г
Изобретение относится к измерительной технике и может быть использовано для измерения угловых перемещений объектов.
Цель изобретения - повышение точности измерений путем исключения потерь информации при аварийном отключении напряжения питания датчика.
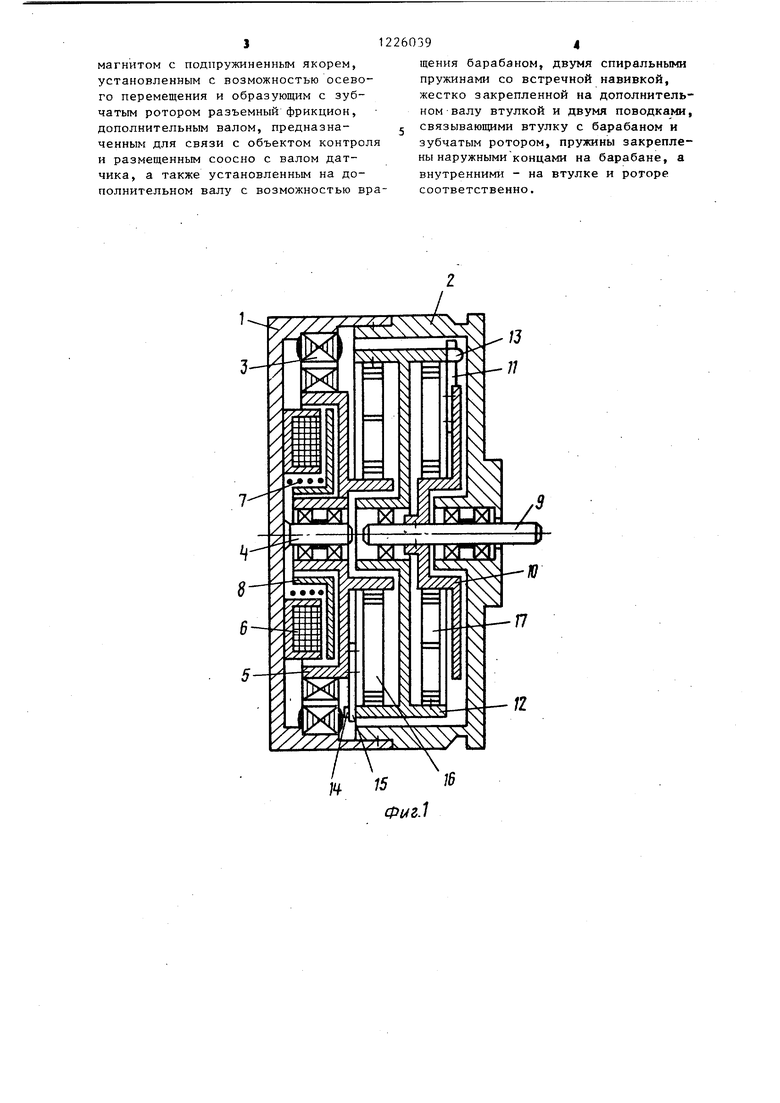
На фиг,1 представлена конструкция датчика угла; на фиг.2 - временные диаграммы, поясняющие работу датчика ( угол поворота объекта контроля; d- угол поворота зубчатого ротора; и - форма сигналов, поступающих с датчика на формирователь импульсов; F - форма импульсов на выходе формирователя импульсов; S - позиционный код на выход реверсивного счетчика импульсов). I
Датчик угла содержит корпус 1 с
крышкой 2. В корпусе 1 укреплен зубчатый статор 3 с обмотками возбуждения и считывания и размещенньм на валу 4 датчика зубчатый ротор 5. В корпусе 1 закреплен электромагнит с обмоткой 6 и подпружиненным пружиной 7 якорем 8. Последний установлен с возможностью перемещения вдол вала 4 датчика и -образует с зубчатым ротором 5 разъемный фрикцион для фиксации положения зубчатого ротора 5 в случае аварийного отключения питания от обмоток возбуждени датчика и обесточивания обмотки 6 электромагнита. Дополнительный вал 9 предназначенный для связи датчика угла с объектом контроля, установлен в подшипниковых опорах крышки 2 На валу 9 жестко закреплена втулка 10 с поводком 11 и установлен с возможностью вращения барабан 12 с выступом 13, контактирующим с поводком 11, выступом 14, контактирующим с поводком 15 зубчатого ротора 5. Барабан 12 связан с зубчатым ротором 5 и втулкой 10 с помощью плоских спиральных пружин 16 и 17 соответственно. Пружины 16 и 17 имеют встречную навивку и закреплены наружными концами на барабане 12, а внутренними - на зубчатом роторе 5 и втулке 10 соответственно. Обмотки считывания датчика угла подключены к формирователю импульсов и реверсивному счетчику (не по- казаны).
Датчик угла работает следующим образом.
260392
При подключении питания к обмоткам возбуждения датчика и обмотке 6 электромагнита последний срабатывает, притягивая якорь 8 и освобож5 дая зубчатый ротор 5. При угловом перемещении объекта контроля приводится во вращение дополнительный вал 9. Вращение вала 9 через втулку 10, поводок 11, выступы 13 и 14
10 барабана 12 и поводок 15 зубчатого ротора 5 передается на пQcлeдний. На обмотках считывания датчика появляются сигналы, которые формируются в формирователе импульсов и ре15 гистрируются реверсивным счетчиком.
Если в некоторьй момент t, (фиг.2)вследствие, например, аварийной ситуации отключается питание датчика, то обмотка 6 электромагни20 та обесточивается и якорь 8 под действием пружины 7 поджимается к зубчатому ротору 5, фиксируя его положение. Если угловое перемещение контролируемого объекта и вращение
25 вала.9 в период отключения питания продолжаются, то при заторможенном зубчатом роторе 5 происходит закручивание одной из спиральных пружин 16 или 17 (в зависимости от. направ30 ления вращения вала 9). После восстановления питания, например, в момент t (фиг.2) якорь 8 отхрдит от зубчатого ротора 5 и освобождает его. Зубчатый ротор 5 под действием
,, раскручивания соответствующей плоской пружины 16 или 17 к моменту to, приходит в положение, которое соответствует угловому положению контролируемого объекта и вала 9. В
дп процессе поворота зубчатого ротора 5 на выходе обмоток считывания формируются дополнительные сигналы, что исключает потерю информации о перемещении контролируемого объекта в
.f период аварийного отключения питания датчика.
Исключение потерь информации повышает точность измерений.
50
Формула изобретения
Датчик угла, coдepжaцp й корпус, размещенные в нем статор с обмотками возбуждения и считывания и укреп- ленный на валу зубчатый ротор, отличающийся тем, что, с целью повышения точности, он снабжен закрепленными в корпусе электромагнитом с подпружиненным якорем, установленным с возможностью осевого перемещения и образующим с зубчатым ротором разъемный фрикцион, дополнительным валом, предназначенным для связи с объектом контроля и размещенным соосно с валом датчика, а также установленным на дополнительном валу с возможностью вра
2260394
щения барабаном, двумя спиральными пружинами со встречной навивкой, жестко закрепленной на дополнительном валу втулкой и двумя поводками, связывающими втулку с барабаном и зубчатым ротором, пружины закреплены наружными концами на барабане, а внутренними - на втулке и роторе соответственно.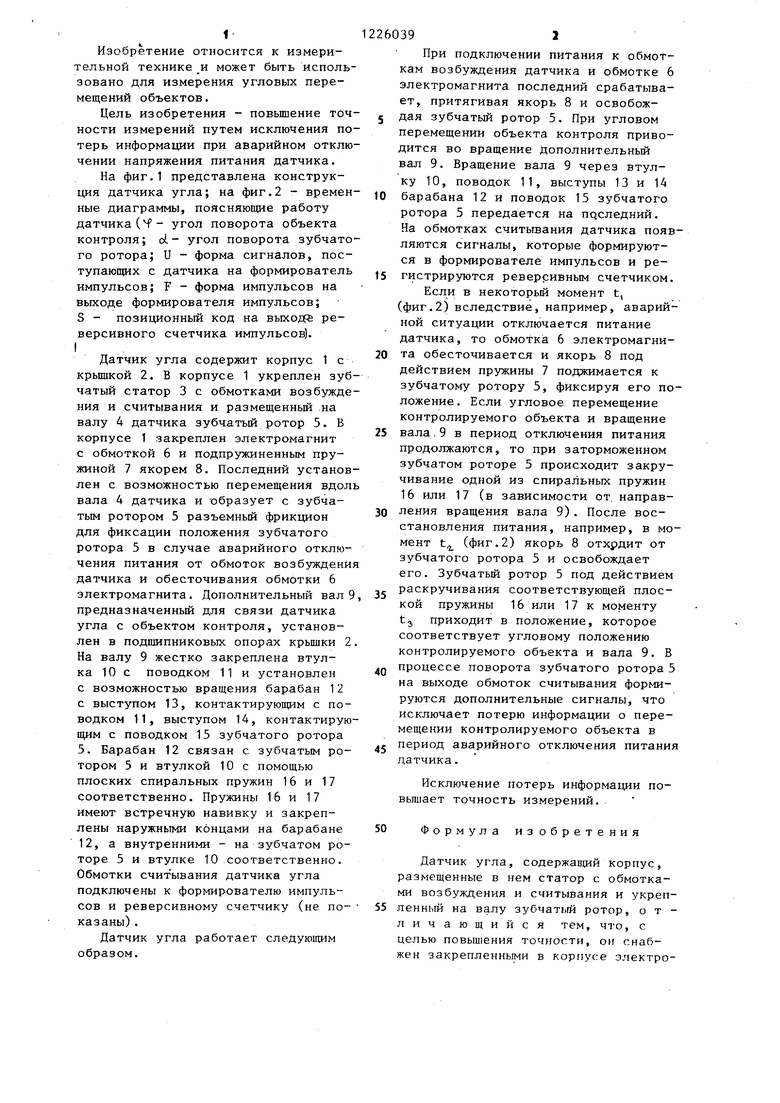
| название | год | авторы | номер документа |
|---|---|---|---|
| Инклинометр | 1982 |
|
SU1102914A1 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| Рудничный кабельный электровоз | 1937 |
|
SU57625A1 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| Печатающий узел устройства для выборочного ударного печатания | 1979 |
|
SU885071A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
| ИСПОЛНИТЕЛЬНОЕ КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 2019 |
|
RU2707879C1 |
Изобретение относится к измерительной технике и может быть использовано для повышения точности измерения угловых перемещений объектов путем исключения потерь информации при аварийном отключении напряжения питания датчика угла..Датчик угла содержит корпус с крышкой. В корпусе укреплен зубчатьй статор с обмотками возбуждения и считывания и размещенный на валу датчика зубчатый ротор, В корпусе закреплен электромагнит с обмоткой и подпружиненным пружиной якорем. Якорь образует с зубчатым ротором разъемный фрикцион для фиксации положения зуб- чатого- ротора в случае аварийного отключения питания датчика и обес- точивания обмотки электромагнита. Ротор датчика связывается с контролируемым объектом через дополнительный вал, на котором жестко закреплена втулка и установленный с возможностью вращения барабан. Барабан связан с зубчатым ротором и втулкой с помощью плоских спиральных пружин, имеющих встречную навивку. Вращение вала передается ротору датчика через поводки, выступы и пружины. При этом на выходе датчика появляется последовательность сигналов. При отключении напряжения питания якорь поджимается к ротору и фиксирует его угловые положения. Если объект,.а следовательно, и вал при этом .продолжают вращаться, происходит закручивание пружин (в зависимости от направления вращения). В результате после восстановления напряжения питания на обмотку электромагнита начинает подаваться питание,, и ротор, освобождаясь от фиксации, и вследствие раскручивания пружин приходит в согласованное с положением ,вала угловое положение. Потерь информации об угловом положении объекта благодаря этому не происходит, 2 ил. (Л ьо tc О5 о 00 со
/J
.1
и.
f A/iVN
Редактор О.Юрковецкая
Составитель Л.Гуськов
ТеХред Н.Бонкало Корректор М.Самборская
Заказ 2110/28Тираж 670 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,д.Д/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная, 4
-AlWv
Фиг2
| Преобразователь перемещений | 1978 |
|
SU769307A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1982 |
|
SU1019220A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
