.
1
Изобретение относится к медицинской технике, а TO4Eiee к травматологии и ортопедии.
Целью изобретения является обеспечение регулируемого совмещения кост- ных отломков при угловых деформациях
На фиг, 1 изображен компрессион- но-дистракционный аппарат, фронтальная проекцияI на фиг, 2 - , горизонтальная проекция, на фиг. 3 - то же, профильная проекция;на фиг. 4 то же, наложенный на вывихнутом плече; на фиг, 5 то же,наложенный на вправленном плече; на фиг. 6 фрагмент аппарата, наложенный на плечевой кости при винтообразном переломе; на фиг. 7 - фрагмент аппарата, наложенный на плечевой кости при ротационном смещении костных отломков; на фиг, 8 - фрагмент аппарата, наложенного на предплечье при переломе Галеации; на фиг.9- исправленньй: перелом Галеации; на. фиг. 10 - фрагмент аппарата, наложенного на предплечье при переломах локтевой и луче вой костей..
Аппарат преимущественно применяется при лечении переломов верхних конечностей.
л, -
Аппарат содержит каркас I сварной
из металлических трубок по ,сц1ине сои меримьй с длиной руки. Для удобства расположения аппарата относительно грудной клетки торцовые ребра 2 и 3 каркаса выполнены дугообразными с вогнутостью от грудной клетки. Два верхних продольных ребра 4 выполняют роль направляющих. На другом торце каркаса 1 закреплена передвижная траве1)са 5 с винтовой тягой 6. Каж- дый винт винтовой тяги 6 имеет гайку 7 и зажим 8 для удерживания тросика 9. Винтовая тяга 6, гайки 7 зажимы 8 и тросики 9 образуют узел дист- ракции. В аппарате предусмотрено до четырех узлов репозиции. В каяэдый узел репозиции входит разборная рама 10, в которой фиксируется кольцо 11 тремя регулировочными винтами 12 с гайками 13, стойки 14, сп;ицы 15 и шарниры, состоящие из фиксирующего основания 16, зажимной планки 17,винтов 18 крепления. Рама 10 соединяется каркасом с помощью шарнира посредством болтов 19 и жестко фиксиру- ется при их завинчивании. Стойки 14 крепятся к кольцу 11 гайками и служа для шарнирной связи регулировочных
в
2255
5.
- - 0
3fi
з- 305Sт
582
винтов 12 с кольцом 11, 10 имеют дополнительную кинематическую связь с каркасом через растяжки 20 и шины 21, расположенные с другой стороны шарниров. Это необходимо для постепенного и дозированного наклона узла репонирования в зависимости от сложности перелома кости. Все рамы 10 связаны с помощью червячных штанг 22 с гайками 23. В каждом кольце 11 количество спиц 15 определяется в зависимости от сложности перелома. Рамы 10 могут быть дополнительно к1- нематически связаны между собой резьбовыми стержнями 24, Аналогично можно взаимно связывать дополнительно кольца 11 резьбовыми стержнями 25.
Аппарат работает следующим образом.
Каждый узел репозиции можно перемещать по продольньм ребрам 4 и по ,червяч11ым штангам 22, Для этого отвинчиваются гайки 23 в сторону предлагаемого перемещения узла репозиции и руками одномоментно или постепен- (но и дозированно завинчиванием гаек 123 с другой стороны шарнира рама 10 перемещается в требуемое положение. Затем гайки 23 с обеих сторон шарнира завинчиваются.
Одномоментный наклон узла репозиции осу1дествляется следующим образом.
В шарнире отвинчивается болт 19 на один-два оборота. В этом случг .е рама 10 свободно поворачивается на болтах 10 вокруг их оси. Придав раме 10 требуемый наклон, болты 19 туго завинчиваются, и следовательно, узел репозиции зафиксирован с зaдaнньE углом наклона. Для . постепенного и дозированного наклона одной из рам 10 используется растяжка 20. Вращая растяжки 20 в том или ином направлении, рама 10, а следовательно, и весь узел репозиции постепенно или дозированно меняюФ наклон относительно своего исходного положения и соседних узлов репозиции.
г
Каждое кольцо 11 или скобу можно вращать вокруг оси руки одномоментно, постепенно или дозированно. При одновременном моменте вращения отломки кости стойки 14 закрепляются на кольце рядом с регулировочными вин- тами 12. Если предусматривается постепенная или дозированная ротация отломка, то используется только два регулировочных винта 12, При этом ,в исходном положении оси вращения
3
регулировочных винтов 12 проходят через центр кольца 11. Гайки 13 на этих двух винтах 12 отвинчиваются на несколько оборотов и кольцо 11 поворачивается одномоментно на предполагаемый угол ротации в направлении, противоположном ротации отломка кости, увлекая его за собой через спицы. Гайками 13 фиксируются регулировочные винты 12 в достигнутом положении. Аналогичным способом можно ломать неправильно сросшуюся кость и далее репонировать отломки костИз добиваясь правильного их сопоставления. Кольцу 11 можно одномоментно придавать наклон в любом направлении относительно плоскости рамы 10.
В практике репозиции отломков возникает необходимость, кроме одномоментного наклона кольца 11, сделат постепенный или дозированный наклон. Такая манипуляция достигается следующим образом. Из двух смежных колец 11 одно фиксируется в раме 10 жестко, а другое удерживается в раме двумя горизонтально расположенными регулировочными винтами 1 2 . Эти два кольца 11 с использованием стоек 14 связываются в верхних частях резьбовым стержнем 25. Путем подвин чивания гаек на резьбовом стержне 25 второе кольцо 11 наклоняется постепенно или дозированно относительно первого кольца 11.
Аппарат используется следующим образом.
При дозированном вправлении застарелого вывиха плеча (фиг. 4 и 5) после подготовки операционного поля через акромион лопатки на стороне повреждения проводятся две перекрестные 2 мм спицы 15 в сагиттальной плоскости, которые фиксируются в натянутом состоянии одним кольцом 11 после отделения их от кожи салфетками
и резиновыми пробочками. Две другие перекрестные спицы 15 Киршнера проводятся через средне-верхнюю часть плечевой кости в плоскости ее поперечного сечения и фиксируются в натянуто состоянии вторым кольцом 11, Третьи пары спиц 15 Киршнера аналогично проводятся в нижней трети плечевой кости и фиксируются в натянутом состоянии в третьем кольце 11. Второе и третье кольца 11 соединяются тремя резьбовыми стержнями 25. Больной укладывается на спину (ли255584
цом вверх), поврежденная рука располагается в компрессионно-дистракцион- ном аппарате. Первое кольцо 11 жестко фиксируется регулировочными винтами 5 12 в раме 10. Тяговыми тросиками 9 ближайшее к ним кольцо 11 соединяется с траверсой 5. Завинчиванием гаек 7 на тяговых тросиках 9, которые увлекают за собой связку из среднего
10 и крайнего колец 11, фиксируется плечевая кость. При такой постепенной дистракции преодолевается мьш ечная ретракция и растягиваются рубцовые ткани-; Головка плечевой кости при
)5 этом смещается вниз под край суставной впацтал. Окончательное вправление вывихнутой головки плеча достигается использованием репозиционного узла на средней раме 10. Для этого
20 кольцо 11 рамы 10, приближенной к торцовым ребрам 2 и 3, фиксируется к этой раме 10. Используя регулировочные винты 12 постепенно и дозированно перемещают связку колец,включа25 ющую среднее кольцо 11 и кольцо 11, связанное с тросиками 9 во фронтальной плоскости и сагиттальной до полной центрации головки плеча в суставной впадине.
2Q На заключительном этапе, когда по рентгенограммам будет установлено вправление , связка колец 11 тремя резьбовыми стержнями соединяется с другим крайним кольцом 11. В результате такого соединения получается система из кольца 11 со связкой колец 11, в которой надежно зафиксирована лопатка и плечевая кость в нормальном положении. На этом дозированное вправление застарелого вывиха заканчивается . Система колец 11 с поврежденной рукой высвобождается из аппарата и укладывается на отводящую шину, сделанную из фанеры и гипсовых винтов. Эту шину больной носит в течение шести недель с последующей постепенной разработкой движений в плечевом суставе.
При винтообразном переломе плечевой кости (фиг. 6) поврежденную ру ку фиксируют в аппарате и дают трак- цию по длине за локтевой отросток поврежденной руки. Общепринятым способом обрабатывается операционное поле на плече отступя от линии перелома
5 плечевой кости около 3 см. В дисталь- ный конец проксимального ее отломка в плоскости поперечного сечения плеча с учетом -топографии сосудов и нер35
40
5
BOB проводятся две перекрестные спицы 15 толщиной 2 мм, которые фиксируются в натянутом состоянии кольцом 11. Аналогично проводятся спицы 15 в дистальный отломок плечевой кости и фиксируются в натянутом состоянии другим кольцом 11. Поврежденная рука с кольцами 11 помещается в предлагаемый аппарат для окончательного со- поставления и удержания в достигнутом положении фрагментов плечевой кости. Ближайшее к плечевому суставу кольцо 11 фиксируется к первой от плечевого сустава раме 10 (фиг.1) тремя регулировочными винтами 12.Скоба известным способом захватывается узлом дистракции (винтовая тяга 6, гайка 7, зажим 8, тросик 9) и дается тракция по длине, чем устраняют- ся грубые угловые смещения отломков плечевой кости и смещение по длине. Кольцо 11 с дистальным отломком фиксируется в другой раме Ю сначала только двумя горизонтальными регули- ровочными винтами 12. Ротационное (или вращательное) постепенное или дозированное смещение дистального отломка плечевой кости достигается вращением кольца 1 1 с дистальш м отломком двумя регулировочными винтами 12. В этом случае в исходном положении горизонтальные винты 12 шарнир но соединены с этим кольцом 11 в верхней и нижней его части так,что при возвращении их в горизонтальное положение кольцо 11 совершит вращение на необходимый угол. После устранения ротационного смещения кольцо 1I дополнительно фиксируется вер- тикальным регулировочным винтом 12, Поперечное смещение во фронтальной и. сагиттальной плоскости устраняется вращением гаек 13 на регу шровочных винтах 12 в рамах аппарата 10. Для устранения оставшихся утловых смещений в зависимости от обстоятельств можно применить : наклон второй рамы 10 относительно первой рамы 10 с использованием стержня 24 (фиг. 1): наклон кольца 11, находящегося во второй раме 10, относительно кольца 11, находящегося в первой раме 10, с использованием резьбового стержня 25, наклон кольца 11 относительно плоскости второй рамы 10, в которой зафиксировано это кольцо, с использованием различных шарнирных отверстий
в стойках 1Д; наклон второй ра№1 10 вместе с жестко зафиксированным кольцом 11, используя растяжки 20.
Компрессия и дистракция отломков плечевой кости во фронтальной плоскости достигается перемещением кольца 11 с дистальным отломком во второй раме 10 двумя регулировочными винтами 12. Вертикальный регулировочный винт 12 при этом отпущен. Компрессия и дистр)акция в сагитальной плоскости достигается перемещением этого же кольца 11 вертикальным регулировочным винтом 12 с одновременным ослаблением жесткости фиксации горизонтальных регулировочных винтов 12.
Винтообразный перелом плечевой кости .можно лечить аппаратом без гипсов повязки. В данном случае в каждый отломо ь- плечевой кости проводится по две пары спиц Киршнера (фиг. 7), из колец 11 создаются подсистемы А и В. Затем рука с подсистемами А и В помещается в аппарат предлагаемой конструкции, в котором производится репозиция отломков кости тракцией тро- сика.ми 9 за крайнее кольцо 1 1 системы А и последующими манипуляциями внутренних колец 11 обеих систем А и В, устраняя все виды смещений отломков плечевой кости.После сопоставления отломков и контроля рентгенограммами создается единая система из подсистем А и В путем соединения их червячными штангами 22. Рука освобождается из аппарата предлагаемой конструкции и подвешивается на косыночной повязке .
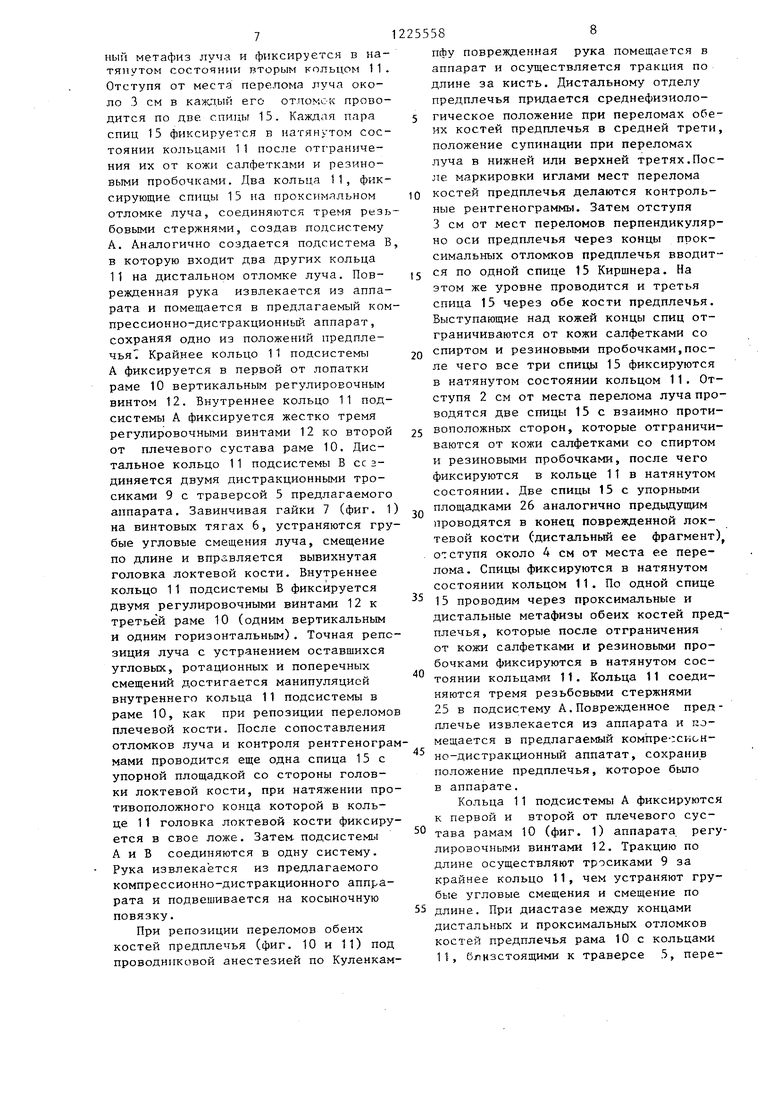
При перело ме лучевой кости и вывихе головки локтевой кости (перелом Галеации) (фиг. 8,9) поврежденная рука помещается в аппарате и дается тракция за кисть, придав определенное положение предплечью. Среднефи- зиологическое положение предплечью придается при переломах луча в средней трети и положение супинации при переломах луча в нижней или верхней третях. После обработки операционного поля проводится одна спица 15 Киршнера через проксимальные мета- физы обеих костей поврежденного.предплечья и фиксируется в натянутом состоянии кольцом 11 после отграничения ее от кожи салфетками со спиртом и резиновыми пробочками. Другая спица 15 Киршнера проводится через дисталь7
ный метафиз луча и фиксируется в натянутом состоянии вторым кольцом 11. Отступя от места перелома луча около 3 см в кажл.ый его отломок проводится по две спицы 15. Каждая пара спиц 15 фиксируется в натянутом состоянии кольцами 11 после отграничения их от кожи салфетками и резиновыми пробочками. Два кольца 11, фиксирующие спицы 15 на проксимальном отломке луча, соединяются тремя резьбовыми стержнями, создав подсистему А. Аналогично создается подсистема В в которую входит два других кольца 11 на дистальном отломке луча. Поврежденная рука извлекается из аппарата и помещается в предлагаемый ком прессионно-дистракционный аппарат, сохраняя одно из положений предпле- чья7 Крайнее кольцо 11 подсистемы А фиксируется в первой от лопатки раме 10 вертикальным регулировочным винтом 12. Внутреннее кольцо 11 подсистемы А фиксируется жестко тремя регулировочными винтами 12 ко второй от плечевого сустава раме 10. Дис- тальное кольцо 11 подсистемы В ее з- диняется двумя дистракционными тросиками 9 с траверсой 5 предлагаемого аппарата. Завинчивая гайки 7 (фиг. 1 на винтовых тягах 6, устраняются грубые угловые смещения луча, смещение по длине и вправляется вывихнутая головка локтевой кости. Внутреннее кольцо 11 подсистемы В фиксируется двумя регулировочными винтами 12 к третьей раме 10 (одним вертикальным и одним горизонтальным). Точная репозиция луча с устранением оставшихся угловых, ротационных и поперечных смещений достигается манипуляцией внутреннего кольца 11 подсистемы в раме 10, как при репозиции переломо плечевой кости. После сопоставления отломков луча и контроля рентгенограмами проводится еще одна спица 15 с упорной площадкой со стороны головки локтевой кости, при натяжении противоположного конца которой в кольце 11 головка локтевой кости фиксируется в свое ложе. Затек подсистемы А и В соединяются в одну систему. Рука извлекается из предлагаемого компрессионно-дистракционного аппра- рата и подвешивается на косыночную повязку.
При репозиции переломов обеих костей предплечья (фиг. 10 и 11) под проводниковой анестезией по Куленкам255588
пфу поврежденная рука помещается в аппарат и осуществляется тракция по длине за кисть. Дистальному отделу предплечья придается среднефизиоло5 гическое положение при переломах обеих костей предплечья в средней трети, положение супинации при переломах луча в нижней или верхней третях.После маркировки иглами мест перелома
10 костей предплечья делаются контрольные рентгенограммы. Затем отступя 3 см от мест переломов перпендикулярно оси предплечья через концы проксимальных отломков предплечья вводит 5 ся по одной спице 15 Киршнера. На этом же уровне проводится и третья спица 15 через обе кости предплечья. Выступающие над кожей концы спиц отграничиваются от кожи салфетками со
2Q спиртом и резиновыми пробочками,после чего все три спицы 15 фиксируются в натянутом состоянии кольцом 11. Отступя 2 см от места перелома луча проводятся две спицы 15 с взаимно проти25 воположных сторон, которые отграничиваются от кожи салфетками со спиртом и резиновыми пробочками, после чего фиксируются в кольце 11 в натянутом состоянии. Две спицы 15 с упорными площадками 26 аналогично предьщущим проводятся в конец поврежденной локтевой кости Сдистальный ее фрагмент) отступя около 4 см от места ее перелома. Спицы фиксируются в натянутом состоянии кольцом 11. По одной спице
15 проводим через проксимальные и
дистальные метафизы обеих костей предплечья, которые после отграничения от кожи салфетками и резиновыми пробочками фиксируются в натянутом состоянии кольцами 11. Кольца 11 соединяются тремя резьбовыми стержнями 25 в подсистему А.Поврежденное предплечье извлекается из аппарата и помещается в предлагаемый компреосион но-дистракционный аппатат, сохранив положение предплечья, которое было в аппарате.
Кольца 11 подсистемы А фиксируются к первой и второй от плечевого сус тава рамам 10 (фиг. 1) аппарата регулировочными винтами 12. Тракцию по длине осуществляют тросиками 9 за крайнее кольцо 11, чем устраняют грубые угловые смещения и смещение по
55 длине. При диастазе между концами дистальньгх и проксимальных отломков костей предплечья рама 10 с кольцами 11, близстоящими к траверсе 5, пере40
мещается в сторону локтевого сустава как соединяются резьбовыми стержнями
вращением гаек 23 на червячных штангах 22 (фиг. 1). После контроля мест
переломов рентгенограммами кольца 11, аппарата и подвешивается на косыноч- установленные на проксимальных отлом- ной повязке.
25 с подсистемами А в единую cиcтeм Рука извлекается из предлагаемого
.2
19
i
/2
rx
16
17 Ю
п
Y
11
б
иг.д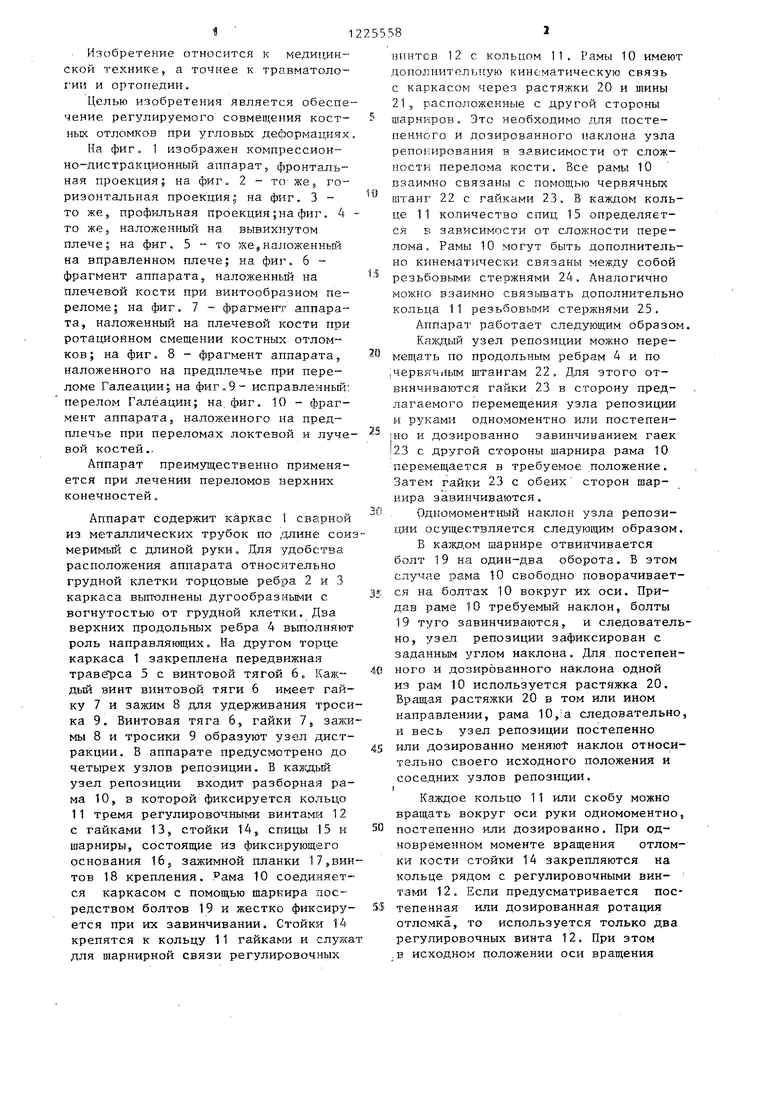



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ ВНУТРИСУСТАВНЫХ ПЕРЕЛОМОВ ДИСТАЛЬНОГО ОТДЕЛА ПЛЕЧА | 2007 |
|
RU2361531C1 |
| СПОСОБ ЛЕЧЕНИЯ ЛОЖНЫХ СУСТАВОВ ЛАДЬЕВИДНОЙ КОСТИ | 2014 |
|
RU2567816C1 |
| Компрессионно-дистракционныйАппАРАТ | 1979 |
|
SU839514A1 |
| Аппарат для лечения переломов плечевой кости | 1981 |
|
SU980700A1 |
| Способ лечения чрезмыщелковых переломов плечевой кости у детей после неоднократных неудачных репозиций | 2022 |
|
RU2803613C1 |
| УСТРОЙСТВО ДЛЯ ДИСТРАКЦИОННОГО ОСТЕОСИНТЕЗА ОБЛАСТИ ЛУЧЕЗАПЯСТНОГО СУСТАВА | 2012 |
|
RU2488362C1 |
| РЕПОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЧРЕЗ- И НАДМЫЩЕЛКОВЫХ ПЕРЕЛОМОВ ПЛЕЧЕВОЙ КОСТИ У ДЕТЕЙ | 1999 |
|
RU2160566C1 |
| Компрессионно-дистракционный аппарат | 1980 |
|
SU935093A1 |
| СПОСОБ ОТКРЫТОЙ РЕПОЗИЦИИ И ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ ДИСТАЛЬНОГО ОТДЕЛА ЛУЧЕВОЙ КОСТИ | 2015 |
|
RU2601850C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕЛОМА ИЛИ ПОСЛЕДСТВИЙ ТРАВМ ДИАФИЗА КОСТИ(ЕЙ) ПРЕДПЛЕЧЬЯ | 2012 |
|
RU2493791C1 |


// у // W
1Z
/2
66
Фиг.
PU
Фиг. 5
uf.7
ЛН
в-«
Pus.8 исходное положение
15
15
Фиг. 9 Достиену пое гюложвмие
/
f
исходное noflotfiSHue Фае.Ю Аостивиутое noflo иeнu
Редактор С.Патрушева
Составитель Л.Поваров
Техред В.Кадар Корректор А.Обручар
Заказ 2017/4Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,, г. Ужгород, ул. Проектная, 4
9 8
6
| Компрессионно-дистракционныйАппАРАТ | 1979 |
|
SU839514A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
