Изобретение относится к автоматике и предназначено для успользова- кия в системах многократного позиционирования и исполнительного органа, например, сварочной или сверлильной головки.
Целью изобретения является распш- рение области применения устройства за счет возможности управления перемещением при шахматном расположении позиций останова исполнительного органа.
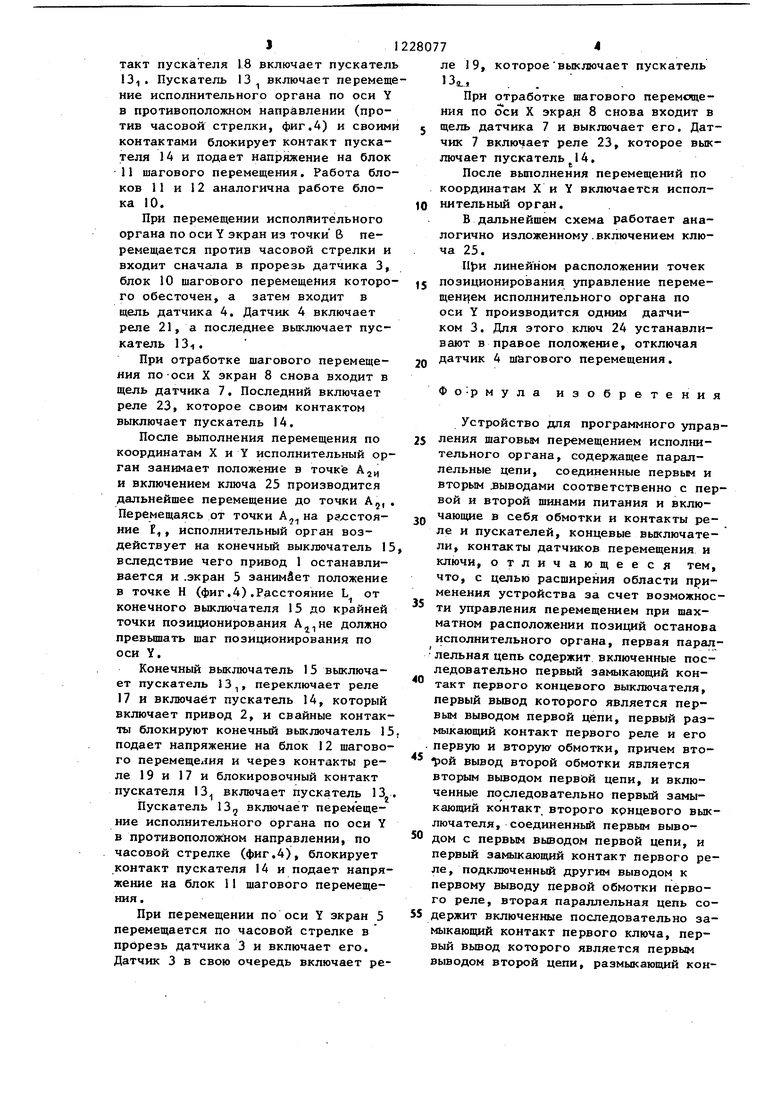
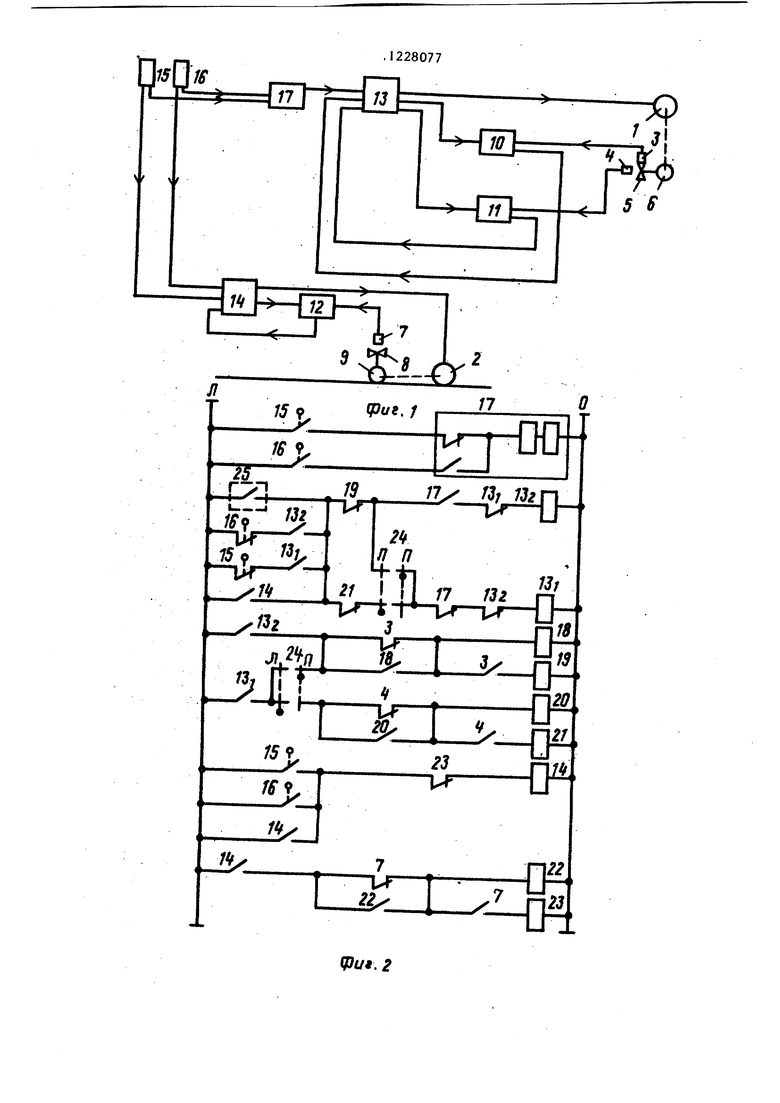
На фиг,) показана блок-схема устройства; на фиг. 2 - его принципиальная схема; на Фнг, 3 - схематическое расположение точек останова (позиционирования) исполнительного органа; на фиг. 4 - конструктивная схема датчиков перемещения.
Устройство содержит приводы 1 и 2 перемещения исполнительного органа по осям соответственной и X, датчики перемещения 3 и 4 с общим вращающимся экраном 5 и соответствующими выходами реле, механическую передачу 6, кинематически связьшающую привод 1 с экраном 5, датчик перемещения 7 с экраном 8, механическую передачу 9, кинематически связывающую привод 2 с экраном 8, релейные блоки шагового перемещения JO-12, блок , 13 первого 13, и второго 13 пускателей, третий пускатель 14, первый 15 и второй 16 конечные выключатели, реле 17-23, причем первое реле 17 является двухпозиционньм запоминающим, а реле 18 и 19, 20 и 21, 22 и 23 попарно образуют блоки шагового перемещения соответственно 10, 11 и 12, 24 и 25 - ключи.
Коэффициенты редукции механических передач 6 и 9 выбираются из расчета соответствия позиционирования на один шаг двум последовательным положениям экранов 5 и 8 в щелях датчиков 3,4,7.
Точки позии(ионирования могут располагаться как линейно, так и в шахматном порядке. Выбор режима позиционирования осуществляется вторым ключом 24. Левое положение ключа 24 соответствует работе устройства при шахматном порядке расположения точек позиционирования, правое - линейном. При шахматном расположении точки позиционирования (фиг.З) расположены с шагом а по оси Y и шагом m по оси X. Расстояние меркду двумя рядами точек позиционирования
по оси равно а или а . Для случая а это расстояние равно а/2.
Устройство работает следующим образом ,
Исполнительный орган устанавливается на начальной точке позиционирования (точке А на фиг.З). Экраны 5 и В расположены в щели датчиков 3 и 7 шаговых перемещений. С помощью кнопки (на чертеже не показана) включается реле 17. После вьтолнения необходимой операции в точке А замыкается первый ключ 25, который через контакты реле 19 и 17, блокировоч5 ный контакт пускателя 13 включает пускатель 13i. Пускатель 13 включает привод 1 и своим контактом вклю- чается на блокировку ключа 25, подавая питание на блок 10 шагового пере0 мещения.
При перемещении исполнительного органа экран 5 выходит из щели датчика 3 шагового перемещения (на фиг.4 движе ние. экрана 5 происходит по часо5 вой стрелке). При этом датчик 3 выключается и включается реле 18, не блокируя контакт датчика 3.
При перемещении исполнительного органа на расстояние, равное шагу по(j зиционирования, т.е. расстоянию между двумя рядом расположенными точками, экран 5 снова входит в щель датчика 3. При этом включается реле 3, включающее реле 19, а оно в свою очередь выключает пускатель 13, в результате чего привод 1 останавливается, а исполнительный орган включается в работу. После выполнения задан- ных операций замыканием ключа 25 включается привод 1. В остальных точках позиционирования устройство работает аналогичным образом.
Исполнительный орган, перемещаясь от точки А на расстояние Е, воздействует на конечный выключатель 16
(фиг.З), вследствие чего привод 1 останавливается и экран 5 занимает положение в точке В (фиг.4). Расстояние LjOT конечного выключателя 16 до крайней точки позиционирования А
0 не должно превышать шаг позиционирования на оси У. Конечный выключатель 16 .выключает пycкateли 13 и 14, переключает реле 17 и включает пускатель 14, который включает привод 2
5 и своими контактами блокирует конечный выключатель 16, подав напряжение на 6jioK 12 шагового перемещения, и через контакты реле 21 и 17 и кон0
такт пускателя 18 включает пускатель 13, . Пускатель 13 включает перемещение исполнительного органа по оси Y в противоположном направлении (против часовой стрелки, фиг,А) и своими контактами блокирует контакт пускателя 14 и подает напряжение на блок 11 шагового перемещения. Работа блоков 11 и 12 аналогична работе блока 10.
При перемещении исполнительного органа по оси Y экран из точки В перемещается против часовой стрелки и входит сначала в прорезь датчика 3, блок 10 шагового перемещения которого обесточен, а затем входит в щель датчика 4. Датчик 4 включает реле 21f а последнее выключает пускатель 13i.
При отработке щагового перемещения по оси X экран 8 снова входит в щель датчика 7. Последний включает реле 23, которое своим контактом выключает пускатель 14.
После выполнения перемещения по координатам X и Y исполнительный орган занимает положение в точке А
И включением ключа 25 производится дальнейшее перемещение до точки А5, . Перемещаясь от точки А,, на расстояние Е, исполнительный орган воздействует на конечный выключатель 15 вследствие чего привод 1 останавливается и .экран 5 занимает положение в точке Н (фиг.4).Расстояние L от конечного выключателя 15 до крайней точки позиционирования А,не должно превышать шаг позиционирования по оси Y.
Конечный вьпслючатель 15 выключает пускатель 13,, переключает реле 17 и включает пускатель 14, который включает привод 2, и свайные контакты блокируют конечный выключатель 15 подает напряжение на блок I2 щагового перемещения и через контакты реле 1 9 и 1 7 и блокировочный контакт пускателя 13 включает пускатель 13
Пускатель 132 включает перемещение исполнительного органа по оси Y в противоположном направлении, по часовой стрелке (фиг.4), блокирует контакт пускателя 14 и подает напряжение на блок 11 щагового перемещения.
При перемещении по оси Y экран 5 перемещается по часовой стрелке в прорезь датчика 3 и включает его. Датчик 3 в свою очередь включает реельещеYоимиаоклоои3, росевт
о ори
я 5, . я15, ииет ей но
аеый ак15. воет13.
еYт ряе5реле 19, которое выключает пускатель
13, . .
При отработке шагового перемстде- ния по оси X 8 снова входит в 5 щель датчика 7 и выключает его. Датчик 7 включает реле 23, которое выключает пускатель 14.
После выполнения перемещений по координатам X и Y включается испол- 0 нительный орган.
В дальнейшем схема работает аналогично изложенному.включением ключа 25.
П1эи линейном расположении точек fj позиционирования управление переме- исполнительного органа по оси Y производится одним датчиком 3. Для этого ключ 24 устанавливают в правое положение, отключая 2Q датчик 4 щагового перемещения.
Ф о-р мула изобретения
Устройство для программного управ25 ления щаговьм перемещением исполнительного органа, содержащее параллельные цепи, соединенные первым и вторым .выводами соответственно с первой и второй шинами питания и вклюJP чающие в себя обмотки и контакты реле и пускателей, концевые выключатели, контакты датчиков перемещения и ключи, отличающееся тем, что, с целью расширения области применения устройства за счет возможности управления перемещением при шахматном расположении позиций останова исполнительного органа, первая параллельная цепь содержит включенные последовательно первый замыкающий контакт первого концевого выключателя, первый вывод которого является первым выводом первой цепи, первый размыкающий контакт первого реле и его первую и вторукх обмотки, причем вто- вывод второй обмотки является вторым вьшодом первой цепи, и включенные последовательно первый замыкающий контакт второго крнцевого выключателя, соединенный первым выво50 дом с первым выводом первой цепи, и первый замьжецощий контакт первого реле, подключенный другим выводом к первому выводу первой обмотки первого реле, вторая параллельная цепь со55 держит включенные последовательно замыкающий контакт первого ключа, первый вьшод которого является первьл выводом второй цепи, размыкающий кон35
40
такт второго реле, второй замыкающий контакт первого реле, размыкающий контакт первого пускателя и обмотку второго пускателя, вторбй вывод которой является вторым вьюодом второй цепи, включенные последовательно размыкающий контакт второго концевого выключателя, соединенный первым выводом с первым выводом второй цепи, и первый замыкающий контакт второго пускателя, подключенный другим вьюодом к другому вьшоду замыкающего контакта первого ключа, включенные последовательно размыкающий контакт первого концевого -выключателя, соединенный первым выводом с первым выводом второй цепи, и первый замыкающий контакт первого пускателя, другой вывод которого подключен к другому вьтоду замыкающего контакта первого ключа, включенные последовательно первый замыкаю1ций контакт третьего пускателя, соединенный первым и вторым вьтодами соответственно с первым вьшодом второй цепи и вторым выводом замыкающего контакта первого ключа, размыкающий контакт третьего реле, первый замыкающий кон такт второго ключа, второй размыкающий контакт .первого реле., размыкающий контакт второго пускателя и обмотку первого пускателя, второй вывод которой соединен с вторым выводом второй цепи, и второй замыкающий контакт второго ключа, подключенный выводами к вторым выводам его первого замыкающего контакта и размыкающего контакта второго реле, третья параллельная цепь содержит включенные последовательно второй замыкающий контакт второго пускателя, первый вывод которого является первым выводом третьей цепи, размыкающий контакт первого датчика перемещения и обмотку четвертого реле, второй вьшод которой является вторым вьшодом третьей цепи, включенные последовательно второй замыкающий контакт первого пускателя, подключенный первым вьшодом к первому выводу третьей цепи, третий замыкающий
контакт второго ключа, размыкающий контакт второго датчика перемещения и обмотку пятого реле, соединенную 5 вторым выводом с вторым вьшодом дан-- ной цепи, включенные последовательно четвертый замыкающий контакт второго ключа, соединенный выводами с вторыми выводами вторых замыкающих кон- 0 тактов первого и второго пускателей, замыкающий контакт четвертого реле, соединенный вторым выводом с первым выводом его обмотки, замыкающий контакт первого датчика перемещения и
5 обмотку второго реле, соединенную вторым выводом с вторым выводом третьей цепи, и включенные последо- вательно замыкающий контакт пятого реле, соединенный вьшодами с вывода0 ми размыкающего контакта второго датчика перемещения, замыкающий контакт этого датчика и обмотку третьего реле, второй вывод которой соединен с вторым выводом третьей цепи,
5 четвертая параллельная цепь содержит включенные последовательно второй замыкающий контакт первого концевого выключателя, размыкающий контакт шестого реле и обмотку третье0 го пускателя, второй вывод которой является вторым вьшодом четвертой цепи, и вторые замыкающие .контакты второго концевого выключателя и третье1 о пускателя, соединенные выводами с выводами второго замыкающего контакта первого концевого выключателя, а пятая параллельная цепь содержит третий замыкающий контакт третьего пускателя, .первый вывод ксQ торого является первым вьшодом пятой цепи, размыкающий контакт третьего датчика перемещения и обмотку седьмого реле, второй вывод которой является вторым вьшодом пятой цепи, и включенные последовательно замыкающий контакт седьмого реле, соединенный вьшодами с вьшодами размыкающего контакта третьего датчика перемещения, замыкающий контакт третьего датчика
и обмотку шестого реле, подключенную вторым вьшодом к второму вьшоду пятой цепи.
.
ъ
16
Агп
1228077
Ь-f
- -I-+
+ +-1+
4-+
f
Ь-f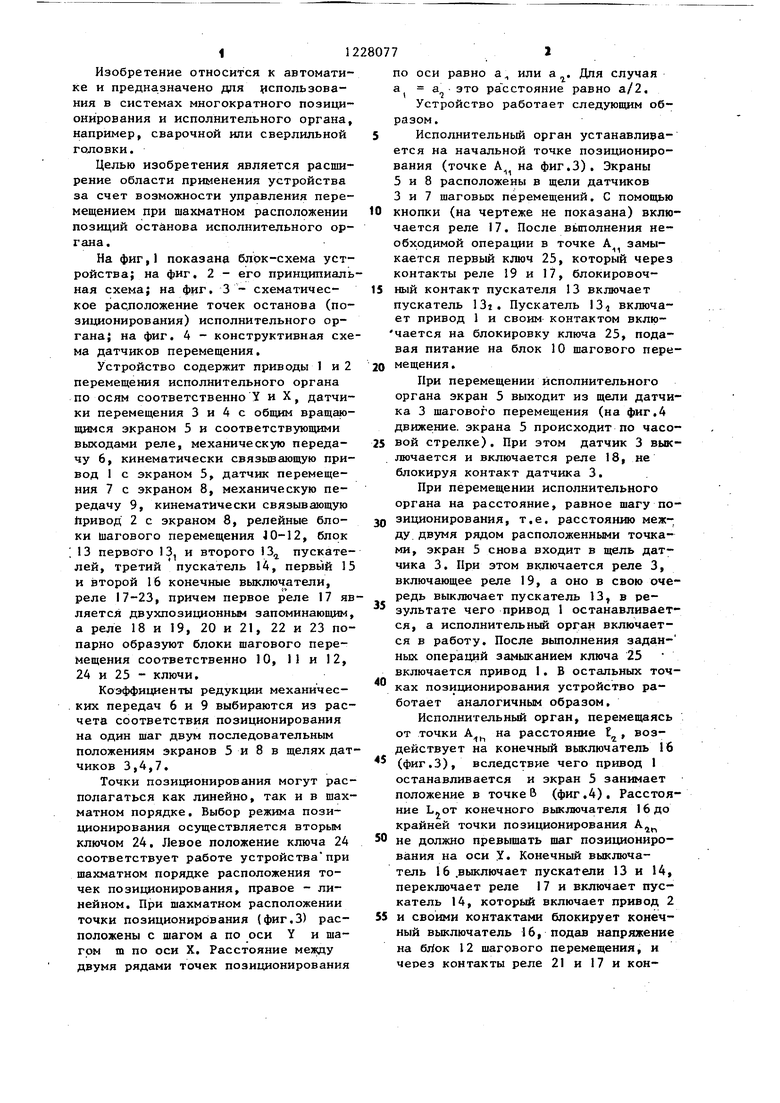
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового позиционирования объекта | 1985 |
|
SU1335930A1 |
| Устройство для управления приводом | 1986 |
|
SU1416937A1 |
| Устройство для управления реверсивным электроприводом | 1983 |
|
SU1131001A1 |
| Командоаппарат | 1981 |
|
SU1061126A1 |
| Устройство для управления реверсивным электроприводом | 1987 |
|
SU1515307A1 |
| Устройство для аварийной сигнализации, блокировки и защиты | 1986 |
|
SU1483473A1 |
| Устройство для аварийного отключения технологического агрегата | 1987 |
|
SU1462386A1 |
| Устройство для программного управления отбором проб воздушной среды в воздухоприемных устройствах силовых установок | 1984 |
|
SU1252756A1 |
| Устройство для защитного отключения трехфазной электроустановки | 1983 |
|
SU1116491A1 |
| Система автоматического управления и защиты погружного электродвигателя скважинного насоса | 1986 |
|
SU1504714A1 |
Изобретение относится к области автоматического программного управления обрабатывающим оборудованием. Устройство выполнено в виде набора Параллельных цепей, подключенных выводами к шинам питания и состоящих из реле, пускателей, ключей, концевых выклк чателей и датчиков перемещения. Программа работы устройства зафиксирована в структуре его прин- ципиальиой схемы, определенной коммутацией названных элементов в каждой из цепей набора, и реализуется-последовательным срабатыванием реле, исходными сигналами для которых являются выходные сигналы концевых выключателей и датчиков перемещения (их выходиых реле). Реле, объединенные попарно, и блоки шаговых перемещений осуществляют выключение приводов по двум координатам при достижении заданной -ПОЗИЦИИ останова и включение их при отработке следующего позиционного перемещение. 4 ил. (Л to ю 00 о 
15
фиг. 3
Редактор К.Волощук
Составитель С.Хлебников Техред И.Попович
Заказ 2286/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий И3035, Москва, Ж-35, Раушская наб. д.4/5
Производствеино-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
(pue,ff
Корректор А.Зимокосов
| Шаумян Г.А, и др | |||
| Автоматизация производственных процессов, М.: Высшая школа, 1967, с.194-195 | |||
| ТСауфман Л.М | |||
| Проектирование путевых датчиков для бескопирных систем программного управления металлорежущими станками - В сб.: Программное управление металлорежущими станками | |||
| М.: МДНТП им | |||
| Ф.Э.Дзержинского, 1958, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Цеиципер М.С | |||
| и др | |||
| Чехословацкие и немецкие токарно-копировальныё полуавтоматы с программным управлени- ем | |||
| - В сб.: Программное управление металлорежущими станками | |||
| М.: МДНТП им | |||
| Ф.Э.Дзержинского, 1958, с.32-37. | |||
