Изобретение относится к измерительной технике и является усовершенствованием устройства по авт. св. № 1043482 для измерения перемещений объектов.
Цель изобретения - расширение функциональных возможностей путем обеспечения измерения с высокой точностью перемещений во втором направлении, перпендикулярном первому, т.е. одновременно в двух взаимно перпендикулярных направлениях, за счет более простой реализации тестового метода измерения.
На чертеже представлена принципиальная схема емкостного преобразователя перемещений.
Преобразователь содержит три основные и три дополнительные пары электродов, включенные каждая в свою измерительную схему (не показаны). Основные пары электродов включают неподвижный первый общий прямоугольный электрод 1 и установленные с возможностью перемещения относительно него электроды 2-4, соединенные общей электроизоляционной пластиной 5, связываемой в процессе измерения с контролируемым объектом (не показан). Подвижный электрод 3 смещен относительно подвижного электрода 2 в первом направлении измерения (в направлении оси X) на известное расстояние ДХэт. Размер h4 подвижного электрода 4 во втором направлении (в направлении оси Y) в K h2/h4 раз отличается от соответствующего размера 2 Ьз электродов 2 и 3. Начальная площадь перекрытия электрода 4 с электродом 1 равна начальной площади перекрытия электрода 3. Дополнительные пары электродов образованы теми же подвижными электродами 2-4 и вторым общим неподвижным электродом 6, имеющим Ш-образную форму с несимметричным размещением его выступов. Средний выступ электрода 6 смещен во втором направлении на известную величину ЛУэт. Электроды 2-4 имеют квадратную форму.
Преобразователь работает следующим образом.
Измеряемое перемещение объекта воздействует на пластину 5 и смещает подвижные электроды 2-4 относительно неподвижных электродов 1 и 6, изменяя площади их взаимного перекрытия. Сигналы, снимаемые с подвижных электродов, пропорциональны величинам этих площадей, которые в свою очередь определяются размерами h, электродов и величинами их перемещений в первом (X) и втором (Y) направлениях (, 3, 4).
Функции преобразования преобразователя могут быть представлены некоторым числом отрезков прямых вида:
NX,- а,-х + Ьхь(1)
Nj,,- оСу,-у+ bj,;,(2)
где Ыдг, и Nyi - выходные сигналы преобразователя при перемещениях объекта в направлении X и Y соответственно; о(х1, bxi, y,/i, byi - параметры функции преобразования, определяемые конструктивными физическими параметрами емкостного преобразователя.
Используя сигналы , и , N,,3 и N,,4, снимаемые одновременно с электро- дов 2-4, измеряемые перемещения после соответствующих преобразований систем уравнений (1) и (2) можно представить в виде
20
(3)
N,/4-Ny3 Дуэт У- N,4-Ni,3 К-1
(4)
Из выражений (3) и (4) следует, что параметры Q, и Ь, функции преобразования не входят в конечное выражение для измеряемых перемещений X и Y, так что дрейф их значений не влияет на точность измерений.
Таким образом, преобразователь позволя- ет измерять перемещения контролируемых объектов в двух взаимно перпендикулярных направлениях с повыщенной точностью.
Формула изобретения
Емкостный преобразователь перемещений по авт. св. № 1043482, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения измерения с высокой точностью перемещений во втором направлении, перпендикулярном первому, он снабжен вторым общим электродом, имеющим Ш-образную форму с несимметричным размещением выступов и размещенным параллельно первому общему прямоугольному электроду по другую сторону от электродов, установленных с возможностью
перемещения, выступы Ш-образного электрода ориентированы в первом направлении, а его средний выступ смещен относительно соседних выступов во втором направлении перемещения на известную величину.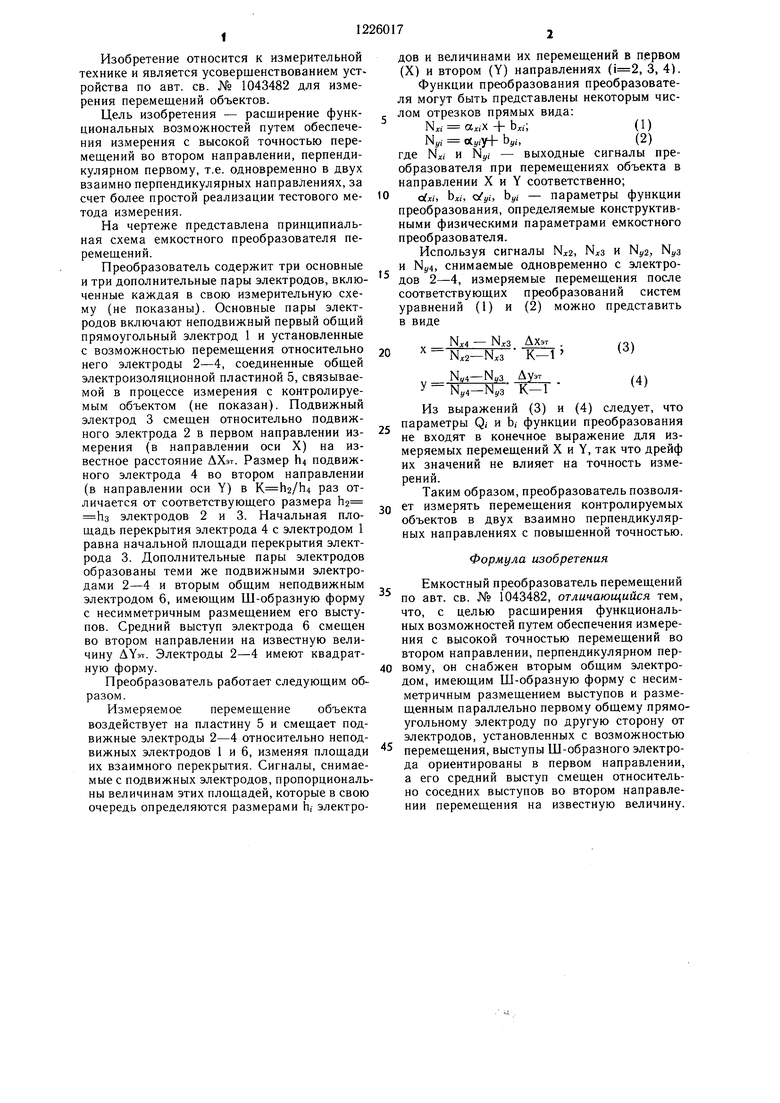
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный емкостный преобразователь перемещений | 1988 |
|
SU1599644A1 |
| Емкостной преобразователь перемещений | 1982 |
|
SU1043482A1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2007 |
|
RU2351896C1 |
| Емкостный преобразователь перемещения | 1979 |
|
SU926527A1 |
| Интегральный микромеханический гироскоп-акселерометр | 2019 |
|
RU2716869C1 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК | 2007 |
|
RU2334237C1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР-КЛИНОМЕТР | 2005 |
|
RU2279092C1 |
| Дифференциальный емкостной преобразователь углового перемещения | 1990 |
|
SU1768954A1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2266521C1 |
изобретение относится к измерительной технике и может быть использовано для измерения перемещения объектов с высокой точностью одновременно в двух взаимно перпендикулярных направлениях путем болеее простой реализации тестового метода измерения. Емкостный преобразователь перемещений содержит три основные и три дополнительные пары электродов, включенные каждая в свою измерительную схему. Основные пары электродов включают неподвижный общий электрод и подвижные относительно него электроды, соединенные общей электроизоляционной пластиной, связываемой в процессе измерений с контролируемым объектом. Подвижный электрод смещен относительно подвижного электрода в направлении X на известное расстояние АХэт. Размер h4 подвижного электрода в направлении Y в K h2/h4 раз отличается от соответствующего размера электродов. Начальная площадь перекрытия электрода с электродом равна начальной площади перекрытия электрода. Дополнительные пары электродов образованы теми же подвижными электродами и вторым общим неподвижным электродом, имеющим Ш-образную форму с несимметричным размещением выступов. Средний выступ электрода смещен в напраи- лении Y на известную величину. Все подвижные электроды имеют квадратную форму. Измеряемое перемещение контролируемого объекта воздействует на пластину и смещает подвижные электроды относительно неподвижных электродов, изменяя площади их взаимного перекрытия. Сигналы, снимаемые с подвижных электродов, позволяют определить перемещение объекта, исключив при этом из результатов измерения параметры функций преобразования, что исключает влияние дрейфа их значений на результаты измерений и повышает точность преобразования перемещений. 1 ил. С ГчЭ ьо 05 о
| Емкостной преобразователь перемещений | 1982 |
|
SU1043482A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
