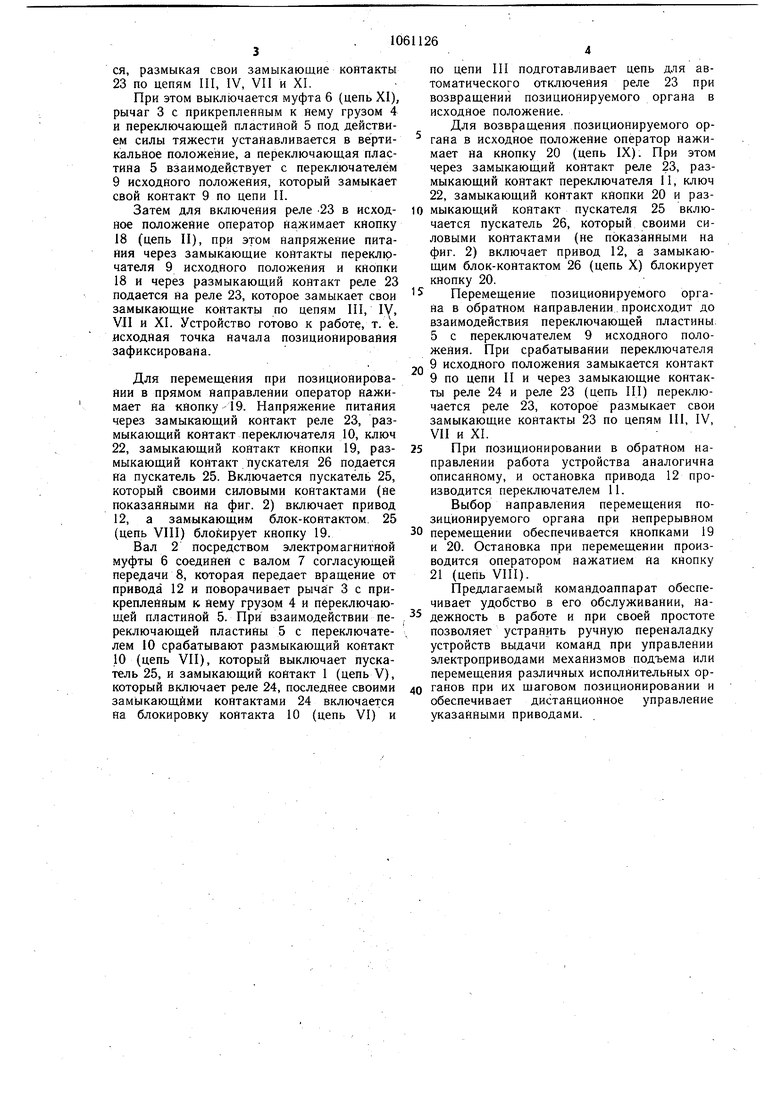
Изобретение относится к устройствам автоматизации управления приводом механизмов подъема или перемещения при позиционировании с изменяющимся исходным положением, а также при необходимости точного автоматического возврата в исходное положение при дистанционном управлении. Известна система позиционирования, управляемая при помощи выключателей, содержащая вращающийся диск, на котором закреплены упоры, воздействующие при его вращении на конечные выключатели 1. Однако указанное устройство неудобно в эксплуатации из-за того, что при изменении исходного положения позиционирования необходимо перестраивать упоры. Известно также программное устройство для автоматического перемещения валков нажимных механизмов прокатных станов, в котором изменена программная панель с контактными рядами и следящая система, связанная с валом электродвигателя через электромагнитную муфту. Контактные ряды присоединены к одному полюсу питающей сети через коммутатор счетного реле, предназначенного для поочередного ввода в действие рядов контактной панели в комбинации со следящей системой, снабженной пружиной для возвращения системы в исходные положения при расцеплении электромагнитной муфты после обработки заданного перемещения по данному контактному ряду 2. Однако это программное устройство является сложным и громоздким, что приводит к ухудщению условий эксплуатации. Кроме того, применение в программном устройстве пружин для возврата следящей системы в исходное положение ограничивает возможность выбора режима - исключается режим непрерывного шагового позиционирования. Целью изобретения является улучшение условий эксплуатации командоаппарата. Поставленная цель достигается тем, что в командоаппарате, содержащем группу переключателей, установленных в цепях управления приводом перемещения, связанным с переключающей пластиной через согласующую передачу и включенную с ней последовательно электромагнитную муфту, и цепь управления с реле включения питаНия пускателей привода перемещения и электромагнитной муфты, установлен пере- J ключатель исходного положения переключающей пластины, на валу привода перемещения которой установлен неуравновещенный относительно оси вращения пластины груз, причем контакты переключателя исходного положения установлены в цепи управления с реле включения питания пускателей привода перемещения и электромагнитной муфты. На фиг. 1 схематически изображен командоаппарат с блоками, обеспечивающими его функционирование в приводе; на фиг. 2 вариант схемы блока управления. Командоаппарат содержит корпус 1, установленный в корпусе на опорах качения вал 2 привода с рычагом 3, к которому прикреплен неуравновешенный груз 4 и переключающая пластина 5, электромагнитную муфту 6 для соединения вала 2 с валом согласующей передачи 8, переключатель 9 исходного положения переключающей пластины и переключатели 10, 11, расположенные на корпусе по окружности с центром, совпадающим с осью вала 2, и предназначенные выдавать сигналы для управления приводом 12 перемещения позиционируемого органа. Для предотвращения раскачивания рычага 3 на корпусе 1 укреплен магнит 13. Командоаппарат содержит также цепи управления - блок управления 14, связанный с силовым блоком 15, соединенным с двигателем 16 и обмоткой электромагнитной муфты 6. Блок управления 14 содержит кнопки 17-21,, ключ 22 выбора режима работы. реле 23, 24 и пускатели 25 и 26. Кнопка 17 предназначена для выключения реле 23 включения питания пускателей 25 и 26 привода перемещения 12 и электромагнитной муфты 6. Кнопка 18 предназначена для включения реле 23. Кнопки 19-21 предназначены для управления пускателями 25 и 26 в режиме непрерывного перемещения привода. Реле 24 предназначено для подготовки цепи выключения реле 23 при возвращении переключающей пластины 5 в исходное положение. Устройство работает следующим образом. Оператор в зависимости от выбранного режима работы переставляет ключ 22 выбора режима в правое или левое положе«ие. При этом левое положение ключа 22 соответствует шаговому позиционированию, а правое - режиму непрерывного переме- щения. При шаговом поз1Шионировании с из, . меняющим началом поз-иционирования необходимо иметь исходную точку отсчета шага. За исходное положение принимается положение, при котором переключатель 9 исходного положения включен, при этом переключающаяся пластина 5 воздействует на переключатель 9, а реле 23 включения питания находится в верхнем .положении (контакт 23 по цепи III замкнут). Для запоминания командоаппаратом положения начала позиционирования oneратор сначала нажимает кнопку 17 (цепь I). При этом напряжение питания через замыкающие контакты кнопки 17 и реле 23 подается на реле 23, которое переключается, размыкая свои замыкающие контакты 23 по цепям III, IV, VII и XI. При этом выключается муфта 6 (цепь XI), рычаг 3 с прикрепленным к нему грузом 4 и переключающей пластиной 5 под действием силы тяжести устанавливается в вертикальное положение, а переключающая пластина 5 взаимодействует с переключателем 9 исходного положения, который замыкает свой контакт 9 по цепи II. Затем для включения реле 23 в исходное положение оператор нажимает кнопку 18 (цепь II), при этом напряжение питания через замыкающие контакты переключателя 9 исходного положения и кнопки 18 и через размыкающий контакт реле 23 подается на реле 23, которое замыкает свои замыкающие контакты по цепям III, IV, VII и XI. Устройство готово к работе, т. е. исходная точка начала позиционирования зафиксирована. Для перемещения при позиционировании в прямом направлении оператор нажимает на кнопку 19. Напряжение питания через замыкающий контакт реле 23, размыкающий контакт переключателя 10, ключ 22, замыкающий контакт кнопки 19, размыкающий контакт пускателя 26 подается на пускатель 25. Включается пускатель 25, который своими силовыми контактами (не показанными на фиг. 2) включает привод 12, а замыкающим блок-контактом. 25 (цепь VIII) блокирует кнопку 19. Вал 2 посредством электромагнитной муфты 6 соединен с валом 7 согласующей передачи 8, которая передает вращение от привода 12 и поворачивает рычйг 3 с прикрепленным к нему грузом 4 и пёреключающей пластиной 5. При взаимодействии переключающей пластины 5 с переключателем 10 срабатывают размыкающий контакт 10 (цепь VII), который выключает пускатель 25, и замыкающий контакт 1 (цепь V), который включает реле 24, последнее своими замыкающими контактами 24 включается на блокировку контакта 10 (цепь VI) и по цепи III подготавливает цепь для автоматического отключения реле 23 при возвращений позиционируемого органа в исходное положение. Для возвращения позиционируемого органа в исходное положение оператор нажимает на кнопку 20 (цепь IX). При этом через замыкающий контакт реле 23, размыкающий контакт переключателя 11, ключ 22, замыкающий контакт кнопки 20 и размыкающий контакт пускателя 25 включается пускатель 26, который своими силовыми контактами (не показанными на фиг. 2) включает привод 12, а замыкающим блок-контактом 26 (цепь X) блокирует кнопку 20. Перемещение позиционируемого органа в обратном направлении происходит до взаимодействия переключающей пластины. 5 с переключателем 9 исходного положения. При срабатывании переключателя 9 исходного положения замыкается контакт 9 по цепи II и через замыкающие контакты реле 24 и реле 23 (цепь III) переключается реле 23, которое размыкает свои замыкающие контакты 23 по цепям III, IV, VII и XI. При позиционировании в обратном направлении работа устройства аналогична описанному, и остановка привода 12 производится переключателем 11. Выбор направления перемещения позиционируемого органа при непрерывном перемещении обеспечивается кнопками 19 и 20. Остановка при перемещении производится оператором нажатием на кнопку 21 (цепь VIII). Предлагаемый командоаппарат обеспечивает удобство в его обслуживании, надежность в работе и при своей простоте позволяет устранить ручную переналадку устройств выдачи команд при управлении электроприводами механизмов подъема или перемещения различных исполнительных органов при их шаговом позиционировании и обеспечивает дистанционное управление указанными приводами.
V
о
Oi
Г
JL Ж
Ж
J Л
ж
| название | год | авторы | номер документа |
|---|---|---|---|
| Схема управления муфтой кузнечно-прессовых автоматов | 1984 |
|
SU1193014A1 |
| Устройство управления столом станка | 1989 |
|
SU1720836A1 |
| Установка для окраски и сушки изделий | 1986 |
|
SU1426652A2 |
| Установка для окраски и сушки изделий | 1981 |
|
SU954108A1 |
| Устройство для управления столом станка | 1982 |
|
SU1016137A1 |
| Устройство для управления приводом | 1986 |
|
SU1416937A1 |
| Устройство для управления электродвигателем | 1985 |
|
SU1310981A1 |
| Устройство поворота многошпиндельного барабана токарного автомата | 1979 |
|
SU856661A1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА НА ПОЗИЦИЮ ТЕХОБСЛУЖИВАНИЯ | 2004 |
|
RU2258011C1 |
| Кинопроекционная установка | 1989 |
|
SU1652960A1 |
КОМ АН ДО АППАРАТ, содержа Ш.ИЙ группу переключателей, устайовлей ных в цепях управления приводом перемещения, связанным с переключающей пластиной через согласующую передачу и включенную с ней последовательно электромагнитную муфту, и цепь управления с реле включения питайия пускателей привода перемещения и электромагнитной муфты, отличающийся тем, что, с целью улучшения условия эксплуатации командоаппарата, он содержит переключатель и.сходйого положения переключающей пластийы, на валу привода перемещения которой установлен неуравновешенный относительно оси вращения пластины груз, причем контакты переключателя исходного положения установлены в цепи управления с реле включения питания пускателей привода перемещения и электромагнитной муфты г.1
23
фиг.1
ш ж
и
СИ
я
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаумян Г | |||
| Я | |||
| и др | |||
| Автоматизация производственных процессов | |||
| М.., «Выс шая школа, 1967, с | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Программное устройство для автоматического перемещения валков нажимных механизмов прокатных станов | 1939 |
|
SU75075A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
