Изобретение относится к машиностроению, а именно к оборудованию и средствам механизации погрузочно-разгрузочных и транспортных работ, и может быть использовано на складах горючесмазочных и лакокрасочных материалов во многих отраслях народного хозяйства.
Цель изобретения - расширение технологических возможностей за счет обеспечения перевозки цилиндрических бочек и бидонов.
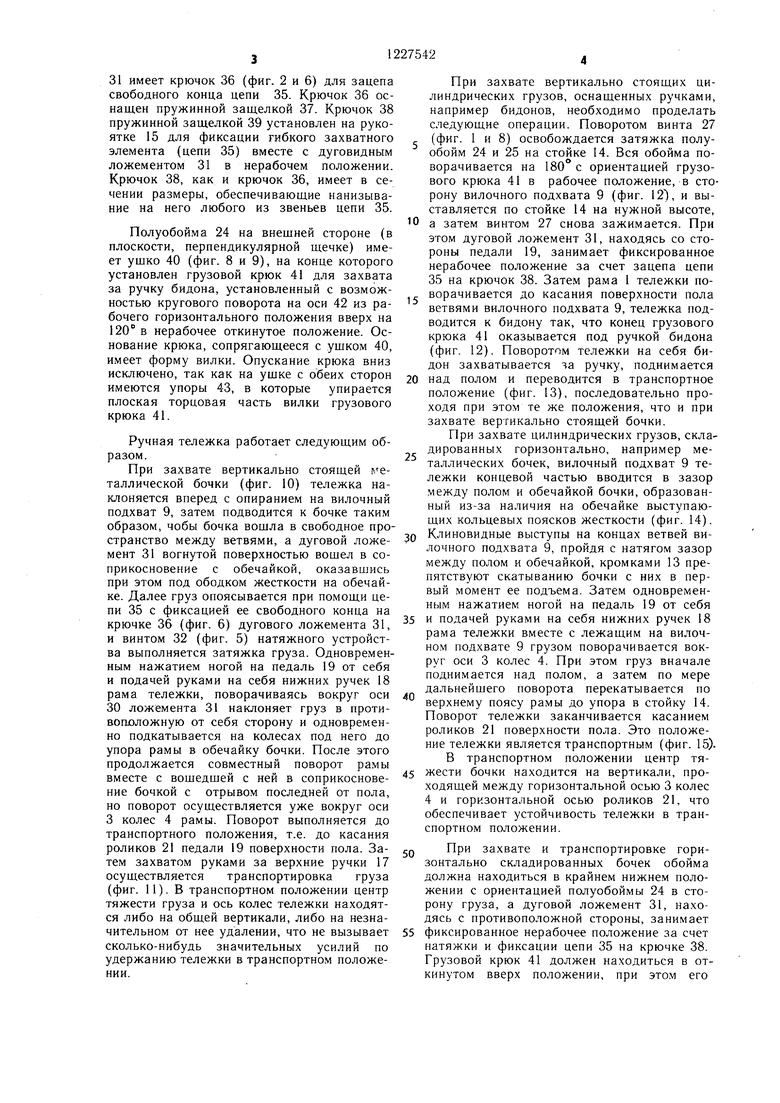
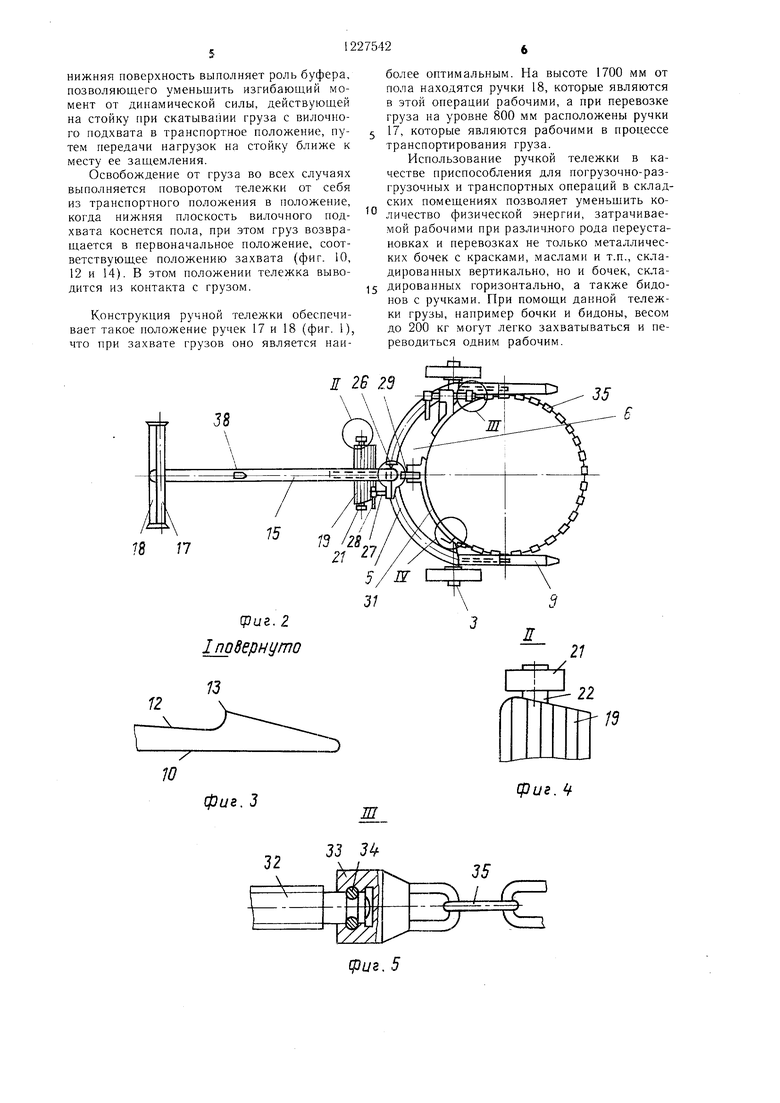
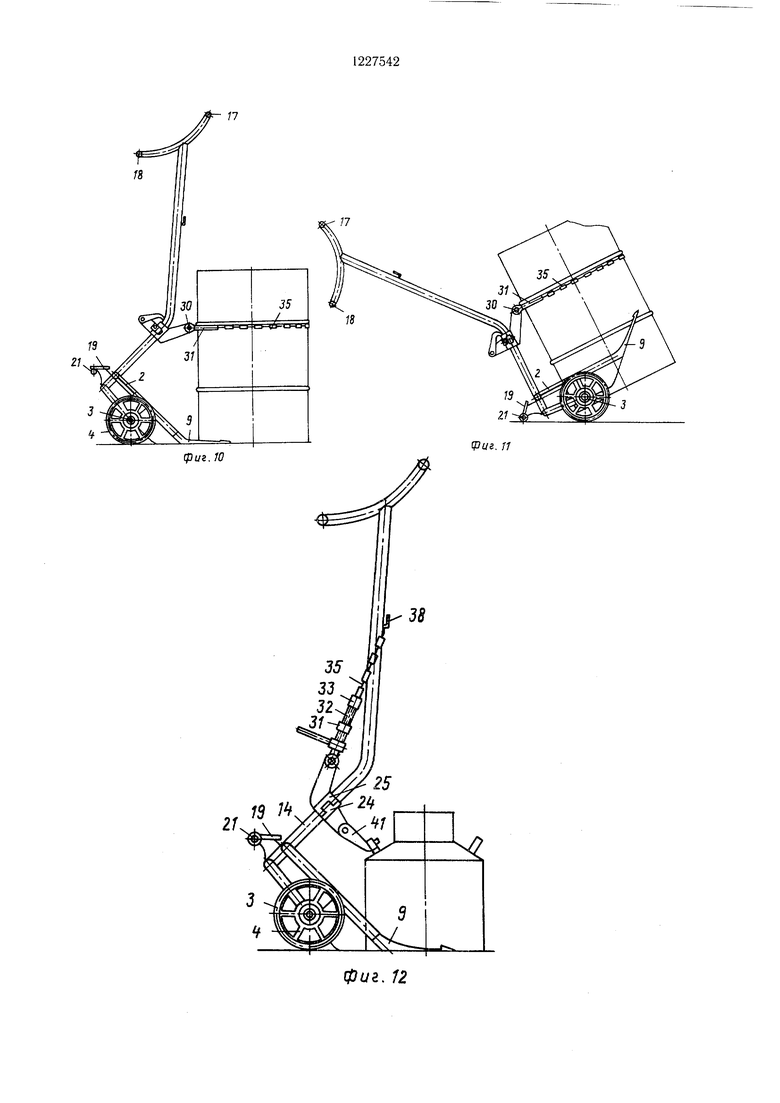
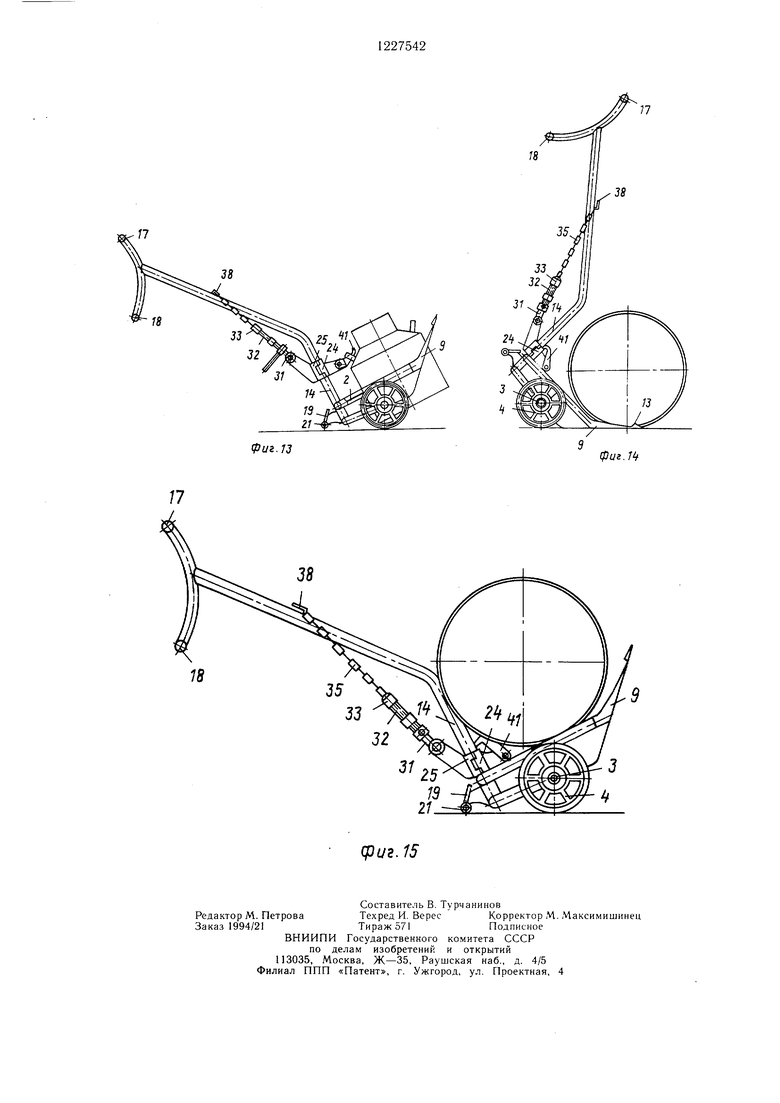
На -фиг. 1 изображена ручная тележка, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - узел И на фиг. 2; на фиг. 5 - узел III на фиг. 2; на фиг. 6 - узел IV на фиг. 2; на фиг. 7 - узел Уна фиг. 1; на фиг. 8 - сечение А-А на фиг. 1; на фиг. 9 - вид Б на фиг. 8; на фиг. 10 - ручная тележка в положении захвата цилиндрической бочки; на фиг. 11 - то же, в положении транспортирования цилиндрической бочки; на фиг. 12 то же, в положении захвата бидона; на фиг. 13 - то же, при транспортировке бидона; на фиг. 14 - то же, в положении захвата лежащей бочки; на фиг. 15 - то же при транспортировке лежащей бочки.
Ручная тележка содержит открытую с фронтальной стороны двухколесную О-об- разную раму 1, представляющую собой трубчатый каркас, состоящий из нижнего пояса в виде дуги, имеющей на вогнутой части горизонтальное ребро 2 жесткости и по обоим концам оси 3 для колес 4, и дополнительную раму 5 из верхнего U-образного пояса, также имеющего горизонтальное ребро 6 жесткости и связанного с нижним поясом двумя боковыми стойками 7, которые не выступают над верхней поверхностью пояса и подкреплены вертикальными кницами 8, жестко связанными с параллельными и кон- сольно выступающими вперед (за колеса) частями U-образного пояса.
Ребра 2 и б жесткости выполнены в форме ложементов, на которые в транспортном положении опирается цилиндрическая поверхность вертикально захватываемой бочки или бидона. Со стороны открытой фронтальной части дополнительная рама 5 имеет вилочный подхват 9 из двух ветвей прямо- .угольного сечения, каждая из которых жестко связана с параллельными консольными частями U-образного трубчатого пояса. Вилочный подхват 9, являясь продолжением консольных параллельных сторон, образует с ними нижней поверхностью 10 тупой угол в 135°, при этом плоская нижняя поверхность расположена по касательной к поверхности прорезиненного обода 11 колеса 4 и служит в качестве опоры для обеспечения устойчивого фиксированного положения тележки при захвате груза.
Верхняя поверхность 12 вилочного подхвата 9 имеет криволинейную форму, сопряженную у основан,.: с верхней поверхностью U-образного пояса и обеспечивающую постепенное утолщение сечения ветви к окончанию. Концы вилочного подхвата 9 имеют форму клина (фиг. 3), при этом верхняя кромка 13 тыльной части клина расположена выше прилегающей к тыльной части клина верхней поверхности и выполнена с выступами для ограничения перемещения груза на вилочном подхвате. Со стороны дугообразной тыльной части по оси симметрии установлена стойка 14 (фиг. 1), которая в нижней части объединяет жесткой связью нижний пояс рамы 1 и верхний пояс дополнительной рамы 5, а в верхней жестко связа на с рукояткой 15, которая образует со стойкой 14 тупой угол. На конце рукоятки 15 имеется дополнительная рукоятка 16.
Дополнительная рукоятка 16 состоит из дугообразной перекладины и имеет жестко связанные с ней верхнюю 17 и нижнюю 18
горизонтальные ручки.
В нижней части стойки 4 выпо, упор в виде педали 19 на ребре 20, оснащенной двумя боковыми роликами 21, установленными на полуосях 22 (фиг. 4) с возможностью качения по полу после поворота рамы тележки в положение транспортирования груза.
Полуоси 22 жестко связаны с педалью 19. На стойке 14 (фиг. 1) установлена обойма
23 с Е50зможностью кругового поворота вокруг стойки и перемещения по ее высоте с фиксацией в требуемом положении. Обойма состоит из двух полуобойм 24 и 25, имею- идих общую ось 26. На внутренней, контактирующей со стойкой 14, полуцилиндрической поверхности каждой полуобоймы имеется насечка для улучшения сцепления со стой кой при обжатии полуобойм вокруг нее. Каждая полуобойма имеет щечку по плоскости разъема обоймы. На щечке полуобоймы 24
имеется сквозное гладкое отверстие, а на щечке полуобоймы 25 - соосное ему резьбовое отверстие для взаимодействия со стяжным винтом 27, который оснащен рукояткой 28. Полуобойма 25 имеет плоский кронштейн 29 (фиг. 1 и 9). жестко связанный с полуобоймой и ориентированный вертикально и перпендикулярно плоскости разъема обоймы. Верхний конец кронп:тейна имеет радиусное закругление и отверстие для оси 30, которая и:арнирно крепит на кронштейне дуговидный ложемент 31, имеющий с одного конца дуги натяжное устройство в виде винта 32 с шарниром 33 (фиг. 2 и 5), закрепленным на конце винта при помощи штифтов 34, взаимо- действуюидих с круговой канавкой на конце
винта. Шарнир 33, установленный с возможностью вращения на винте 32, жестко связан с гибкой связью, например цепью 35. На другом конце дуги дуговидный ложемент
31 имеет крючок 36 (фиг. 2 и 6) для зацепа свободного конца цепи 35. Крючок 36 оснащен пружинной защелкой 37. Крючок 38 пружинной защелкой 39 установлен на рукоятке 15 для фиксации гибкого захватного элемента (цепи 35) вместе с дуговидным ложементом 31 в нерабочем положении. Крючок 38, как и крючок 36, имеет в сечении размеры, обеспечивающие нанизывание на него любого из звеньев цепи 35.
Полуобойма 24 на внешней стороне (в плоскости, перпендикулярной щечке) имеет ушко 40 (фиг. 8 и 9), на конце которого установлен грузовой крюк 41 для захвата за ручку бидона, установленный с возможностью кругового поворота на оси 42 из рабочего горизонтального положения вверх на 120° в нерабочее откинутое положение. Основание крюка, сопрягающееся с ушком 40, имеет форму вилки. Опускание крюка вниз исключено, так как на ушке с обеих сторон имеются упоры 43, в которые упирается плоская торцовая часть вилки грузового крюка 41.
Ручная тележка работает следующим образом.
При захвате вертикально стоящей металлической бочки (фиг. 10) тележка наклоняется вперед с опиранием на вилочный подхват 9, затем подводится к бочке таким образом, чобы бочка вощла в свободное пространство между ветвями, а дуговой ложемент 31 вогнутой поверхностью вошел в соприкосновение с обечайкой, оказавшись при этом под ободком жесткости на обечайке. Далее груз опоясывается при помощи цепи 35 с фиксацией ее свободного конца на крючке 36 (фиг. 6) дугового ложемента 31, и винтом 32 (фиг. 5) натяжного устройства выполняется затяжка груза. Одновременным нажатием ногой на педаль 19 от себя и подачей руками на себя нижних ручек 18 рама тележки, поворачиваясь вокруг оси 30 ложемента 31 наклоняет груз в проти- вогюложную от себя сторону и одновременно подкатывается на колесах под него до упора рамы в обечайку бочки. После этого продолжается совместный поворот рамы вместе с вошедшей с ней в соприкосновение бочкой с отрывом последней от пола, но поворот осуществляется уже вокруг оси 3 колес 4 рамы. Поворот выполняется до транспортного положения, т.е. до касания роликов 21 педали 19 поверхности пола. Затем захватом руками за верхние ручки 17 осуществляется транспортировка груза (фиг. 11). В транспортном положении центр тяжести груза и ось колес тележки находятся либо на общей вертикали, либо на незначительном от нее удалении, что не вызывает сколько-нибудь значительных усилий по удержанию тележки в транспортном положении.
При захвате вертикально стоящих цилиндрических грузов, оснащенных ручками, например бидонов, необходимо проделать следующие операции. Поворотом винта 27 (фиг. 1 и 8) освобождается затяжка полуобойм 24 и 25 на стойке 14. Вся обойма поворачивается на 180° с ориентацией грузового крюка 41 в рабочее положение, в сторону вилочного подхвата 9 (фиг. 12), и выставляется по стойке 14 на нужной высоте,
0 а затем винтом 27 снова зажимается. При этом дуговой ложемент 31, находясь со стороны педали 19, занимает фиксированное нерабочее положение за счет зацепа цепи 35 на крючок 38. Затем рама 1 тележки поворачивается до касания поверхности пола ветвями вилочного подхвата 9, тележка подводится к бидону так, что конец грузового крюка 41 оказывается под ручкой бидона (фиг. 12). Поворотом тележки на себя бидон захватывается за ручку, поднимается
0 над полом и переводится в транспортное положение (фиг. 13), последовательно проходя при этом те же положения, что и при захвате вертикально стоящей бочки.
При захвате цилиндрических грузов, складированных горизонтально, например металлических бочек, вилочный подхват 9 тележки концевой частью вводится в зазор между полом и обечайкой бочки, образованный из-за наличия на обечайке выступающих кольцевых поясков жесткости (фиг. 14).
0 Клиновидные выступы на концах ветвей вилочного подхвата 9, пройдя с натягом зазор между полом и обечайкой, кромками 13 препятствуют скатыванию бочки с них в первый момент ее подъема. Затем одновременным нажатием ногой на педаль 19 от себя
5 и подачей руками на себя нижних ручек 18 рама тележки вместе с лежащим на вилочном подхвате 9 грузом поворачивается вокруг оси 3 колес 4. При этом груз вначале поднимается над полом, а затем по мере дальнейшего поворота перекатывается по верхнему поясу рамы до упора в стойку 14. Поворот тележки заканчивается касанием роликов 21 поверхности пола. Это положение тележки является транспортным (фиг. 15). В транспортном положении центр тя5 жести бочки находится на вертикали, проходящей между горизонтальной осью 3 колес 4 и горизонтальной осью роликов 21, что обеспечивает устойчивость тележки в транспортном положении.
При захвате и транспортировке горизонтально складированных бочек обойма должна находиться в крайнем нижнем положении с ориентацией полуобойм ьг 24 в сторону груза, а дуговой ложемент 31, находясь с противоположной стороны, занимает
5 фиксированное нерабочее положение за счет натяжки и фиксации цепи 35 на крючке 38. Грузовой крюк 41 должен находиться в откинутом вверх положении, при этом его
нижняя поверхность выполняет роль буфера, позволяющего уменьшить изгибающий момент от динамической силы, действующей на стойку при скатывании груза с вилочного подхвата в транспортное положение, путем передачи нагрузок на стойку ближе к месту ее защемления.
Освобождение от груза во всех случаях выполняется поворотом тележки от себя из транспортного положения в положение, когда нижняя плоскость вилочного подхвата коснется пола, при этом груз возвращается в первоначальное положение, соответствующее положению захвата (фиг. 10, 12 и 14). В этом положении тележка выводится из контакта с грузом.
Конструкция ручной тележки обеспечивает такое положение ручек 17 и 18 (фиг. 1), что при захвате грузов оно является наиболее оптимальным. На высоте 1700 мм от пола находятся ручки 18, которые являются в этой операции рабочими, а при перевозке груза на уровне 800 мм расположены ручки
17, которые являются рабочими в процессе транспортирования груза.
Использование ручкой тележки в качестве приспособления для погрузочно-раз- грузочных и транспортных операций в складских помещениях позволяет уменьшить количество физической энергии, затрачиваемой рабочими при различного рода переустановках и перевозках не только металлических бочек с красками, маслами и т.п., ск.та- дированных вертикально, но и бочек, складированных горизонтально, а также бидонов с ручками. При помощи данной тележки грузы, например бочки и бидоны, весом до 200 кг могут легко захватываться и переводиться одним рабочим.
Рае. 2
I подери (Jто
/
10
фиг. 3
Сриг.
Ш
33 3
Vm
cpus. 5
36
зе
38
15
cpuz.S
фиг. 7
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК И СЛИВА ИЗ НИХ ЖИДКОСТЕЙ | 2008 |
|
RU2375228C1 |
| Ручная тележка для перемещения бочек и слива из них жидкостей | 1990 |
|
SU1724506A1 |
| РУЧНАЯ ТЕЛЕЖКА ДЛЯ ПЕРЕМЕЩЕНИЯ БОЧЕК | 1998 |
|
RU2143361C1 |
| Ручная тележка для перевозки и кантования бочки | 1987 |
|
SU1449441A2 |
| КАНТОВАТЕЛЬ ДЛЯ БОЧЕК С ОБРУЧАМИ КАТАНИЯ | 2000 |
|
RU2177443C1 |
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ БОЧЕК | 1999 |
|
RU2167076C2 |
| Устройство для транспортировки и опрокидывания бочек | 1988 |
|
SU1585229A1 |
| ТЕЛЕЖКА-ЗАХВАТ ДЛЯ КАНТОВАНИЯ, ПЕРЕВОЗКИ И РАЗЛИВА ЖИДКОСТИ ИЗ ГОРИЗОНТАЛЬНОЙ БОЧКИ | 1989 |
|
RU2015050C1 |
| Ручная тележка для перевозки, кантования и разлива жидкости из бочки | 1991 |
|
SU1782217A3 |
| КРАНОВЫЙ ЗАХВАТ | 1966 |
|
SU187976A1 |

фиг.
Вид 5 подернуто
4-3
/7
qOi/a. П
Фиг .13
77
Г8
фиг.
18
Составитель В. Турчанинов
Редактор М. ПетроваТехред И. ВересКорректор М. Максимишннец
Заказ 1994/21Тираж 571Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
(риг. 15
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ОГУРЦОВ НА КРУГЛЫХ ГРЯДКАХ | 2008 |
|
RU2366160C1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
