Группа изобретений относится к области машиностроения и может быть использована в качестве многофункционального привода, электропривода и преобразователя возвратно-поступательного движения во вращательное и наоборот в промышленности, на транспорте и других отраслях техники.
Группа изобретений связана единым изобретательским замыслом, основанном на преобразовании механических движений в режиме накопления кинетической энергии, исключающем зависимость углового перемещения одного звена от величины линейного перемещения другого звена.
Аналогом инерционного двигателя комбинированного является известный комбинированный двигатель, работа которого может совершаться как чисто парового двигателя, так и комбинированного парового двигателя с двигателем внутреннего сгорания, в цилиндре которого расположены движущиеся друг другу навстречу два поршня, средняя полость между которыми может служить как камерой сжатия двигателя внутреннего сгорания, так и паровым цилиндром для работы паром по прямоточному принципу, а внешние полости служат для работы на паре. В средней части цилиндра расположено устройство, восстанавливающее или изменяющее объем камеры сжатия. Устройство для перехода с чисто парового цикла работы двигателя на комбинированный и обратно выполнено в виде клапана с поршнем, управляемым пневматически или гидравлически с поста управления, а также применен газовый толкатель для подачи топлива, связанный с камерой сжатия (см. изобретение СССР N 57213, МПК F 01 B 29/06, з. 16.02.39 г., оп. 31.05.40).
Недостатком такого устройства является наличие большого количества подвижных звеньев, присущее устройствам, основанным на принципе работы кривошипно-шатунного механизма.
Наиболее близким по технической сущности к заявляемому инерционному двигателю комбинированному является известный двигатель, содержащий оппозитно расположенные цилиндры, размещенные в них поршни, попарно связанные между собой штоками, два подпружиненных клапана и механизм преобразования возвратно-поступательного движения поршней во вращательное движение, установленного в опорах вращения выходного вала с шестерней отбора мощности, имеющий зубчатый планетарный механизм внутреннего зацепления с солнечным колесом и входящим в зацепление с ним сателлитом, установленным на водиле вала и связанным со штоком с помощью пальца, сочлененного с сателлитом (патент Франции N 1302393, кл. F 02 B, оп. 1962 г. - прототип).
Недостатками прототипа являются ограниченность функциональных возможностей, громоздкость и сложность конструкции, низкие КПД, экономичность, надежность и срок службы.
Аналогом инерционного электродвигателя может служить известное устройство, рекуперирующее энергию на переменных режимах работы при изменении момента инерции ротора, содержащее массивные поршни, равно расположенные по окружности ротора, выполненного в виде маховика, совмещенного с рабочим органом. На роторе установлены постоянные магниты, взаимодействующие с магнитоиндукционными катушками статора, а в роторе выполнены заполненные жидкостью радиальные каналы по числу поршней. Каждый поршень подвижно установлен в одном из каналов, а на каждом поршне и на стенках каждого канала установлены фиксирующие манжеты для синхронизации движения поршня (изобретение СССР N 1462023, МКИ4 F 03 G 7/08, з. 29.12.86 г., оп. 28.02.89 г.).
Недостатком известного устройства является сложность его конструкции и низкая технологичность.
Наиболее близким по технической сущности к заявляемому инерционному электродвигателю является устройство для рекуперации энергии колебаний, содержащее закрепленный на раме корпус, генератор, совмещенный с преобразователем, выполненным в виде зубчатого сектора, соосно закрепленного на рычаге подвески, промежуточной передачи, упруго закрепленной на валу, а генератор состоит из подвижных ротора и статора, установленных на общем валу, имеющем шестерни отбора мощности. Ротор и статор взаимодействуют между собой через зубчатые венцы роликовых муфт и сателлиты, установленные на свободных осях и зафиксированные в корпусе, имеющем обмотки электромагнита, обмотки их питания и изолированные токосъемники. Ротор оборудован обмотками возбуждения и питания, а статор - полюсами из постоянных магнитов и рабочими обмотками с коллектором (изобретение СССР N 1449699, МКИ4 F 03 G 7/08, B 60 C 13/14, з. 10.11.86 г., оп. 07.01.89 г. - прототип).
Недостатками известного прототипа инерционного электродвигателя являются сложность и громоздкость конструкции, низкие КПД, экономичность и надежность.
Аналогом инерционного преобразователя является механический обратимый преобразователь движения, содержащий внутренний и внешний цилиндры и промежуточный элемент в виде шариков, в котором внутренний цилиндр имеет несколько одинаковых винтовых канавок, на внешнем цилиндре выполнены кольцевые проточки, число которых равно числу кольцевых канавок, а во внешнем цилиндре на шарикоподшипниках размещены диски с диаметральными прямолинейными канавками (изобретение СССР N 294975, МПК F 16 H 25/18, з. 17.01.69 г., оп 04.11.71 г.).
Известный механизм преобразования вращательно-поступательных движений с обратимостью передачи при линейных и нелинейных характеристиках преобразования движений с неподвижным одним цилиндром требует наличия дополнительных элементов: дисков с канавками и шарокоподшипниками, усложняющих конструкцию.
Наиболее близким по технической сущности к заявляемому объекту является преобразователь, включающий концентрично расположенные цилиндры и размещенный в корпусе толкатель, кинематически связанные посредством поводков, установленных на поверхность цилиндра с возможностью вращения вокруг своих осей и размещенных в канавках толкателей. Цилиндр жестко установлен на валу двигателя и жестко связан с корпусом толкателя. Толкатель установлен с ограничением от поворота фиксатором с возможностью только линейного перемещения в пределах длины паза корпуса. Однопериодные канавки толкателя расположены в плоскостях, проходящих под углом, меньшим 90o, к оси толкателя (изобретение СССР N 1528979, МКИ 4 F 16 H 25/08, з. 23.11.87 г., оп. 15.12.89 г. - прототип).
Недостатком прототипа является ограниченность функциональных возможностей преобразованием вращательного движения только в возвратно-поступательное с зависимостью линейного перемещения толкателя от углового перемещения цилиндра, низкая нагрузочная способность конструкции, ее сложность и невысокий КПД, обусловленный указанной выше зависимостью.
Задача, положенная в основу группы изобретений, заключается в создании простых и надежных инерционных устройств: комбинированного двигателя, электродвигателя и преобразователя, обеспечивающих повышение КПД, экономичность изготовления и увеличение сроков службы.
Поставленная задача решается тем, что в инерционном двигателе комбинированном, содержащем оппозитно расположенные цилиндры, в которых размещены поршни, связанные с механизмом преобразования, два подпружиненных клапана и, установленный в опорах вращения выходной вал с шестерней отбора мощности, механизм преобразования выполнен в виде инерционного электродвигателя, на фланцах которого закреплены цилиндры, а поршни жестко связаны с челноком инерционного электродвигателя посредством втулок, пропущенных через осевые отверстия фланцев, а стержень каждого из клапанов пропущен через поршень и размещен во втулке с возможностью взаимодействия с поршнем своим торцевым выступом. Цилиндры выполнены с ребрами жесткости, разделяющими в окружном и осевом направлениях полости впуска воздуха, выпуска газа и полости, в которых размещены датчики, элементы системы управления и элементы топливной аппаратуры. Выходной вал выполнен фланцевым и к нему подсоединен распределитель, сообщающийся с каналами, выполненными во фланцевом валу, цилиндрах, а также в роторе инерционного электродвигателя. Толкатели элементов топливной аппаратуры пропущены через радиальные отверстия фланцев инерционного электродвигателя и установлены с возможностью взаимодействия с торцами челнока инерционного электродвигателя. Выполнение механизма преобразования в виде инерционного электродвигателя и размещение стержней клапанов во втулках, жестко связывающих челнок инерционного электродвигателя с поршнями, возможность взаимодействия торцов челнока с толкателями элементов топливной аппаратуры, а также наличие распределителя, выполнение полостей и каналов позволяет получать простую и надежную конструкцию многофункционального двигателя с высоким КПД. Кроме того, выполнение вырезов на торцах челнока по плоскости контакта с толкателями с периодичностью, определяющей фазу и последовательность подачи различных видов топлива в рабочие объемы цилиндров, также расширяют функциональные возможности двигателя.
Поставленная задача также достигается тем, что в инерционном электродвигателе, включающем установленный в опорах вращения преобразователь возвратно-поступательного движения во вращательное и индуктора, связанные с источником тока посредством коммутационной аппаратуры и токосъемных устройств, токосъемные кольца которых установлены на роторе преобразователя, сам преобразователь выполнен инерционным, индукторы размещены в обоймах и установлены оппозитно на внутренних плоскостях фланцев инерционного преобразователя, а торцы челнока инерционного преобразователя выполнены в виде стаканов, составляющих магнитную цепь инерционного электродвигателя. Зубчатые венцы, выполненные на внутренней цилиндрической поверхности челнока и на обоймах индукторов, позволяют улучшить пусковые и рабочие характеристики инерционного электродвигателя. Выполнение преобразователя возвратно-поступательного движения во вращательное инерционным с оппозитно установленными индукторами на фланцах, а также выполнение зубчатых венцов на станках челнока и обоймах индукторов позволяют челноку, под действием магнитного поля индукторов, приобретать поступательное и вращательное движение относительно ротора и вращательное движение совместно с ротором с приращением энергии вращательного движения, повышающим КПД.
Поставленная задача достигается и тем, что в инерционном преобразователе возвратно-поступательного движения во вращательное и наоборот, включающем внешний и внутренний барабаны, один из которых, являясь ротором, установлен в опорах вращения с ограничением осевого перемещения, другой установлен концентрично с возможностью вращательно возвратно-поступательного движения относительно ротора, являясь челноком, кинематически связан с ротором посредством сателлитов, установленных с возможностью вращения вокруг своих осей в гнездах на цилиндрической поверхности одного барабана и размещенных в замкнутых нарезках на цилиндрической поверхности другого барабана.
Согласно изобретению, челнок с возможностью вращения и возвратно-поступательного движения относительно ротора и вращательного движения совместно с ротором, т.е. все звенья выполнены подвижными, образующими дифференциальный механизм. Нарезки, в которых размещены сателлиты, выполнены по траектории, координаты которой соответствуют координатам линии взаимного пересечения цилиндрической поверхности с поверхности геометрических тел, основания профилей которых образуют правильный многоугольник с четным числом сторон, вписанный в окружность цилиндрической поверхности, а вершины профилей геометрических тел направлены по образующей цилиндрической поверхности, противоположно в чередующей последовательности. Это позволяет получить многопериодные профильные нарезки и в сочетании с другими признаками, указанными выше, обеспечивает накопление энергии вращательного движения инерционного преобразователя и исключает жесткую зависимость углового перемещения выходного звена от линейного перемещения входного звена. Кроме того для улучшения пусковых характеристик, инерционный преобразователь снабжен храповым механизмом, ограничивающим одно из направлений вращательного движения челнока относительно ротора.
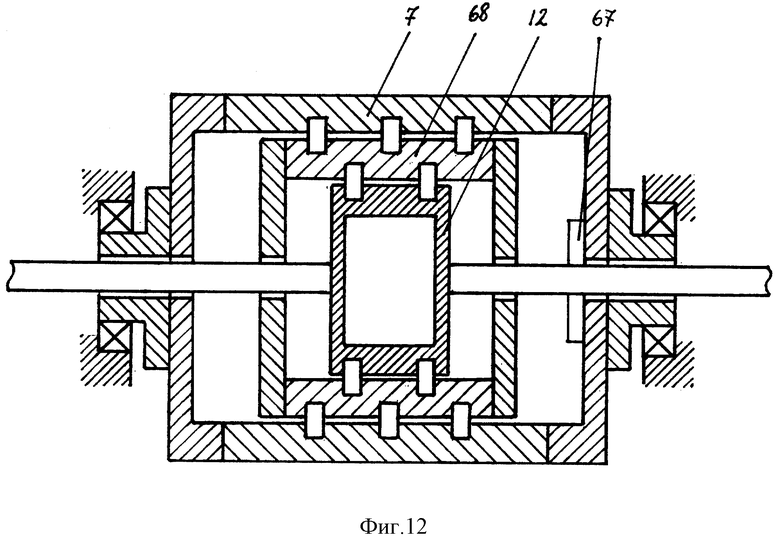
Для снижения ударных нагрузок инерционный преобразователь снабжен также как минимум одним упругим элементом, размещенным между фланцами барабанов. Кроме того, по меньшей мере, в одном фланце внешнего барабана выполнено осевое отверстие для пропуска элемента привода или исполнительного механизма. Для расширения диапазона рабочих характеристик и увеличения момента сил инерционный преобразователь может быть снабжен промежуточным барабаном, установленным между челноком и ротором и связанным с ними посредством сателлитов, аналогично размещенных в смежных цилиндрических поверхностях.
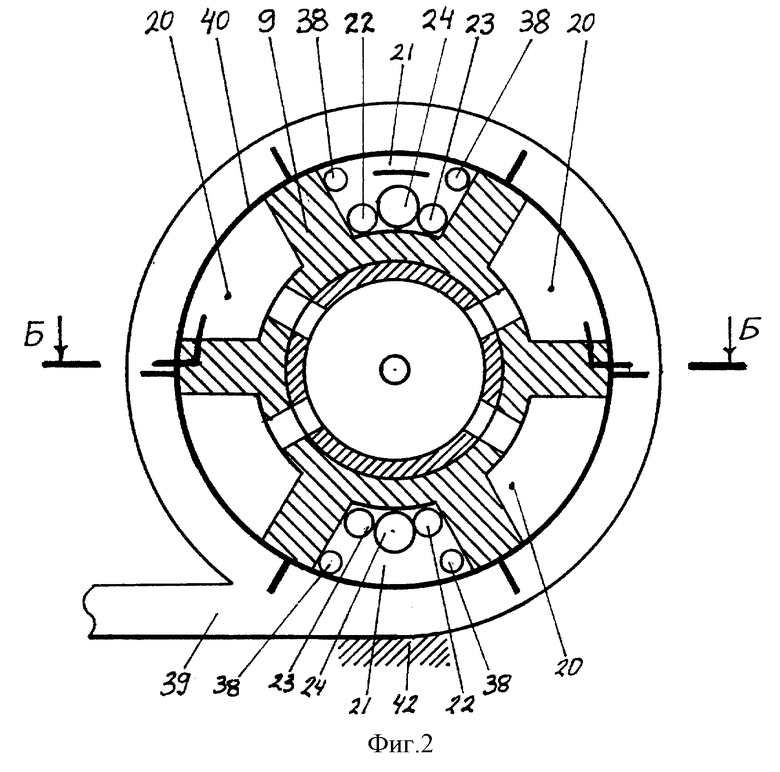
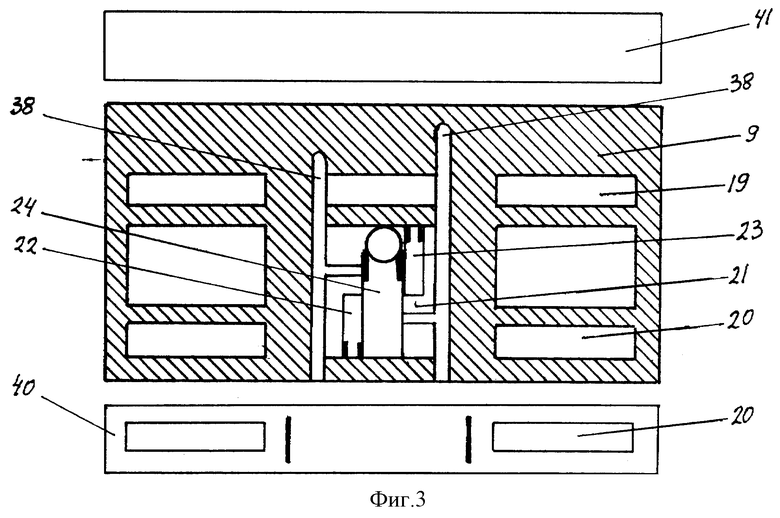
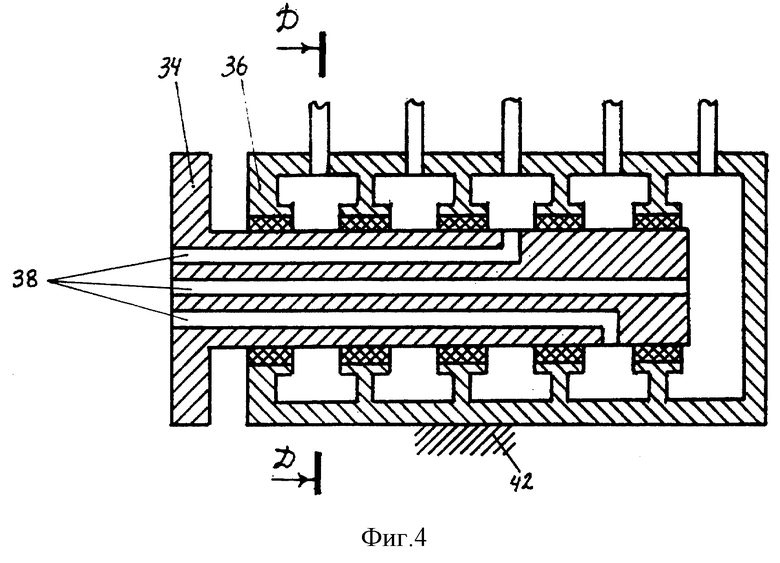
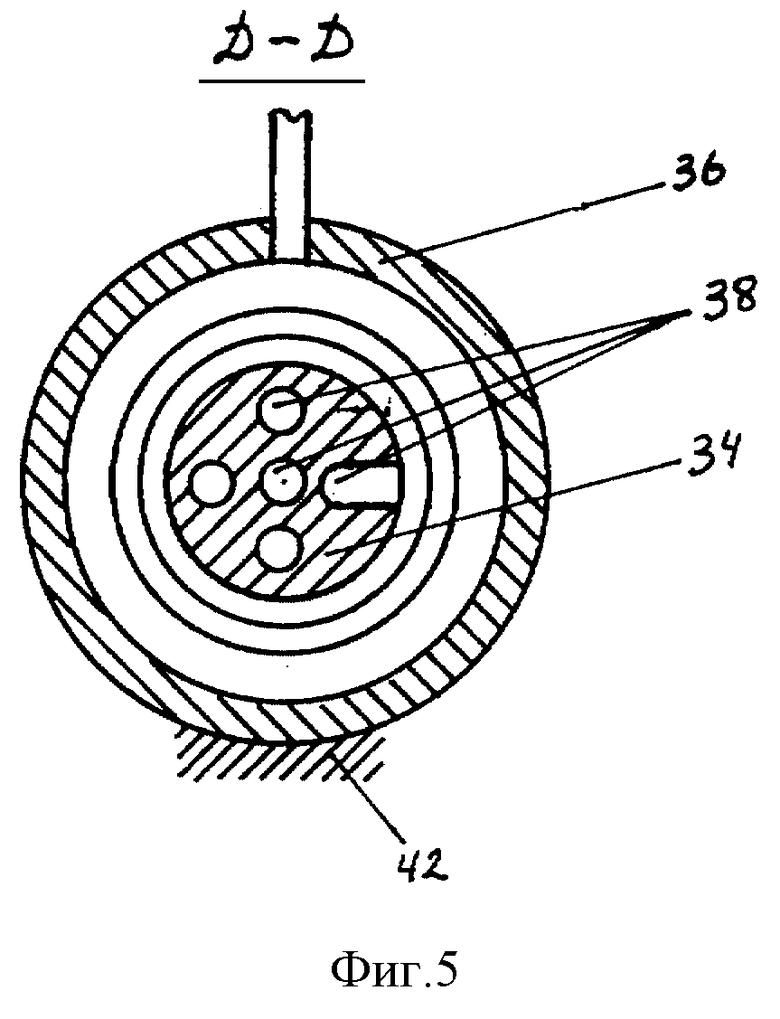
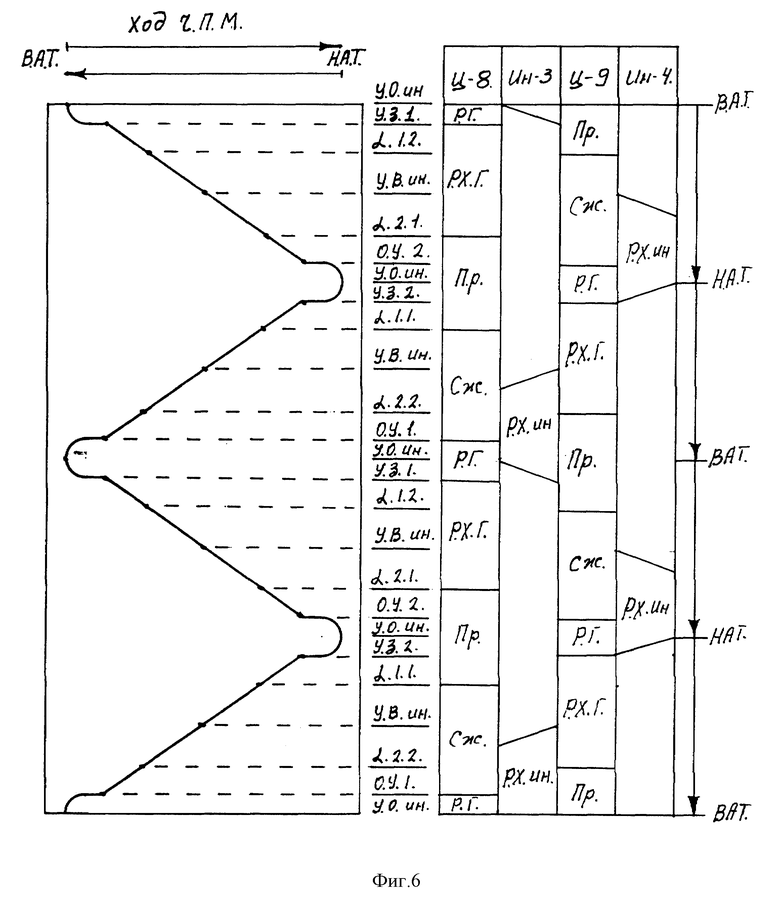
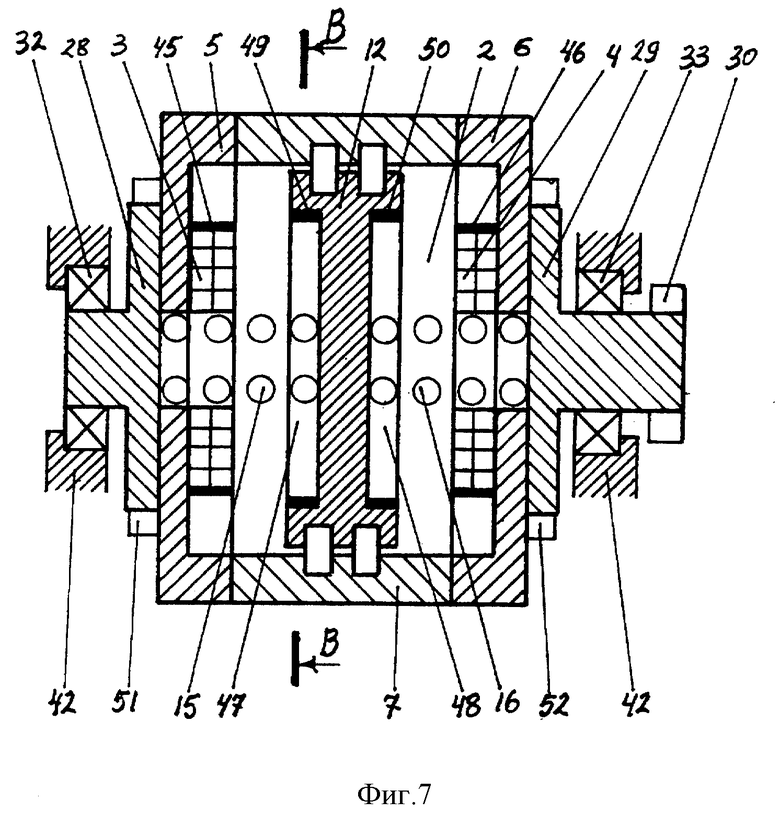
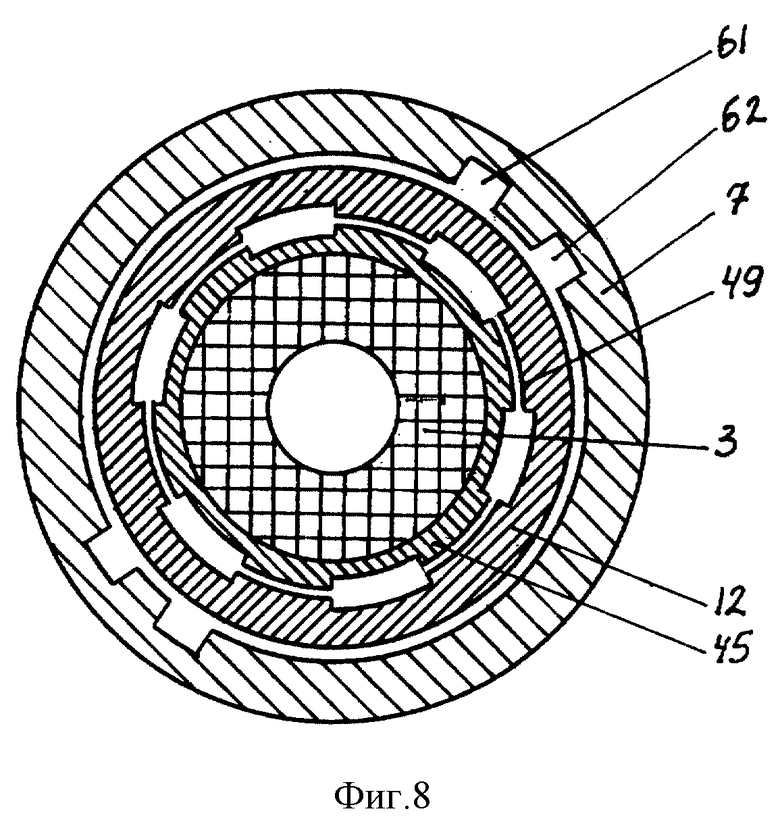
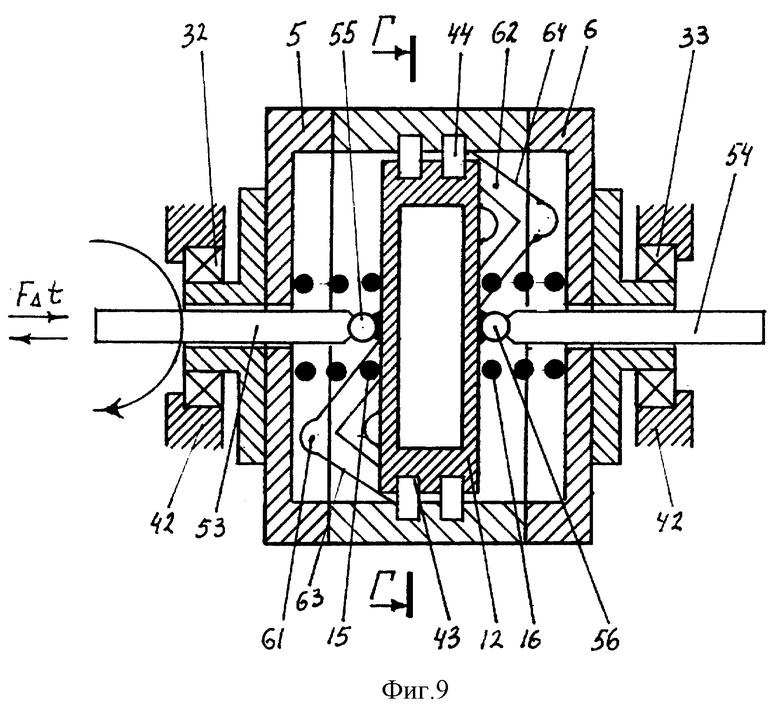
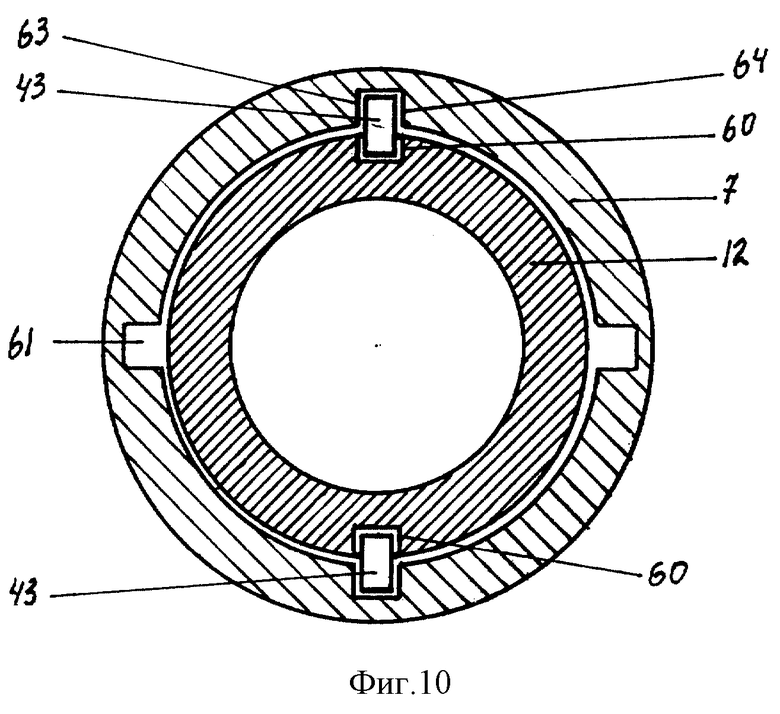
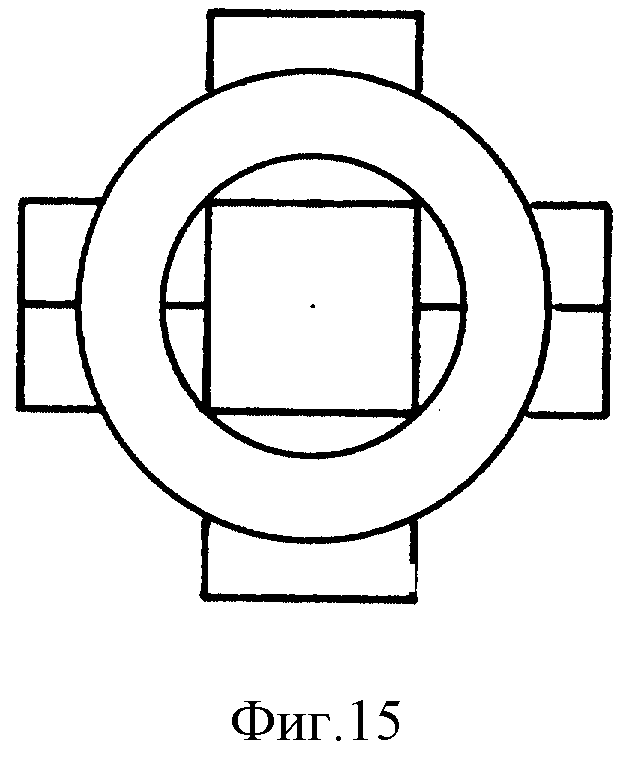
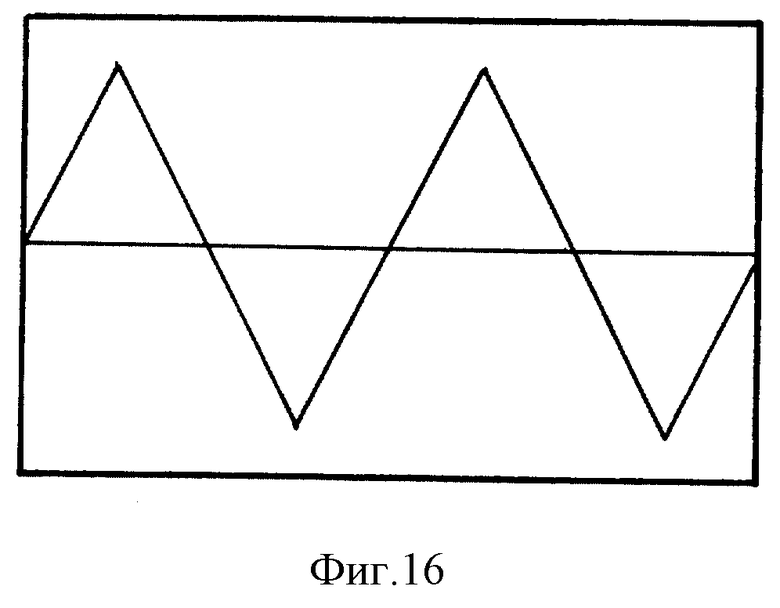
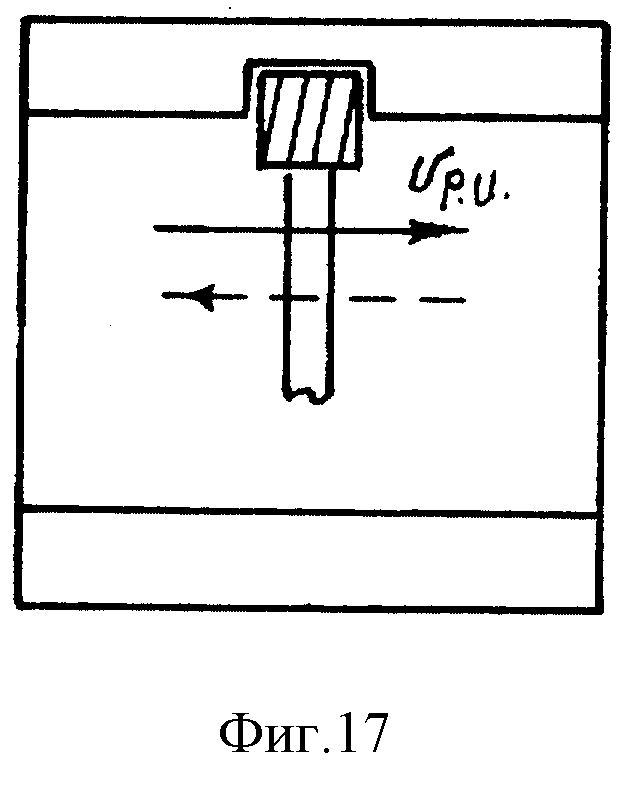
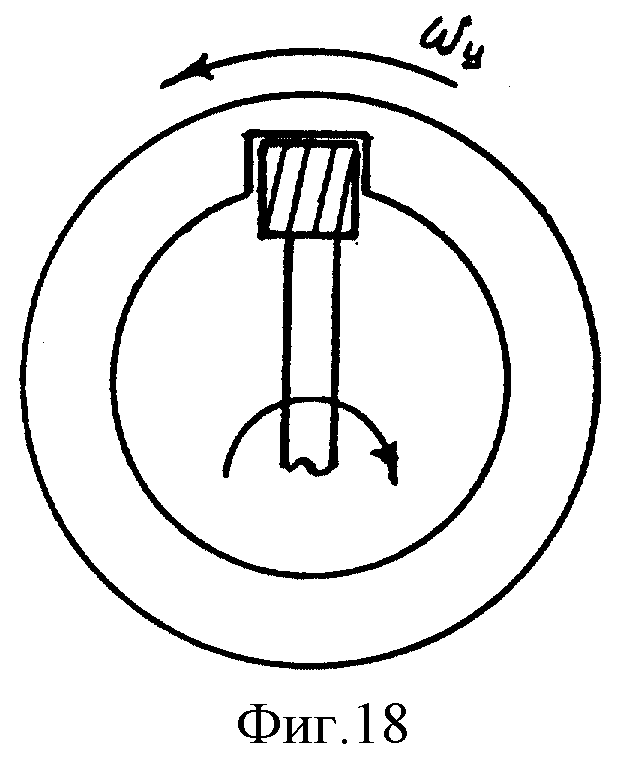
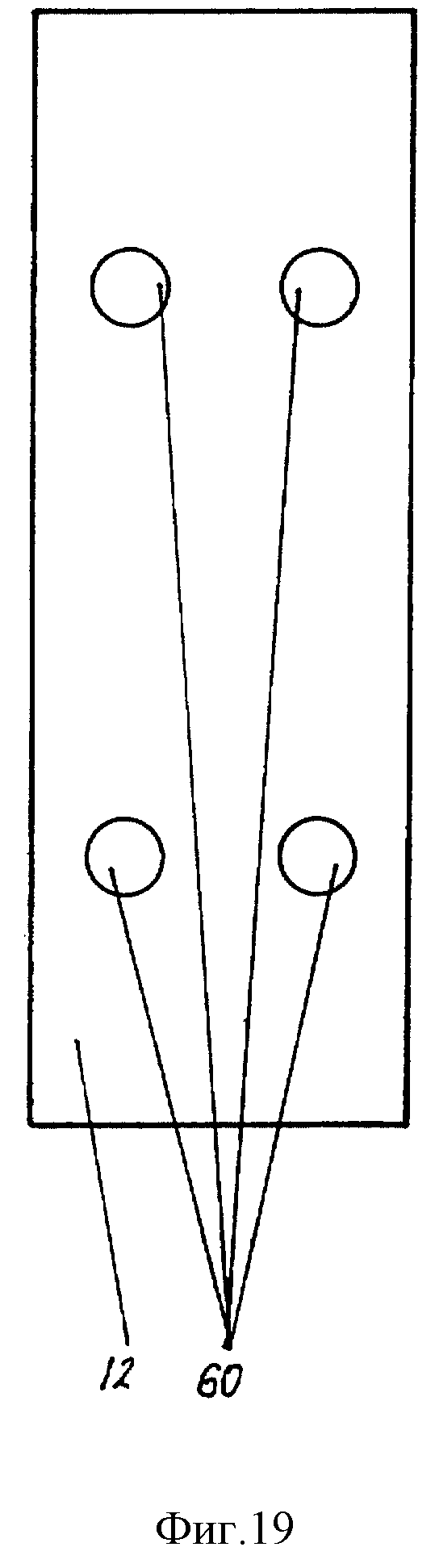
На фиг. 1 изображен инерционный двигатель комбинированный, общий вид в разрезе, на фиг. 2 - поперечный разрез А-А на фиг. 1, на фиг. 3 - сечение Б-Б (повернуто) по полостям цилиндра на фиг. 2, на фиг. 4 и 5 - пятиканальный распределитель с вращающимся напилем, на фиг. 6 - схема последовательности рабочих процессов инерционного двигателя комбинированного по траектории двухпериодных профильных нарезок, на фиг. 7 - инерционный электродвигатель, общий вид в разрезе, на фиг. 8 - поперечное сечение В-В на фиг. 6, на фиг. 9 - инерционный преобразователь, общий вид в разрезе, на фиг. 10 - поперечный разрез Г-Г на фиг. 9, на фиг. 11 - саталлит на фиг. 12 - инерционный преобразователь с промежуточным барабаном, общий вид в разрезе, на фиг. 13, 14 и 15 - проекции пересечения геометрических тел - равноразмерных трехгранных призм, с цилиндром, на фиг. 16 - развертка цилиндрической поверхности с линией перехода, определяющей траекторию двухпериодной кривой линии, на фиг. 17 и 18 - проекции нарезки прямоугольного профиля режущим инструментом, на фиг. 19 - развертка челнока, на фиг. 20 - развертка ротора.
Инерционный двигатель комбинированный (фиг. 1 - 6) содержит инерционный электродвигатель 1 с преобразователем 2 и индукторами 3 и 4, на фланцах 5 и 6 ротора 7 которого оппозитно закреплены цилиндры 8 и 9. Поршнем 10 и 11, расположенные в цилиндрах 8 и 9, жестко связаны с челноком 12 инерционного электродвигателя 1 посредством втулок 13 и 14, в которых размещены пружины 15 и 16 и стержни клапанов 17 и 18, пропущенные через поршни 10 и 11 и взаимодействующие с ними своими торцевыми выступами. Цилиндры 8 и 9 выполнены с ребрами жесткости, разделяющими в окружном и осевом направлениях полости 19 впуска воздуха, полости 20 выпуска газа и полости 21 размещения датчиков 22, элементов 23 системы управления и элементов 24 топливной аппаратуры. Толкатели 25 и 26 элементов 24 топливной аппаратуры пропущены через отверстия фланцев 5 и 6 и установлены с возможностью взаимодействия с торцами челнока 12, на которых выполнены вырезы 27, с периодичностью в окружном направлении, определяющей фазу и последовательность подачи топлива в рабочие объемы цилиндров. К выходным фланцевым валам 28 и 29 с шестернями отбора мощности 30 и 31, установленными в опорах 32 и 33 вращения, подсоединены посредством нипелей 34 и 35 распределители 36 и 37, камеры которых соединены с сообщающимися каналами 38, выполненными в валах 28 и 29, цилиндрах 8 и 9, а также в роторе 7 инерционного электродвигателя 1. Турбины 39 выпуска газа установлены на цилиндрах 8 и 9 посредством лопастных накладок 40, а на полости 19 впуска воздуха установлены глухие накладки 41, изолирующие эти полости от атмосферы. Опоры 32 и 33 вращения турбины 39 и распределители 36 и 37 установлены на стоках 42. Челнок 12 с сателлитами 43 и 44, а также поршни 10 и 11 с клапанами 17 и 18 и пружинами 15 и 16 образуют челночно-поршневой механизм.
Инерционный электродвигатель (фиг. 7, 8) состоит из инерционного преобразователя 2, на внутренних торцевых поверхностях фланцев 5 и 6 которого оппозитно установлены индуктора 3 и 4 в зубчатых обоймах 45 и 46. Торцы челнока 12 выполнены в виде стаканов 47 и 48, по цилиндрической поверхности которых выполнены зубчатые венцы 49 и 50, форма зубьев которых повторяет форму зубьев обойм 45 и 46. Между челноком 12 и фланцами 5 и 6 установлены пружины 15 и 16. Ротор 7 установлен в опорах 32 и 33 вращения стоек 42, фиксирующих его осевое перемещение, и снабжен тонкосъемными кольцами 51 и 52, связанными с источником тока посредством токосъемных устройств и коммутационной аппаратуры (на фиг. не показаны).
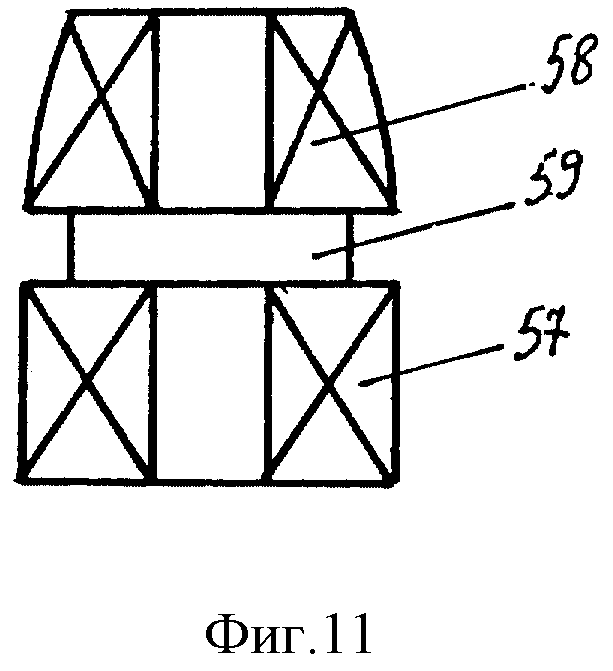
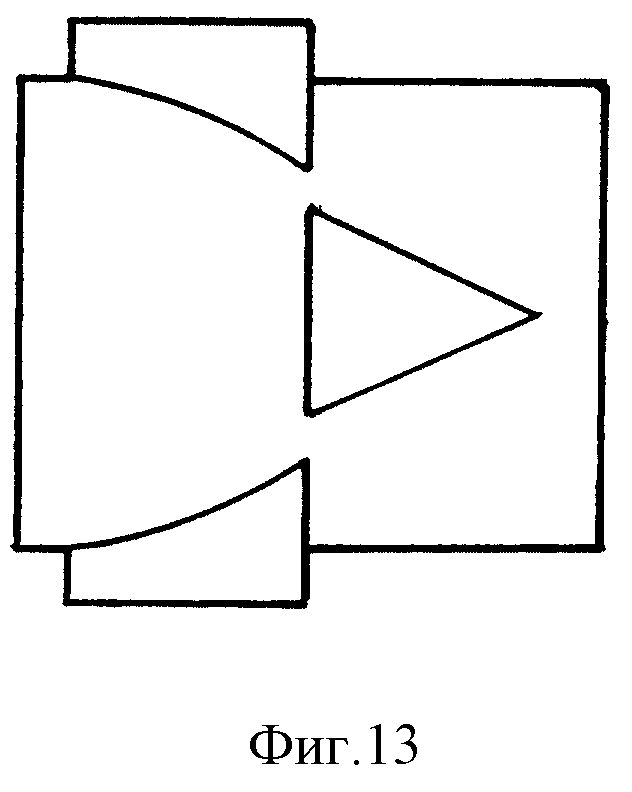
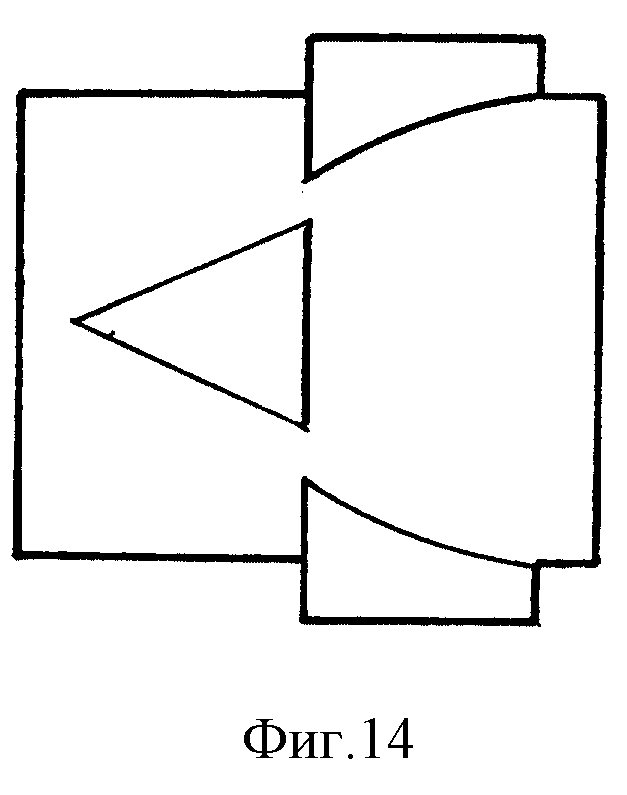
Инерционный преобразователь (фиг. 9-20) представляет собой дифференциальный механизм, состоящий из двух концентрично установленных один в другом барабанов: ротора 7 и челнока 12, взаимодействующих между собой посредством сателлитов 43 и 44. Ротор 7 установлен в опорах вращения с ограничением осевого перемещения относительно стойки 42, а челнок 12 связан с пропущенными через осевые отверстия фланцев 5 и 6, толкателями 53 и 54 посредством вращательно осевых соединений, в частности упорных подшипников 55 и 56, что обеспечивает челноку 12 возвратно-поступательное и вращательное движение относительно ротора 7 и вращательное переносное движение относительно стойки 42. Сателлиты 43 левой нарезки и 44 правой нарезки выполнены, каждый, в виде подшипников 57 и 58, установленных на общей оси 59 (фиг. 11). Подшипники 57 установлены в гнездах 60, выполненных равномерно по цилиндрической поверхности челнока 12, а подшипники 58 сателлитов 43, 44 размещены в выполненных на внутренней цилиндрической поверхности ротора 7 профильных нарезках 61 и 62 с возможностью поочередного качения по их боковым поверхностям 63 и 64. Профильные нарезки 61 и 62 выполнены симметрично относительно линии окружности по координатам пространственной периодической кривой замкнутой линии, соответствующей линии взаимного пересечения трехгранных призм с цилиндром (фиг. 13-16). Четное число геометрических тел, пересекающих цилиндр, определяет число периодов, высота основания (профиля) тел определяет амплитуду, а форма кривых линейчатых поверхностей (вместе показанных равнобедренных граней призм) определяет периодическую функцию траектории пространственной замкнутой кривой линии перехода поверхностей пересекающихся поверхностей геометрических тел. Основания призм представляют собой равнобедренные треугольники. Основания треугольников образуют правильный многоугольник с четным числом сторон, вписанный в окружность, линия которой размещены в центре цилиндра (в данном примере, квадрат), а вершины треугольников направлены противоположно в чередующейся последовательности. Число барабанов, периодические функции траекторий, число периодов и амплитуда профильных нарезок, а также число идентичных, смещенных одна относительно другой в осевом направлении профильных нарезок, выполненных на одной цилиндрической поверхности с целью повышения нагрузочной способности, являются параметрами, определяющими динамическую и механическую характеристики инерционного преобразователя. Каждому периоду каждой профильной нарезки соответствует один сателлит с ней взаимодействующий. Следовательно техническую характеристику инерционного преобразователя определяет, в частности следующее соотношение:
nст = (nБ-1)•nН•nПН,
где nст - число сателлитов;
nБ - число барабанов;
nН - число профильных нарезок;
nпн - число периодов профильных нарезок.
Амплитудные переходы 65 профильных нарезок 61 и 62 выполнены на внутренней цилиндрической поверхности фланцев 5 и 6, а ее активная часть 66 - на внутренней цилиндрической поверхности ротора 7. Форма выполнения амплитудных переходов 65 определяет межтактовый переходный процесс, т.е. время и траекторию движения челнока 12 относительно ротора 7 в период смены направления возвратно-поступательного движения.
Между фланцами 5, 6 и челноком 12 установлены пружины 15 и 16. Храповый механизм 67 установлен для фиксирования одного из направлений вращательного движения челнока 12 относительно ротора 7. В варианте выполнения инерционного преобразователя с промежуточным барабаном 68 (фиг. 12) сателлиты 43 и 44 размещены в смежных цилиндрических поверхностях барабанов аналогичным образом.
Нарезку прямоугольного профиля режущим инструментом (фиг. 17, 18) производят следующим образом.
К внутренней поверхности цилиндра, вращающегося с постоянной угловой скоростью ωц подводят режущий инструмент, перемещаемый по направлению образующей поверхности с линейной скоростью, изменяющейся по периодическому закону относительно окружности симметрии (о.с.), расположенной в центре цилиндра. Закон изменения во времени скорости перемещения режущего инструмента определяет траекторию нарезки. Профиль нарезки соответствует форме режущего инструмента и определяется с учетом минимального сопротивления взаимодействию сателлитов с боковыми поверхностями профильной нарезки.
При описании рабочего цикла инерционного двигателя комбинированного по тексту и в схеме последовательности рабочих процессов (фиг. 6) приняты следующие понятия и сокращения.
Амплитудные точки траектории профильных нарезок являются экспериментальными точками координатного положения челночно-поршневого механизма относительно ротора 7. Амплитудные точки, расположенные вблизи индуктора 3 и цилиндра 8, обозначены верхними. Амплитудные точки, расположенные вблизи индуктора 4 и цилиндра 9, обозначены - нижними.
Ход челночно-поршневого механизма равен расстоянию поступательного перемещения челночно-поршневого механизма от верхних амплитудных точек до нижних амплитудных точек, соответствующего половине периода траектории профильных нарезок 61 и 62, т.е. 180o периода.
Топливо "А" и Топливо "Б" - различные по свойствам виды топлива, или, компоненты химической реакции. И далее:
ИДК - инерционный двигатель комбинированный;
ИЭД - инерционный электродвигатель;
ИПД - инерционный пневмодвигатель;
ИГД - инерционный гидродвигатель;
ИТД - инерционный теплодвигатель;
ЧПМ - челночно-поршневой механизм;
Ц8, Ц9 - цилиндры (поз.8 и 9 фиг.1);
Ин.3, Ин.4 - индуктора (поз.3 и 4 фиг.1);
ВАТ - верхние амплитудные точки;
НАТ - нижние амплитудные точки;
Р.г. - процесс расширения газов;
Р.х.г. - рабочий ход Ч.П.М. под действием энергии расширения газов;
Р.х.ин. - рабочий ход Ч.П.М. под действием энергии индукторов;
Пр. - продувка рабочего объема цилиндра;
Сж. - сжатие в рабочем объеме цилиндра;
О.у.1 - оптимальный угол впрыскивания цилиндра 8;
О.у.2 - оптимальный угол впрыскивания цилиндра 9;
α 1.1. - угол закрытия окон цилиндра 8;
α 2.1. - угол открытия окон цилиндра 9;
α 1.2. - угол закрытия окон цилиндра 9;
α 2.2. - угол открытия окон цилиндра 9;
У.з.1 - угол задержки цилиндра 8 (регулируемый параметр);
У.з.2 - угол задержки цилиндра 9 (регулируемый параметр);
У.В.ин. - угол включения индуктора (регулируемый параметр);
У.О.ин. - угол отключения индуктора (регулируемый параметр).
Работа инерционного двигателя комбинированного осуществляется в режимах электродвигателя, пневмо-гидродвигателя и теплового двигателя.
Запуск ИДК производят в режимах ИЭД или ИПД или ИГД.
Работа ИДК в режиме ИЭД осуществляется следующим образом.
Импульс тока по цепи: источник тока коммутационная аппаратура - токосъемное устройство (на фиг. не показаны) - токосъемное кольцо 51 - индуктор 3, возбуждает в индукторе 3 магнитное поле, под действием которого ЧПМ приобретает поступательное движение в осевом направлении, а также вращательное движение относительно ротора 7. При этом взаимодействие сателлитов 43 и 44 с боковыми поверхностями 63 профильных нарезок 61 и 62 в точках их сопряжения образует вращающие моменты ротору 7 и ЧПМ согласно закону равенства действия и противодействия, т. е. М вр.р. = М вр.ЧПМ. Обладающие упругостью силовые линии магнитного поля при вращении ЧПМ относительно ротора 7 образуют в смещающихся зубцовых выступах венцов 49 относительно зубцовых выступов обоймы 45 индуктора 3 электромагнитный момент (М эл.), противодействующий М вр. ЧПМ-М эл. Реакцией для вращающего момента ИДК являются: момент инерции ЧПМ, кинетический момент вращательного движения ЧПМ, электромагнитный момент и момент сопротивления вращательному движению ЧПМ относительно ротора. В момент прохождения ЧПМ амплитудных переходов 65 размыкается цепь индуктора 3 и замыкается цепь индуктора 4, под действием магнитного поля которого, а также энергии сжатых пружин 15 и воздуха цилиндра 8, ЧПМ приобретает обратное поступательное движение. При этом осуществляется приращение энергии вращательного движения ИДК.
Работа ИДК в режиме ИПД осуществляется следующим образом.
Сжатый воздух от компрессора через рессивер и электромагнитные клапаны (на фиг. не показаны) подается в полость 19 впуска воздуха цилиндра 8. В момент времени, когда давление сжатого воздуха превысит усилие пружины 15 клапан 17 открывается, сжатый воздух поступает в рабочий объем цилиндра 8 и действует на днище поршня 10. В результате этого ЧПМ приобретает поступательное движение относительно ротора 7, энергия которого преобразуется в энергию вращательного движения ИДК. В момент открытия выпускных окон цилиндра 8 прекращается подача сжатого воздуха в его рабочий объем. В момент прохождения ЧПМ амплитудных точек профильных нарезок 61 и 62 сжатый воздух поступает в полость впуска и далее в рабочий объем цилиндра 9. Под действием энергии сжатого воздуха ЧПМ приобретает возвратное поступательное перемещение и осуществляется приращение энергии вращательного движения ИДК.
Работа ИДК в режиме ИГД осуществляется идентично работе в режиме ИПД.
Работа ИДК в режиме ИТД осуществляется с момента подачи топлива в топливную систему, содержащую топливный бак, насос, фильтры и трубопроводы (на фиг. не показаны) распределители 36 и 37, сообщающиеся с каналами 38. Применение различных по свойствам видов топлива "А" и "Б" или компонентов химической реакции, во внутреннем смесеобразовании позволяют получить оптимальные по времени и качеству процессы воспламенения и расширения рабочей смеси. Принцип действия ИДК в режиме ИТД рассматривается с момента времени, соответствующего началу движения ЧПМ из ВАТ в НАТ (фиг. 6). В момент времени, соответствующий положению ЧПМ в точке, определяемой углом α 1.2. цилиндра 9, клапан 18 закрывает впускное окно, а поршень 11 перекрывает впускные окна цилиндра 9, после чего в рабочем объеме цилиндра начинается процесс сжатия. В момент времени, соответствующий положению ЧПМ в точке α 2.1. цилиндра 8, поршень 10 начинает открывать выпускные окна, входят во взаимодействие с торцевым выступом стержня клапана 17, который начинает открывать впускное окно, после чего в рабочем объеме цилиндра 8 начинается процесс продувки.
В момент времени, соответствующей положению ЧПМ в точке, расположенной вблизи НАТ, определяемой углом опережения впрыскивания, торец челнока 12 контактирует с толкателями 26 элементов 24 топливной аппаратуры в режиме двухтактного двигателя и в цилиндр 9 впрыскивается топливо вида "А" и/или "Б". Осуществляется процесс внутреннего смесеобразования, воспламенения и расширения газов или химическая реакция.
Момент времени, соответствующий положению ЧПМ в НАТ определяет окончание первого такта и начало второго такта рабочего цилиндра ИДК. Под действием энергии расширения газов в цилиндре 9, а также энергии магнитного поля индуктора 3 и пружины 16 клапана 18, ЧПМ приобретает поступательное и вращательное движение относительно ротора 7 из НАТ в направлении ВАТ, а также переносное движение совместно с ротором 7. В момент времени, соответствующий положению ЧПМ в точке α 1.1. цилиндра 8, клапан 17 закрывает впускное окно, а поршень 10 перекрывает выпускные окна, после чего заканчивается процесс продувки и начинается процесс сжатия в рабочем объеме цилиндра 8. В момент времени, соответствующий положению ЧПМ в точке α 2.2. цилиндра 9, поршень 11 начинает открывать выпускные окна, а также посредством взаимодействия поршня 11 с торцевым выступом стержня клапана 18, начинает открываться впускное окно. После чего заканчивается процесс расширения газов - рабочий ход ЧПМ - и начинается процесс продувки в рабочем объеме цилиндра 9. В момент времени, соответствующий положению ЧПМ в точке, определяемой оптимальным углом, опережения впрыскивания челнок 12 и входит во взаимодействие с толкателями 25, посредством которых, через элементы 24 топливной аппаратуры в рабочий объем цилиндра 8 впрыскивается топливо вида "А" и(или) "Б".
После чего осуществляется процесс внутреннего смесеобразования, воспламенения и расширения газов (химическая реакция) в рабочем объеме цилиндра 8. Момент времени, соответствующий положению ЧПМ в ВАТ определяет окончание второго такта и начало последующих циклов рабочего процесса. При этом энергия возвратно-поступательного движения ЧПМ преобразуется в энергию вращательного движения ИДК. Система управления ИДК содержит взаимозависимые, систему управления ИТД и систему управления ИЭД и систему управления сжатым воздухом.
Управление ИТД осуществляется посредством пневмо или гидропривода. Давление воздуха или жидкости от органа управления ИДК по трубопроводу, через распределитель 37, сообщающиеся каналы 38 приводят в действие элементы 23 системы управления, регулирующие количество подаваемого топлива в цилиндры 8 и 9.
Управление ИЭД осуществляется посредством сравнения задающего сигнала, получаемого органа управления ИДК, с сигналом обратной связи, получаемым от датчика угловой скорости ИДК, а также посредством сигналов, получаемых от датчиков положения ЧПМ, взаимодействующих с толкателями 25 и 26, и сигнала, пропорционального индуктивному сопротивлению каждого из индукторов 3 и 4, зависящему от положения ЧПМ относительно индукторов.
В системе управления ИЭД регулируемыми параметрами являются, напряжение импульсов тока, коммутируемых на индуктора, а также моменты включения и отключения индукторов, выраженные углами траектории профильных нарезок. Момент включения каждого из индукторов обозначен углом включения, который регулируется в диапазоне хода ЧПМ, равного 180o периода траектории профильных нарезок от амплитудных до амплитудных точек. Момент отключения каждого из индукторов, осуществляемый до прихода ЧПМ в амплитудные точки, обозначен углом опережения отключения, момент отключения каждого из индукторов, осуществляемый при ходе ЧПМ из амплитудных точек, обозначен углом задержки отключения. Физический смысл регулирования угла задержки аналогичен физическому смыслу регулирования оптимального угла опережения впрыскивания в кривошипно-шатунных двигателях внутреннего сгорания. Противодействие магнитного поля каждого из индукторов движению ЧПМ из амплитудных точек, в период времени, определяемый углом задержки, позволяет регулировать (ускорить) процесс полного сгорания топлива (химической реакции) в ограниченном объеме камеры сгорания каждого цилиндра и получить в процессе расширения газов, оптимальное давление с минимальными тепловыми потерями.
Рабочий цикл ИДК в режиме ИТД, чередуемый с рабочим циклом в режиме пневмопривода обеспечивает получение оптимальных параметров теплового режима ИДК, повышает КПД и качество очистки рабочего объема цилиндров.
Универсальность, высокая экономическая эффективность при изготовлении и в эксплуатации, определяют широкое применение ИДК в хозяйственной деятельности.
Работа инерционного электродвигателя осуществляется следующим образом.
Под действием пружин 15 и 16, позиционирующих челнок 12 в исходном положении инерционного электродвигателя, сателлиты 43 и 44 расположены по линиям окружностей симметрии профильных нарезок 61 и 62. При этом позицию сателлитов в профильных нарезках в окружном направлении определяют два возможных варианта:
- в точках, условно определяющих середину (180o) периодов профильных нарезок.
- в точках, условно определяющих (360o) одних и начало (0o) последующих периодов.
Позиция сателлитов 43 и 44 в исходном положении, а также направление поступательного перемещения челнока 12 при запуске инерционного электродвигателя, определяют направление вращения инерционного электродвигателя.
Импульс тока по цепи: - источник тока через коммутационную аппаратуру, щетку (на фиг. не показаны) и токосъемное кольцо 51 возбуждает в индукторе 3 магнитное поле, под действием которого челнок 12 приобретает поступательное осевое перемещение, а также вращательное движение относительно ротора 7 согласно траектории профильных нарезок 61, 62. При этом взаимодействие сателлитов 43 и 44 с боковыми поверхностями 63 профильных нарезок 61, 62 в точках их сопряжения, образует вращающие моменты ротору 7 (Мвр.р.) и челноку 12 (Мвр.ч.). Согласно закона равенства действия и противодействия Мвр.р. = Мвр.ч.
Обладающие упругостью силовые линии магнитного поля при вращательном перемещении челнока 12 относительно ротора 7, образуют в смешивающихся зубцовых выступов венца 49 челнока 12 относительно зубцовых выступов обоймы 45 индуктора 3, электромагнитный момент (Мэл), противодействующий моменту вращения челнока 12 относительно зубцовых выступов обоймы 45 индуктора 3, электромагнитный момент (Мэл), противодействующий моменту вращения челнока 12 относительно ротора 7 и действующий согласно с моментом вращения ротора 7, т.е. Мвр.р. + Мэл = Мвр.ч. - Мэл..
Реакцией для вращающего момента инерционного электродвигателя являются: - момент инерции челнока, кинетический момент вращательного движения, сообщаемого челноку ротором, а также электромагнитный магнитный момент, образуемый в смещающих зубцовых выступах венца челнока относительно зубцовых выступов обоймы индуктора и момент сопротивления движению челнока относительно ротора.
В момент прохождения сателлитами 43 и 44 амплитудных переходов 65 профильных нарезок 61, 62 размыкается цепь индуктора 3 и замыкается цепь индуктора 4. Челнок 12 под действием энергии сжатой пружины 16, а также энергии магнитного поля индуктора 4, приобретает поступательное и вращательное перемещение относительно ротора 7, а также вращательное движение совместно с ротором 7. При этом осуществляется приращение энергии вращательного движения инерционного электродвигателя, пропорциональное импульсу тока. Моменты включения и отключения индукторов инерционного электродвигателя являются регулируемыми параметрами, регулирование которых осуществляется в функции сигналов, пропорциональных индуктивному сопротивлению каждого из индукторов, зависящему от положения челнока относительно каждого из индукторов, и(или) в зависимости от дискретных сигналов, получаемых от датчиков, установленных на фланцах и взаимодействующих с торцами челнока в момент прохождения им амплитудных переходов.
Использование инерционного электродвигателя в хозяйственной деятельности позволяет повысить КПД, экономичность изготовления и надежность эксплуатации.
Работа инерционного преобразователя и накопление кинетической энергии осуществляется следующим образом.
Исходное положение и направление поступательного движения челнока 12 относительно ротора 7, в начале рабочего цикла, определяют направление вращение инерционного преобразователя.
За начало первого такта принимается крайнее левое положение челнока 12 относительно ротора 7.
Под действием импульса силы  (t2-t1), где
(t2-t1), где - вектор силы;
- вектор силы;
t2 -t1 - время действия силы (1-й такт);
от привода возвратно-поступательного движения через толкатель 53 и упорный подшипник 55 челнок 12 приобретает поступательное движение по направлению осевой линии. При этом взаимодействие сателлитов 43 и 44 с боковыми поверхностями 64, профильных нарезок 61, 62 в точках их сопряжения, образуют момент сил, сообщающий ротору 7 угловое ускорение согласно основному закону динамики:  и угловую скорость
и угловую скорость 
где  - момент сил, действующий на ротор;
- момент сил, действующий на ротор;
Fс - силы в точках сопряжения;
r - кратчайшее расстояние от осевой линии до точки сопряжения;
Jр - приведенный момент инерции ротора; - угловое ускорение ротора;
- угловое ускорение ротора; - угловая скорость ротора в момент времени.
- угловая скорость ротора в момент времени.
В соответствии с законом равенства действия и противодействия на челнок 12 в точках сопряжения действует равный по величине и противоположный по направлению момент сил, сообщающий челноку 12 угловое ускорение и угловую скорость относительно ротора 7:
где  - момент сил, действующий на челнок;
- момент сил, действующий на челнок;
Jч - приведенный момент инерции челнока; - угловое ускорение челнока;
- угловое ускорение челнока; - относительная угловая скорость челнока.
- относительная угловая скорость челнока.
Вращательные движения взаимодействующих челнока 12 и ротора 7, осуществляются во взаимно параллельных плоскостях относительно общей осевой линии вращения, следовательно абсолютная угловая скорость челнока 12 в момент времени t2 определится соотношением:
ωч.a = ωч.п-ωч.o,
где ωч.a - абсолютная угловая скорость челнока;
ωч.п - переносная угловая скорость челнока;
ωч.o - относительная угловая скорость челнока.
С учетом того, что переносная угловая скорость челнока 12 соответствует угловой скорости ротора 7, т.е. ωч.п = ωp, угловая скорость инерционного преобразователя ωпр определяется соотношением: ωп.р = ωp+ωч.a = ωp+ωp-ωч.o или ωпр = 2ωp-ωч.o
Таким образом угловая скорость инерционного преобразователя в период действия силы поступательного движения равна разности удвоенной угловой скорости ротора и относительной угловой скорости челнока.
В момент времени t2 челнок 12 расположен в крайнем правом положении относительно ротора 7.
Под действием возвратного импульса силы  •(t3-t2), где
•(t3-t2), где  - вектор силы;
- вектор силы;
t3 -t2 - время действия силы (2-й такт),
от привода возвратно-поступательного движения через толкатель 54 и упорный подшипник 56 челнок 12 приобретает поступательное движение в обратном осевом направлении. Взаимодействие сателлитов 43 и 44 с боковыми поверхностями 63, профильных нарезок 61, 62 в точках сопряжения, образует момент сил, сохраняющий направление действия момента сил предыдущего такта и сообщающий инерционному преобразователю приращение углового ускорения, угловой скорости, кинетического момента и энергии вращательного движения. Третий и четвертый импульсы силы (такты) вызовут соответствующий предшествующим, приращения энергии вращательного движения инерционного преобразователя согласно закону сохранения энергии. По окончании четвертого такта челнок 12 займет исходное относительно ротора 7 положение, начала рабочего цикла преобразователя. Вращательные движения промежуточных барабанов 68, размещенных между ротором 7 и челноком 12 (фиг. 12) можно фиксировать (тормозить), либо относительно ротора, либо относительно челнока посредством стопоров (на фиг. не показаны) чем достигается уменьшение (увеличение) моментов инерции челнока (ротора) и соответственно, регулирование зависимости кинетического момента на выходе от момента силы на входе инерционного преобразователи.
Аналогичным образом производят процесс обратного преобразования движений, когда ротор связан с приводом вращательного движения.
Использование инерционного преобразователя позволяет получить простые, надежные, технологичные, эффективные механизмы с неограниченным диапазоном механических характеристик и высоким КПД, применение которых обусловит разработку и производство принципиально нового класса машин, в частности тепловых и электротепловых двигателей для транспорта, электро-, пневмо- и гидроприводов, преобразователей природных источников энергии и механизмов, работающих на мускульной силе человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2604908C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ШТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВАЛА И ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2299341C2 |
| МОТОР-РЕКУПЕРАТОР | 1992 |
|
RU2046976C1 |
| МИКРОАВТОБУС (ВАРИАНТЫ) | 2006 |
|
RU2349485C2 |
| Поршневой насос | 2017 |
|
RU2643881C1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2008 |
|
RU2387567C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2162527C1 |
| ГРАВИТАЦИОННЫЙ ИСТОЧНИК ЭНЕРГИИ | 1994 |
|
RU2076242C1 |

Изобретение относится к области машиностроения и может быть использовано в качестве многофункционального привода, электропривода и преобразователя возвратно-поступательного движения во вращательное и наоборот в промышленности, на транспорте и других отраслях техники. Задача изобретения заключается в повышении КПД, экономичности изготовления и увеличении сроков службы привода. Инерционный двигатель комбинированный содержит инерционный электродвигатель, на фланцах которого оппозитно закреплены цилиндры с размещенными в них поршнями, жестко связанными с челноком инерционного электродвигателя посредством втулок, а стержень каждого из подпружиненных клапанов пропущен через поршень и размещен во втулке с возможностью взаимодействия с поршнем своим торцевым выступом. Инерционный электродвигатель содержит установленный в опорах вращения инерционный преобразователь, на фланцах которого оппозитно закреплены зубчатые обоймы индукторов, связанных с источником тока посредством коммутационной аппаратуры и токосъемных устройств, токосъемные кольца которых установлены на роторе инерционного преобразователя. Инерционный преобразователь возвратно-поступательного движения во вращательное и наоборот содержит расположенные концентрично барабаны, один из которых, являясь ротором, установлен с возможностью вращения без осевого перемещения в опорах вращения и связан с другим барабаном, являющимся челноком, посредством саталлитов. Челночок установлен с возможностью вращательного и возвратно-поступательного движений относительно ротора и вращательного переносного движения относительно опор вращения. 3 с. и 6 з.п. ф-лы, 20 ил.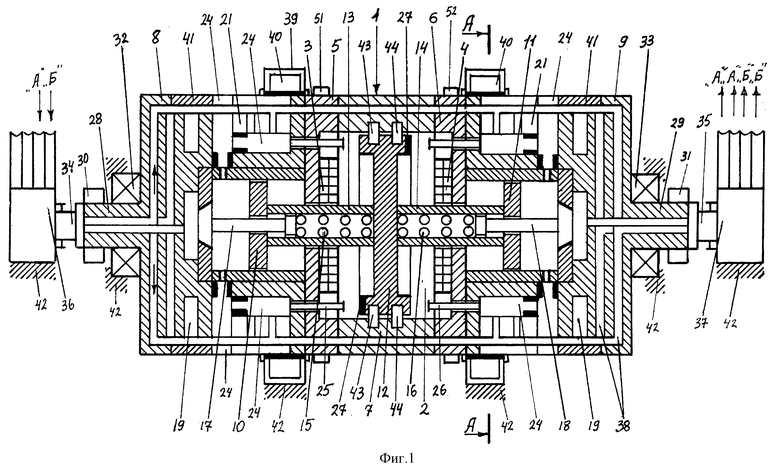
| Блок для электроснабжения управляющей электроники вентильных преобразователей тока с принудительной коммутацией | 1980 |
|
SU1302393A1 |
| Устройство для рекуперации энергии колебаний транспортного средства | 1986 |
|
SU1449699A1 |
| Преобразователь вращательного движения в возвратно-поступательное конструкции Спирякова Г.Н. | 1987 |
|
SU1528979A1 |
| Свободнопоршневой двухтактный двигатель-электрогенератор | 1990 |
|
SU1800079A1 |
| ШЕСТИСТУПЕНЧАТАЯ НЕСООСНАЯ КОРОБКА ПЕРЕДАЧ СО СДВОЕННЫМ СЦЕПЛЕНИЕМ | 2013 |
|
RU2542810C1 |
| GB 1392827 А, 30.04.1975. | |||

