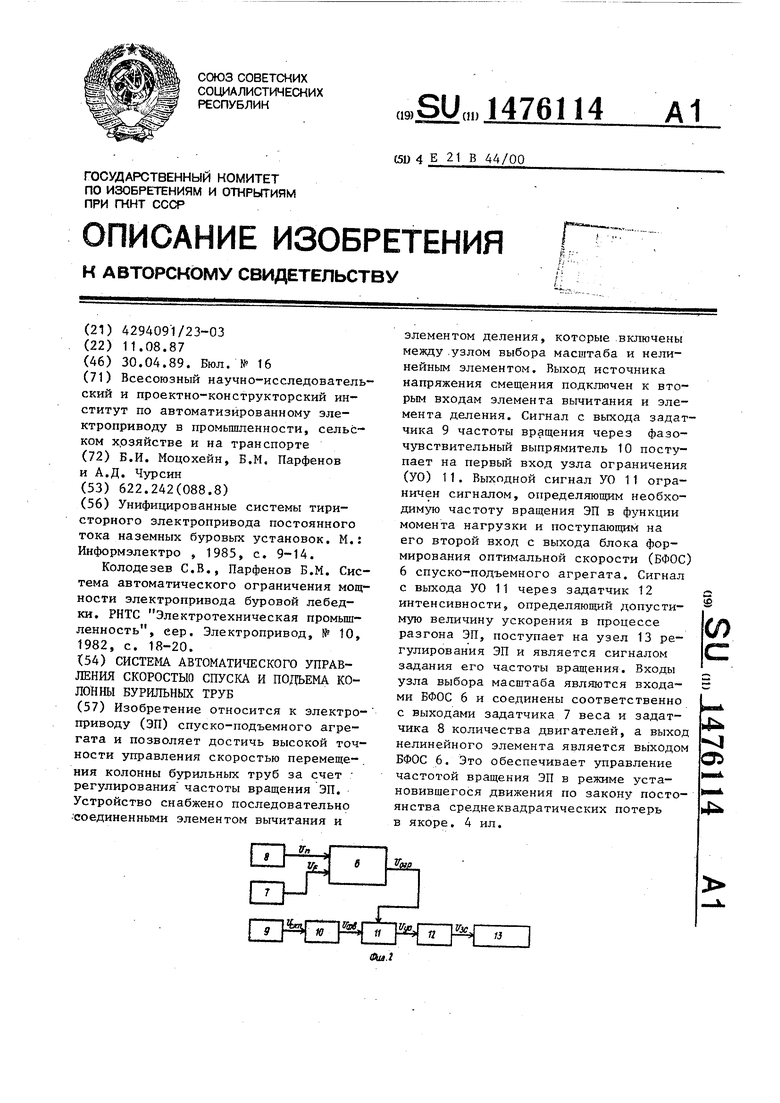
L
раф
iPeeJ
| Унифицированные системы тири- сторного электропривода постоянного тока наземных буровых установок | |||
| М.: Информэлектро , 1985, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Колодезев С.В., Парфенов Б.М | |||
| Система автоматического ограничения мощности электропривода буровой лебедки | |||
| РНТС Электротехническая промышленность, еер | |||
| Электропривод, № 10, 1982, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
