Изобретение относится к машкно- crpoeHHFo, в частности к промышленным роботам, и может быть использовано для автоматизации технологических процессов.
Цель изобретения - расширение тех нологических козможностей манипулятора nyj eM увеличения количества точек позициог-тировапкя и уменьшение габаритов.
На 4 Vir, 1 показан привод общий вид на фигч 2 - функциональная схема управления.
Устройство содержит установленную на звене I с возможностдзю поворота ось 2,, жестко связанную со зве- Hobf 3, два постоянных магнита 4 и 5, выполненных в вид.е двух секторов, расположенных в одной плоскости по обе стороны от оси 2, жестко с ней связанных и намагниченных параллельно оси во встречном один отЕ осительн другого направлении. Два двухполюсных эле.ктромагнита5 закрепленных па осиованни параллельно друг другу по обе стороны от,постоянных магнитов 4 и 5 так 5 что их полюса 6 и 7 повернуты один относительно другого на 90 . Обмоткк 8 и 9 электромагнитов соединены с системой управления, выполненной в виде пpc гpa nvrнoгo блока 10 с тремя выходами,, датчика 11 положения оси 2, блока 12 сравнения, один из входов которого соединен с датчиком 11 положения оси и первым выходом программного блока 10, цвух блоков 13 н 14 формирования управляющего импульса и релейного элемента ISj входы которых соединены с выходо блока 12 сравнения5 интегратора 16, вход которого соединен с выходок блока 13 формирования управляющего сиг-нала, трех блоков 17,18 и 19 у шоже- ния, первьш вход блока 17 из которь х г .вязан с вторым выходом программного блока 10, ВТОРОЙ вход его - с выходо интегратора 16 и третий вход - с выходом релейного элемента 15s, блока 20 памяти, один вход которого соединен с выходом блока 14 формирования управляющего сигнала а другой - с датчиком Л положения оси 2, сумматора 215 один вход которого соединен с выходом.блока t7 умножения, а другой - с выходом блока 20 памяти, блока 22 формирования косинусоидаль- ной функции и блока 23 формкрования синусоидальной функции,, входы кото12 9СЗЗ3
рых соедннен з с выходом сумматора
/ 1, и двух усилителей 24 и 25, при эт ом выход кагадого блока 22 и 23 форкиронания функций через последо- ,; вательно соединенные блок 18 умноже- - ния и усилитель 24, а также блок 19 умнсження и усилитель 25 соединен соответственно с обмоткой 8 и 9 элек трол .агнитов. Вторые входы блоков 18 iQ и i9 умножения подключены к третьему выходу программного блока 10.
Устройство работает следующим образом .
С выхода программного блока 10 поступают задающие сигналы, причем сигнал, соответствуют амплитуде А гармонических функций, определяющий требуемую грузоподъемность, поступает с третьего выхода блока 10 па зкоды блоков 18 и 19 умножения, сигнал, соответствующий угловой ча- с- тоте со гармонических функций и про- порцион,альный требуемой угловой скорости вращения оси 2 (т.е., вращаемого 31зена руки робота) , подается с второго выхода блока 10 на первый вход блока 17 умножения, а сигнал, соотистствующий требуемому угловому перемещению ср вращаемого звена, с первого выхода блока 10 поступает .га ог;ин из входов блока 12. На второй вход блока 12 сравнения, как и па первый вход блока 20 памяти, поступает сигнал с выхода датчика 11 положения оси. Таким образом, в блока 20 памяти всегда хранится инфор- г- гация о текущем угловом положении ( оси 2, а на выходе блока 12 сравне- иия формируется сигнал рассогласования Atp
; аА
который одновременно подается на вход релейного элемента 15 и на входы блоков 13 и 14 формирования управляющих ш-1пульсов.
Блок 13J выход которого подключен к второму входу блока 20 памяти, предназначен для управления этим блоком, в частности при поступлении импульсного сигнала с блока 13 блок 20 памяти: подает сигнал, соответствующий текущему значению (f -Ц на второй вход сумматора 21, причем этот сигнал на выходе блока 20 памяти удерживается на одном уровне до поступления второго импульса с выхода блока 13 формирования угравляю- щего И1 .5пульса, Первьш импульс на выходе блока 13 формируется при поступлении на его вход С1 гнала/4с / 0.
I
Затем при поступлении с блока 12 сравнения си гнала/д f/ О (или/4i / где . - величина, соответствующая точности .позиционирования промьппле кого робота) блок 13 прихбдит в исходное состояние, а второй управляющий импульс формируется после поступления на его вход очередного сигнала/ли / 0.
В исходном состоянии/ACf/ О (/UCf/) на выходе интегратора 16 устанавливается сигнал нулевого уровня. При поступлении с блока 12 сравнения сигнала /A(f / О на вход блока 1А формирования управляющего импульса на выходе последнего появляется нечетный выходной импульс, включающий в работу интегратор 16, реализующий функцию, соответствующую текущему моменту времени, отсчтываемому от момента времени, в который с первого выхода программног блока 10 поступил сигнал Cf. т.е. интегратор реализует функцию
t / dt,
В момент времени t, , когда рассогласование /ucf/ станет равным нул второй блок 14 подает четный управляющий импульс на интегратор 16, н выходе которого при этом устанавливается ПОСТОЯННЫ сигнал, соответствующий моменту времени t , В момент поступления следующего нечетного управляющего импульса (при 1щ1 0) на выходе интегратора 16 устанавливается сигнал нулевого урня и реализуется указанная вьше зависимость.
При поступлении сигнала &(f на вход релейного элемента 15 на его выходе формируется сигнал
sign(i4 )
+ 1, при ACf 0(
О, при дс )
1 , при ДЦ .:0 (uCf -) .,
который подается на третий вход блока 17 умножения, на второй вход которого поступает сигнал, соответствующий моменту времени t, с выхода интегратора 16. При этом на выходе блока 17 умножения формируется сигнал со tsign(uCf) , который поступает на первый вход сумматора 21, где он складывается с сигналом ср. , поступающим с блока 20 памяти. Результирующий сигнал со tsign(Aqi) +(рд с выхода сумматора 21 одновременно поступает на входы блоков 22 и 23 формиро4
вания косинусоидальной и синусоидальной функций. Выходные сигналы Cos . uitsign (itf) +Cfo и Sin(jt X Sign(A(/) + + С| д бло ков 22 и 23 поступают соот- 5 ветственно на вторые входы блоков 18 . и 19 умножения. На выходе блока 18 умножения формируется сигнал Acos cotsign (лц)) +(fo, который, проходя через усилитель 24 с коэффици 0 ентом усиления К, поступает на обмотку 8 одного из электромагнитов (например, первого). На обмотку 9 другого электромагнита поступает с выхода усилителя 25 сигнал
5 кЛз1п ы tsign(uq))+(f, который формируется путем усиления вторым усилителем 25 сигнала Asin(0 tsignC/ic) + + , поступающего с выхода блока 19 j умножения,
0
При подаче в обмотку 8 электромагнита тока, пропорционального косинусу заданного угла Cf поворота оси 2 с постоянными магнитами 4 и 5
5 и связанного с ним звена относитель- . но основания, а в обмотку 9 электромагнита тока, пропорционального синусу того же угла (f , между полюсами 6 и 7 сформируется магнитное поле, амплитуда основной пространственной гармонической которого займет угловое положение Cf . Постоянные магниты 4 и 5 втянутся в область поля с наибольшей интенсивностью так, что их ось повернется на такой же угол
5 Cf 5 вместе с постоянньи и магнитами 4 и 5 повернется связанное с ними через ось 2 подвижное звено. При по- вороте оси 2 изменяется выходной сигнал if датчика 11 положения, а амрли0 туда сигнала jip на выходе блока 12 сравнения уменьшается. Когда вращающееся звено, связанное с осью 2, повернется на угол Cf д , на выходе блока 12 сравнения установится сигнал
нулевого уровня iCf 0( ) . В этот момент с первого выхода программного блока 10 поступает сигнал
о новом значении й).„, и т.д. и, та- т эод.
КИМ образом, осуществляется движение 0 звена промышленного робота по требуемой траектории. Направление вращения звена в сторону уменьшения рассогласования U tf 4 jaA 4 обеспечивается релейным элементом 15, согла- сующим направление вращения со знаком рассогласования iCf.
Изменение токов в обмотках электромагнитов по закону косинуса и синуса
0
512290336
обеспечивает постоянство амплитуды следовательно, грузоподъемность зве- основной пространственной гармоники на определяется амплитудой А косину- магнитного поля и вращение магнит- соидального и синусоидального сигна- ного потока с постоянной частотой, лов, задаваемой, как и частота вра- причем величина магнитного потока и, 5 щения и , программным блоком 10.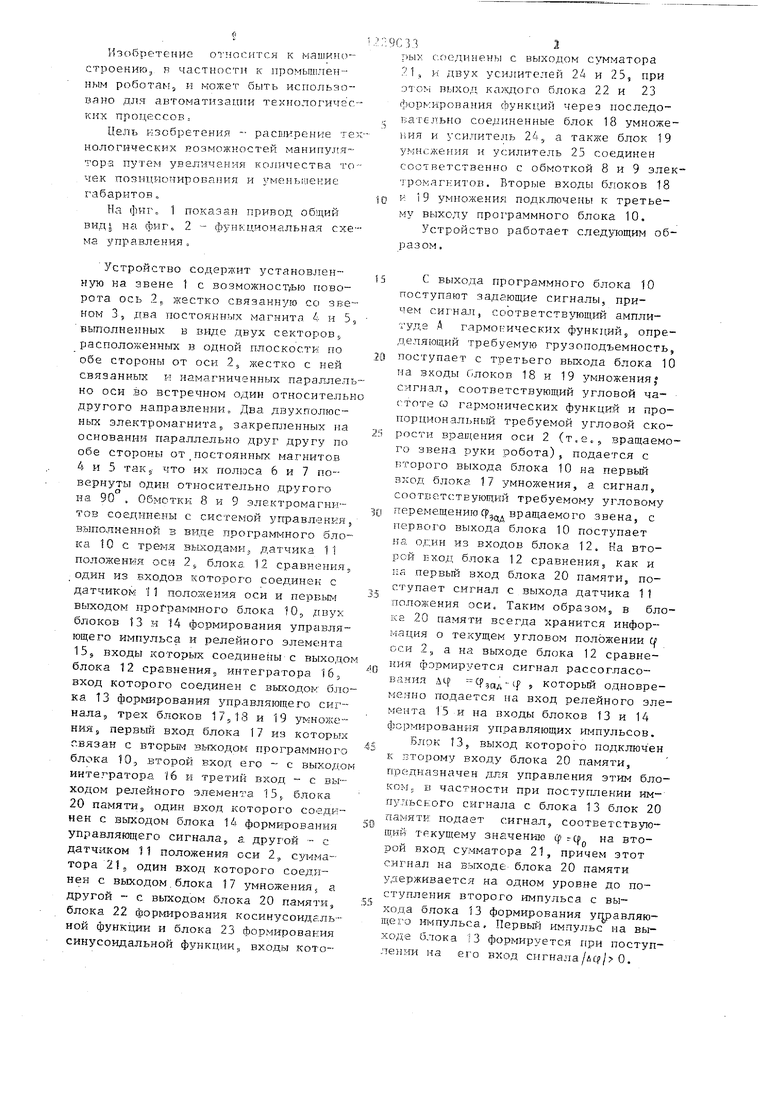


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Устройство для управления приводом робота | 1983 |
|
SU1142810A1 |
| Устройство для автоматической защиты тепловыделяющей поверхности от пережога при наступлении кризиса теплообмена | 1985 |
|
SU1273681A1 |
| Устройство для измерения нагрузочного момента электропривода | 1981 |
|
SU993058A1 |
| Устройство для компенсации нелинейности объекта типа "люфт | 1983 |
|
SU1108387A1 |
| Устройство для полунатурного моделирования робота | 1986 |
|
SU1444833A1 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| Следящая система | 1981 |
|
SU1012193A1 |
| Электрогидравлический следящий привод | 1984 |
|
SU1195076A1 |

rio
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
