00
со sj
Изобретение относится к автоматическому управлению приводом при шаговом перемещении с постоянной величиной шага заданной точности и мо- «ет быть использовано для управления приводом позиционирования поворотно- делительных столов, стендов для контроля и разметки изделий, устройств Для УЗ-контроля и др.
Целью изобретения является обеспечение заданной точности позиционирования и снижение погрешности.
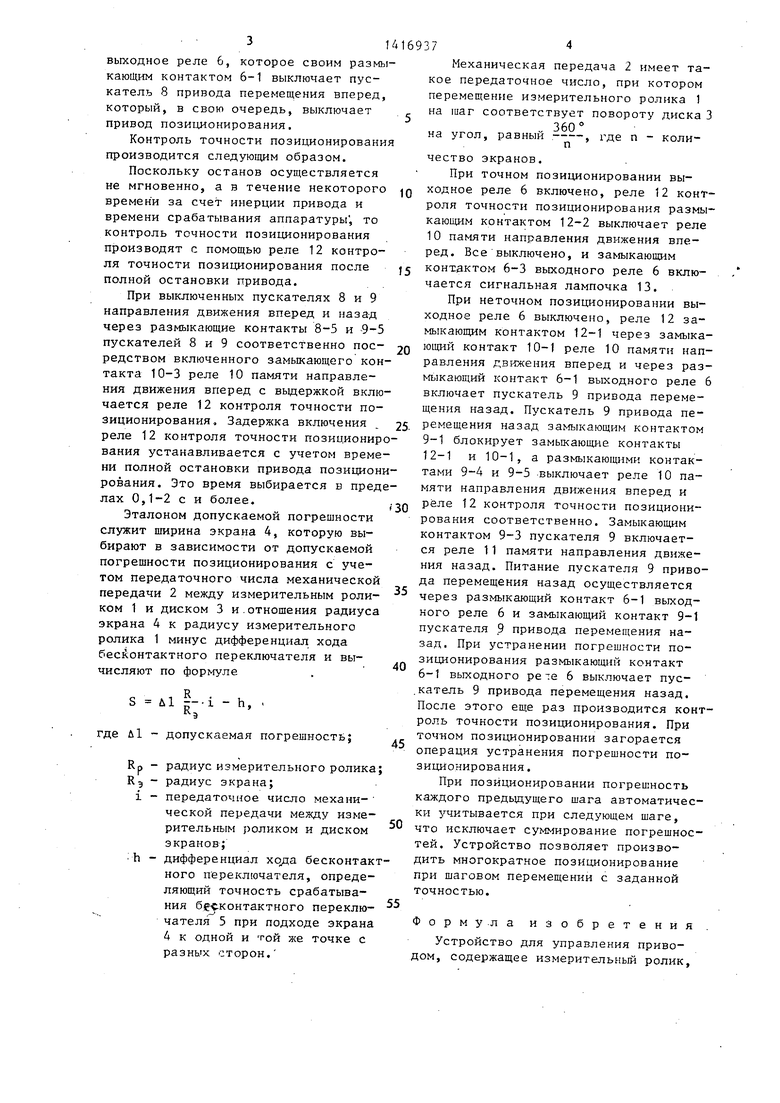
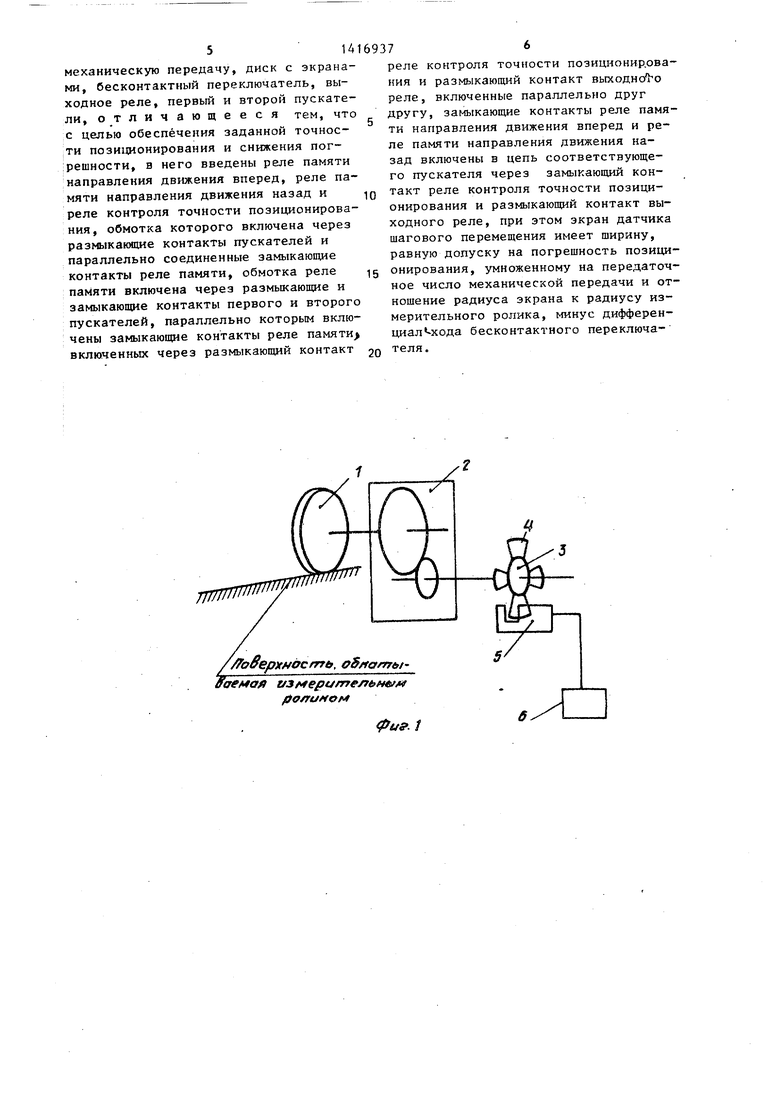
На фиг. 1 представлена схема включения датчика шагового перемещения; на фиг. 2 - принципиальная схема устройства.
Устройство (фиг, .1) содержит при- йод позиционирования (не показан), Измерительный ролик 1, механическую передачу 2, диск 3, экраны 4 , бес- Контактный переключатель 5, выходное реле 6 (фиг. 2), размыкающие контакты 6-1 и 6-2, замыкающий контакт 6-3 выходного реле 6, кнопку 7 включения привода, замыкающие контакты 7-1, 7-2 кнопки 7 включения привода, пускатель 8 привода перемещения вперед, замыкающий контакт 8-1, размыкающий контакт 8-2, замыкающий контакт 8-3, размыкаюшие контакты 8-4, 8-5 пуска- теля 8 привода перемещения вперед, пускатель 9 привода перемещения назад, размыкающий контакт 9-1, замыкающий контакт 9-2, размыкающие кон- такты 9-3, 9-4, 9-5 пускателя 9 привода перемещения назад, реле 10 памяти направления движения вперед, замыкающие контакты 10-1, 10-2, 10-3 реле 10 памяти направления движения впе- ред, реле 11 памяти направления движения назад, замыкающие контакты 1111-2, 11-3 реле 11 памяти направления движения назад, реле 12 контроля точности позиционирования (реле времени замыкающий контакт 12-1, размыкающий контакт 12-2 реле 12 контроля точности позиционирования, сигнальную лампу 13, кнопку 14 выключения.
Устройство работает следующим образом.
В исходном положении устройства один из экранов 4 находится в щели бесконтактного переключателя 5, ко- торый при этом включает выходное реле 6. Включенная лампочка 13 сигнализирует о том, что установка находится в исходном положении.
- o
5
0 5 0 5 0 5
0
Установку экрана в щель бесконтактного переключателя можно производить следующими способами.
1.Экран перемещается приводом до тех пор, пока он не войдет в щель бесконтактного переключателя.
2.Диск экранов выводят из зацепления с механической передачей, экран устанавливают в щель бесконтактного переключателя и диск вновь соединяют с механической передачей.
3.Бесконтактный переключатель перемещается до тех пор, пока экран не окажется в его щели.
Первый способ применяется в тех случаях, когда точку начала позиционирования можно выбрать произвольно (например, при контроле качества сварки, при позиционировании для сварки диафрагм и т.д.). Второй и третий способы - с установленной точкой начала позиционирования, например, при разметке и сварке трубных досок и др.
Позиционирование на величину шага происходит следующим образом.
Оператор нажимает кнопку 7 включения привода позиционирования. Посредством замыкающих контактов 7-2 и 7-1 кнопки 7 включения привода через контакт 9-2 включается пускатель 8 привода перемещения впе ред. При выходе экрана 4 из щели бесконтактного переключателя 5 выключается выходное реле 6 и питание пускателя 8 привода перемещения вперед осуществляется размыкающим контактом 6-1 выходного реле 6 и замыкающим контактом 8-1 пускателя 8 привода перемещения вперед. Выключение сигнальной лампы 13 сигнализирует оператору о возможности отпускания кнопки 7 включения привода. Замыкающим контактом 8-3 пускателя 8 привода перемещения вперед через размыкающий контакт 9-4 пускателя 9 привода перемещения назад включается реле 10 памяти направления движения - вперед, которое через размыкающий контакт 12-2 реле 12 контроля точности позиционирования посредством замыкающего контакта 10-2 реле 10 памяти направления движения вперед включается на блокировку замыкающего контакта 8-3 пускателя 8 привода пере- мегдения вперед.
При перемещении исполнительного органа или изделия на величину шага экран 4, проходя через щель бесконтактного переключателя 5, включает
31
выходное реле 6, которое своим размыкающим контактом 6-1 выключает пускатель 8 привода перемещения вперед, который, в свою очередь, выключает привод позиционирования.
Контроль точности позиционирования производится следующим образом.
Поскольку останов осуществляется не мгновенно, а в течение некоторого времен и за счет инерции привода и времени срабатывания аппаратуры , то контроль точности позиционирования производят с помощью реле 12 контроля точности позиционирования после полной остановки привода.
При выключенных пускателях 8 и 9 направления движения вперед и назад через размыкающие контакты 8-5 и -9-5 пускателей 8 и 9 соответственно пос- редством включенного замыкающего контакта 10-3 реле 10 памяти направления движения вперед с выдержкой включается реле 12 контроля точности позиционирования. Задержка включения . реле 12 контроля точности позиционирования устанавливается с учетом времени полной остановки привода позиционирования. Это время выбирается в пределах 0,1-2 с и более.
Эталоном допускаемой погрешности служит ширина экрана 4, которую выбирают в зависимости от допускаемой погрешности позиционирования с учетом передаточного числа механической передачи 2 между измерительным роликом 1 и диском 3 и.отношения радиуса экрана 4 к радиусу измерительного ролика 1 минус дифференциал хода бес1.онтактного переключателя и вычисляют по формуле
S Л1 ---i - h, . э
где Д1 - допускаемая погрешность;
RP - радиус измерительного ролика;
R-3 - радиус экрана; i - передаточное число махани- ческой передачи между измерительным 1)оликом и диском экранов;
h - дифференциал хода бесконтактного переключателя, определяющий точность срабатывания бе-сконтактного переклю- чателя 5 при подходе экрана 4 к одной и той же точке с разных сторон,
д 5
0 5- Q
0
5
0
37
Механическая передача 2 имеет такое передаточное число, при котором перемеа ение измерительного ролика 1 на шаг соответствует повороту диска 3
„360°
на угол, равный ., где п - колип
чество экранов.
При точном позиционировании выходное реле 6 включено, реле 12 контроля точности позиционирования размыкающим контактом 12-2 выключает реле 10 памяти направления движения вперед. Все выключено, и замыкающим контактом 6-3 выходного реле 6 включается сигнальная лампочка 13.
При неточном позиционировании выходное реле 6 выключено, реле 12 замыкающим контактом 12-1 через замыкающий контакт 10-1 реле 10 памяти направления движения вперед и через размыкающий контакт 6-1 выходного реле 6 включает пускатель 9 привода перемещения назад. Пускатель 9 привода перемещения назад замыкающим контактом 9-1 блокирует замыкающие контакты 12-1 и 10-1, а размыкающими контактами 9-4 и 9-5 выключает реле 10 памяти направления движения вперед и реле 12 контроля точности позиционирования соответственно. Замыкающим контактом 9-3 пускателя 9 включается реле 11 памяти направления движения назад. Питание пускателя 9 привода перемещения назад осуществляется через размыкающий контакт 6-1 выходного реле 6 и замыкающий контакт 9-1 пускателя 9 привода перемещения назад. При устранении погрешности позиционирования размыкающий контакт 6-1 выходного ре-е 6 выключает пус- .катель 9 привода перемещения назад. После этого еще раз производится контроль точности позиционирования. При точном позиционировании загорается операция устранения погрешности позиционирования .
При позиционировании погрешность каждого предьздущего шага автоматически з читывается при следующем шаге, что исключает суммирование погрешностей. Устройство позволяет производить многократное позиционирование при шаговом перемещении с заданной точностью.
Форму.л а изобретения .
Устройство для управления приводом, содержащее измерительный ролик.
5 U
механическую передачу, диск с экранами, бесконтактный переключатель, выходное реле, первый и второй пускатели, отличающееся тем, что с целью обеспечения заданной точности позиционирования и снижения пог- ;решности, в него введены реле памяти направления движения вперед, реле памяти направления движения назад и реле контроля точности позиционирования, обмотка которого включена через размыкающие контакты пускателей и параллельно соединенные замыкающие контакты реле памяти, обмотка реле памяти включена через размыкающие и замыкающие контакты первого и второго пускателей, параллельно которым включены замыкающие контакты реле памяти включенных через размыкающий контакт
76
реле контроля точности позиционир.ова- ния и размыкающий контакт выходно Ьо реле, включенные параллельно друг другу, замыкающие контакты реле памяти направления движения вперед и реле памяти направления движения назад включены в цепь соответствующего пускателя через замыкающий контакт реле контроля точности позиционирования и размыкающей контакт выходного реле, при этом зкран датчика шагового перемещения имеет ширину, равную допуску на погрещность позици
онирования, умноженному на передаточное число механической передачи и от- нощение радиуса экрана к радиусу измерительного ролика, минус дифферен- циал -хода бесконтактного переключателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство управления столом станка | 1989 |
|
SU1720836A1 |
| Электропривод тактового стола | 1987 |
|
SU1504774A1 |
| Устройство для адресования транспортного средства с электроприводом | 1987 |
|
SU1431988A2 |
| Устройство для дистанционного управления транспортным комплексом | 1974 |
|
SU553712A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1613410A2 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Устройство для управления электродвигателем | 1985 |
|
SU1310981A1 |
Изобретение касается автоматического управления приводом при шаговом перемещении с постоянной величиной шага заданной точности и может быть использовано для управления .приводом позиционирования поворотно- делительных столов, стендов для конт- роля и разметки изделий, устройств для ультразвукового контроля. Цель изобретения - обеспечение заданной точности позиционирования и снижение погрешности при многократном позиционировании. Контроль точности позиционирования производится с помощью реле контроля точности позиционирования, а исключение погрешностей позиционирования обеспечивается с помощью двух реле памяти направления движения и реле контроля точности позиционирования, контакты которых соответственно включены в цепь питания пускателей привода. 2 ил. .а (Л
зжмость, оВ о/гть1ffcreAtoA t/3Meptj/rrej7t Hefff /tc/ru oM
ffuff. /
Ц
| ЭЛЕКТРИЧЕСКИЙ ОГРАНИЧИТЕЛЬ ВРАЩЕНИЯ ВАЛА | 0 |
|
SU377755A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 0 |
|
SU373700A1 | |
| Кипятильник для воды | 1921 |
|
SU5A1 |
