Изобретение относится к автоматике и вычислительной технике и может быть использовано для дистанционного позиционирования различных объектов. - Цель изобретения - повышения точности устройства.
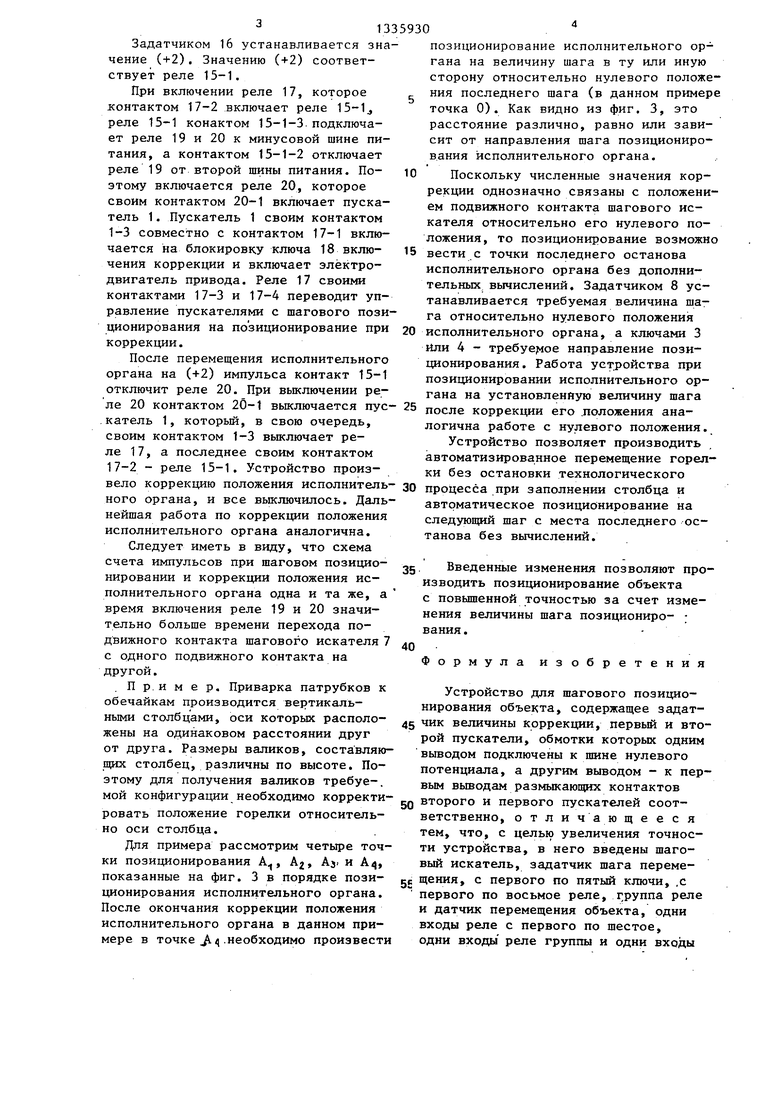
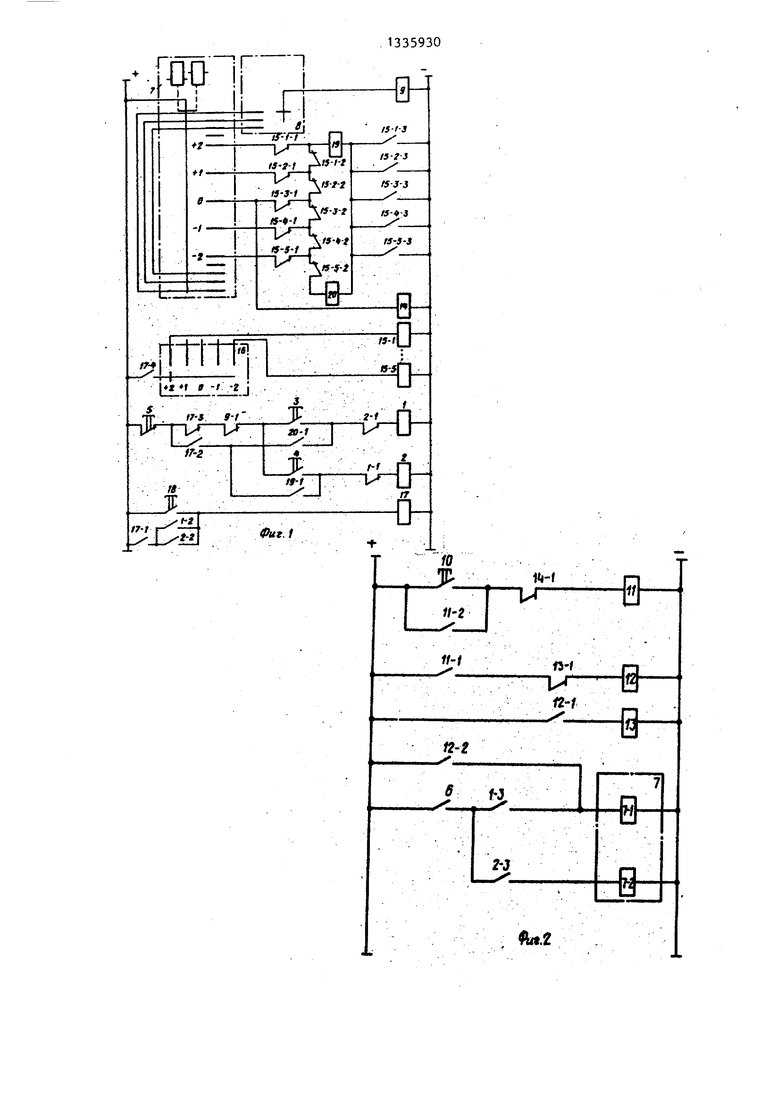
На фиг. 1 и 2 изображена функциональная схема устройства; на фиг. 3 - диаграмма коррекции и позициониро-. вания.
Устройство содержит первый и вто рой пускатели 1 и 2 с размыкающими 1-1, 2-1, nepBbiMH 1-2, 2-2 и вторыми , 2-3 .замыкающими контактами, с первого по третий ключи 3-5, датчик 6 перемещения объекта, шаговый искатель 7 с электромагнитами прямого 7-1 и обратного 7-2 счета, задатчик 8
35
шага перемещения, первое реле 9 с раз-2о и 13. Система позиционирования уста- мыкающим контактом 9-1, четвертый ключ 10, второе реле 11 с первь1м 11-1 и вторым 11-2 замыкающими контактами, третье, реле 12 с первым 12-1 и вторым 12-2 замыкающими контактами, 25 четвертое реле 13 с размыкающим контактом 13-1, пятое реле 14 с размыкающим контактом 14-1, группа от 15-1 по 15-5 реле с первыми с 15-1-1 по 15-5-1, вторыми с 15-1-2 по 15-5-2 зо размыкающими и замыкающими -с 15-1-3 по 15-5-3 контактами, задатчик 16 величины коррекции, шестое реле 17 с
замыкающими контактами первым 17-1 и вторым 17-2, размыкающим контактом 17-3 и третьим замыкающим контактом 17-4, пятый ключ 18, седьмое реле 19 с замыкающим контактом 19-1, восьмое реле 20 с замьжающим контактом 20-1.
Устройство работает следующим образом.
Перед началом устройство управ- ления позиционированием устанавливают в исходное положение включени- 45 ем ключа 10 (фиг. 2). ,При включении ключа 10 через размыкающий контакт- 14-1 реле нулевого положения включается реле 11, которое своим контактом 11-1 включается на блокировку 50 ключа 10, а контактом 11-2 включает . генератор импульсов, состоящий из двух реле 12 и 13.
При включении реле 12 включения электромагнита контактом 12-1 вклю- 55 чается реле 13, а контактом 12-2 - электромагнит 7-1 шагового искателя 7, Время срабатывания электромагнита 7-1 должно быть меньше времени
40
новлена в исходное положение.
Позиционирование на величину шага происходит следующим образом.
Задатчиком 8 устанавливается величина шага позиционирования исполнительного органа. Включением ключей 3 или 4 включается пускатель 1 или 2 вперед или назад, соответственно. При включении пускателя 1 или 2 контакты пускателей 1-3 или 2-3 .будут постоянно замкнуты и включение электромагнитов 7-1 или 7-2 ша.гового .искателя 7 будет осуществляться с помощью замыкающего контакта датчика 6 перемещения (фиг. 2).
При совпадении контактов шагового искателя 7 и задатчика 8,.величины - шага включается реле 9, которое своим контактом 9-1 выключит пускатель 1 или 2.
После позиционирования систему позиционирования устанавливают в исходное положение включением ключа 10.
Коррекция положения исполнительного органа происходит следующим образом.
Задатчиком 16 устанавливается величина коррек1щи с учетом величины и шага коррекции относительно нулевого положения исполнительного органа. Включением ключа 18 включается реле 17, которое осуществляет коррекцию положения исполнительного органа.
Для примера рассмотрим коррекцию положения исполнитепьного органа на (+2) импульса относительно нулевого положения.
срабатывания реле 13. Включается реле 13, которое своим контактом 13-1 выключит реле 12, которое, в свою очередь, выключит реле 13 и электромагнит 7-1, При выключении реле 13 снова включится реле 12 и весь цикл повторится.
При каждом срабатывании электромагнита 7-1 шагового искателя 7 про- исходит перемещение подвижного контакта на следующую позицию. При установке подвижного контакта
в позицию, принятую за нулевую, включается реле 14 (фиг. 1), которое своим контактом 14-1 (фиг. 2) выключит реле 11, которое, в свою очередь, своим контактом 11-2 выключит реле 12
5
о и 13. Система позиционирования уста- 5
о
5 0
5
0
новлена в исходное положение.
Позиционирование на величину шага происходит следующим образом.
Задатчиком 8 устанавливается величина шага позиционирования исполнительного органа. Включением ключей 3 или 4 включается пускатель 1 или 2 вперед или назад, соответственно. При включении пускателя 1 или 2 контакты пускателей 1-3 или 2-3 .будут постоянно замкнуты и включение электромагнитов 7-1 или 7-2 ша.гового .искателя 7 будет осуществляться с помощью замыкающего контакта датчика 6 перемещения (фиг. 2).
При совпадении контактов шагового искателя 7 и задатчика 8,.величины - шага включается реле 9, которое своим контактом 9-1 выключит пускатель 1 или 2.
После позиционирования систему позиционирования устанавливают в исходное положение включением ключа 10.
Коррекция положения исполнительного органа происходит следующим образом.
Задатчиком 16 устанавливается величина коррек1щи с учетом величины и шага коррекции относительно нулевого положения исполнительного органа. Включением ключа 18 включается реле 17, которое осуществляет коррекцию положения исполнительного органа.
Для примера рассмотрим коррекцию положения исполнитепьного органа на (+2) импульса относительно нулевого положения.
Задатчиком 16 устанавливается значение (+2). Значению (+2) соответствует реле 15-1.
При включении реле 17, которое контактом 17-2 включает реле 15-1j реле 15-1 конактом 15-1-3. подключает реле 19 и 20 к минусовой шине питания, а контактом 15-1-2 отключает реле 19 от второй шины питания. По- этому включается реле 20, которое своим контактом 20-1 включает пускатель 1. Пускатель 1 своим контактом 1-3 совместно с контактом 17-1 включается на блокировку ключа 18 вклю- чения коррекции и включает электродвигатель привода. Реле 17 своими контактами 17-3 и 17-4 переводит управление пускателями с шагового позиционирования на позиционирование при коррекции.
После перемещения исполнительного органа на (+2) импульса контакт 15-1 отключит реле 20. При выключении реле 20 контактом 20-1 выключается пус .катель 1, который, в свою очередь, своим контактом 1-3 выключает реле 17, а последнее своим контактом
Устройство позволяет производить автоматизированное перемещение горе ки без остановки технологического
17-2 - реле 15-1. Устройство произвело коррекцию положения исполнитель- зо процесса при заполнении столбца и ного органа, и все выключилось. Даль- автоматическое позиционирование на
нейшая работа по коррекции положения исполнительного органа аналогична.
Следует иметь в виду, что схема счета импульсов при шаговом позиционировании и коррекции положения исполнительного органа одна и та же, а время включения реле 19 и 20 значительно больше времени перехода подвижного контакта шагового искателя 7 с одного подвижного контакта на другой.
П р.и м е р. Приварка патрубков к обечайкам производится вертикальными столбцами, оси которых расположены на одинаковом расстоянии друг от друга. Размеры валиков, составляющих столбец, различны по высоте. Поэтому для получения валиков требуе-. мой конфигурации необходимо корректировать положение горелки относительно оси столбца.
Для примера рассмотрим четыре точки позиционирования А, Aj, Aj. и , показанные на фиг. 3 в порядке позиционирования исполнительного органа. После окончания коррекции положения исполнительного органа в данном примере в точке Ji ц .необ-хоцямо произвести
35
40
следующий шаг с места последнего ос танова без вычислений.
Введенные изменения позволяют пр изводить позиционирование объекта с повышенной точностью за счет изме нения величины шага позициониро- ; вания.
Формула изобретени
Устройство для шагового позиционирования объекта, содержащее задат 45 чик величины коррекции, первый и вт рой пускатели, обмотки которых одни выводом подключены к шине нулевого потенциала, а другим выводом - к пе вым выводам размыкающих контактов 5Q второго и первого пускателей соответственно, отличающееся тем, что, с целью увеличения точнос ти устройства, в него введены шаговый искатель, задатчик шага перемере щения, с первого по пятый ключи, ,с первого по восьмое реле, г,руппа рел и датчик перемещения объекта, одни входы реле с первого по шестое, одни входы репе группы и одни входы
позиционирование исполнительного органа на величину шага в ту или иную сторону относительно нулевого положения последнего шага (в данном пример точка 0). Как видно из фиг. 3, это расстояние различно, равно или зависит от направления шага позиционирования исполнительного органа.
Поскольку численные значения коррекции однозначно связаны с положением подвижного контакта шагового искателя относительно его нулевого положения, то позиционирование возможн вести с точки последнего останова исполнительного органа без дополнительных вычислений. Задатчиком 8 устанавливается требуемая величина шага относительно нулевого положения исполнительного органа, а ключами 3 Или 4 - Tpe6yef4oe направление позиционирования. Работа устройства при позиционировании исполнительного органа на установленную величину шага после коррекции его .положения аналогична работе с нулевого положения.
Устройство позволяет производить автоматизированное перемещение горелки без остановки технологического
процесса при заполнении столбца и автоматическое позиционирование на
35
40
следующий шаг с места последнего останова без вычислений.
Введенные изменения позволяют производить позиционирование объекта с повышенной точностью за счет изменения величины шага позициониро- ; вания.
Формула изобретения
Устройство для шагового позиционирования объекта, содержащее задат- чик величины коррекции, первый и второй пускатели, обмотки которых одним выводом подключены к шине нулевого потенциала, а другим выводом - к первым выводам размыкающих контактов второго и первого пускателей соответственно, отличающееся тем, что, с целью увеличения точности устройства, в него введены шаговый искатель, задатчик шага перемеения, с первого по пятый ключи, ,с первого по восьмое реле, г,руппа реле и датчик перемещения объекта, одни входы реле с первого по шестое, одни входы репе группы и одни входы
электромагнитов прямого и обратного снета шагового искателя соединены с шиной нулевого потенциала, шина питания через последовательно соединенные первый замьжающий контакт шестого реле и первые замыкающие контакты первого и второго пускателей соединена с другим выводом обмотки шестого реле, подключенной к шине пита- .ния через пятый ключ, второй ВБШОД размыкающего контакта второго пускателя подключен к шине питания через последовательно соединенные первый ключ, размыкающий контакт первого реле, размыкающий контакт шестого реле, третий ключ, а также через последовательно соединенные замыкающий контакт восьмого и второй-замыкающий контакт шестого реле,., второй вывод размыкающего контакта второго пускателя соединен с шиной питания через последовательно соединенные второй ключ, размыкающие контакты первого и шестого реле, третий ключ, а также через замыкающий контакт седьмого реле, второй замыкающий контакт шестого реле, третий ключ, шина питания подключена через последовательно соединенные третий замыкающий Контакт шестого реле и задатчик величины- коррекции к другим выводам обмоток реле группы, через последовательно соединенные четвертый ключ и размьжающий контакт пятого реле - к другому вьшоду обмотки второго реле, через 1 оследова;гельно соединенные
5
.первьш замыкающий контакт второго и размыкающий контакт четвертого реле - к другому выводу обмотки третьего реле, через первый замыкающий контакт третьего реле - к другому выводу обмотки четвертого реле, через второй замьжающий контакт третьего реле - к другому вьшоду электромагнита прямого счета шагового искателя, через последовательно соединенные датчик перемещения объекта и второй замыкающий контакт первого пускателя - к другому выводу электромагнита прямого счета шагового искателя и через последовательно соединенные датчик перемещения и второй замыкающий контакт второго пускателя - к другому выводу.электромагнита обратного счета шагового искателя, подвижный контакт которого соединен с шиной -питания, а неподв1таные контакты первой группы - через последовательно соединенные первые и вторые размыкающие 5 контакты реле группы, обмотки девятнадцатого и двадцатого реле и замыкающие контакты реле группы подключены к шине нулевого потенциала, неподвижные контакты Второй группы шагового искателя через задатчик величины шага подсоединены к другому выводу обмотки первого реле, контакт нулевого положения ша.говогЬ искателя соединен с другим вьшодом обмотки пятого реле, выводы второго замыкающего контакта второго реле подключены параллельно к вьшодам четвертого ключа.
0
0
5
Лз Л1
-h
. Составитель И.Алексеев Редактор В.Данко Техред В.Кадар Корректор л.Вескид
™ в «« « иввввв ивив ии ииви™в иви 1в,
Закаэ 4045/40 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Аг А,
-ь/
й/г.;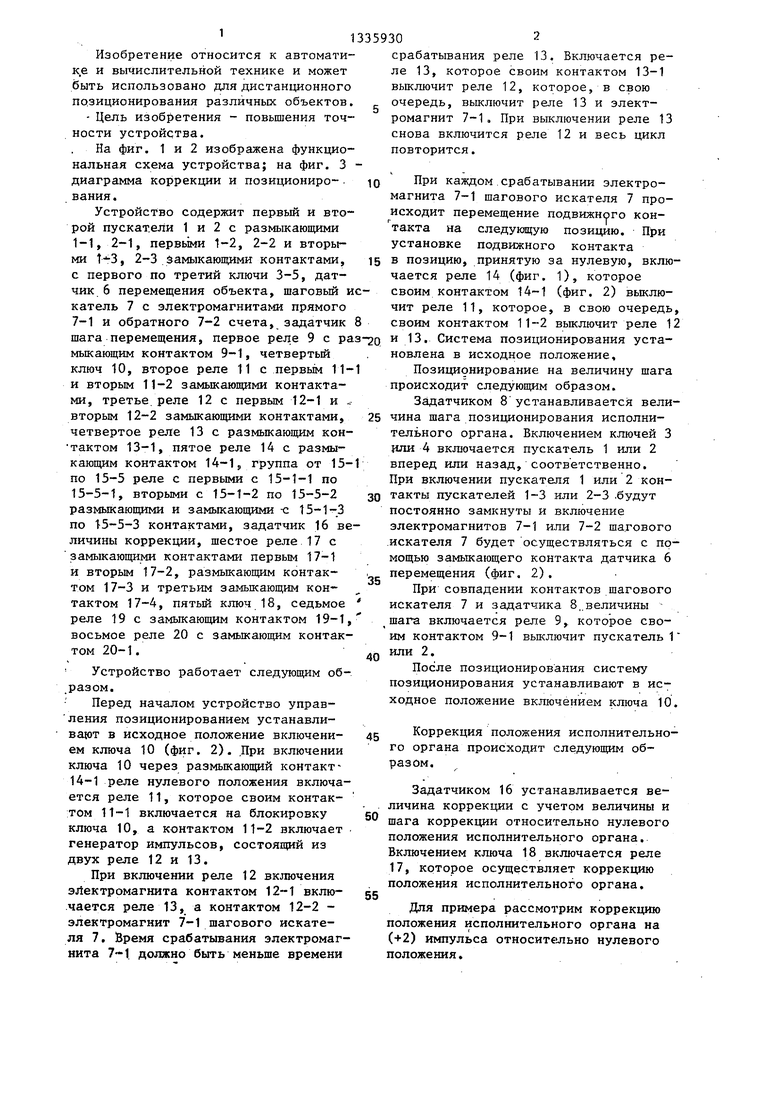
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления шаговым перемещением исполнительного органа | 1983 |
|
SU1228077A1 |
| Устройство для программного управления перемещением объекта | 1981 |
|
SU957170A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1983 |
|
SU1137033A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1982 |
|
SU1174905A1 |
| Стационарная установка для ультрафиолетового облучения | 1990 |
|
SU1798934A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1987 |
|
SU1456348A1 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для решения задач типа балансирования сборочной линии | 1983 |
|
SU1167622A1 |
| Автоматическая линия размерной химической обработки | 1978 |
|
SU734315A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для дистанционного позиционирования. Цель изобретения - повышение точности устройства. Устройство для шагового позиционирования содерзкит пускатели, , датчик перемещения объекта, шаговый искатель, задатчик шага перемещения, репе, группу реле,,задатчик величины коррекции. Повышение точности устройства достигается за счеу возможности установки переменного шага коррекции. 3 ил.I со. 00 сд со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1975 |
|
SU570882A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
