00
со
00
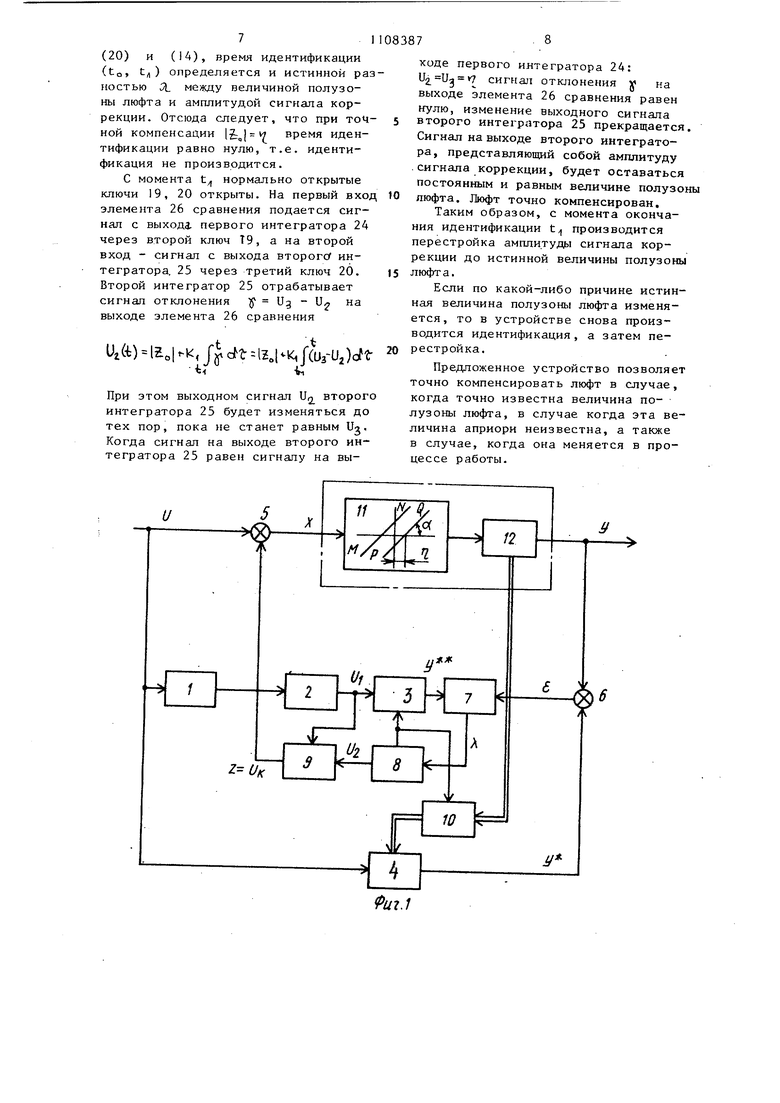
Изобретение относится к автомати ке и предназначено для использования в системах автоматики различного назначения, имеющих в своем сост ве инерционные звенья с нелинейными статическими характеристиками типа люфт. Известно устройство для компенса ции люфта исполнительного устройств системы управления, содержащее посл довательно соединенные дифференциатор, усилитель с зоной нечувствител ности и релейной характеристикой, сумматор, второй вход которого соединен с входом дифференциатора, а в ход - с входом звена с нелинейность типа люф:, причем амплитуда сигна ла коррекции на выходе усилителя равна предельно допустимой ширине полузоны люфта 1. Наиболее близким к изобретению по технической сущности и достигаемому эффекту является устройство дл компенсации нелинейности тица люфт содержащее последовательно соединены.,ie дифференциатор, релейный эле мент и сумматор, второй вход которого соединен с входом дифференциатора, а выход - с входом звена с не линейностью типа люфт 121. Недостаток указанных устройств невозможность точной компенсации люф та из-за г остоянной амплитуды сигнала коррекции, тогда как величина ширины полузоны люфта изменяется в. зависимости от ряда факторов. Цель изобретения - повышение точности компенсации люфта инерционного нелинейного звена, линейная инерционная часть которого находится на выходе нелинейности, выходной сиг нал которой недоступен измерению. Поставленная цель достигается тем, что в устройство для компенсаци нелинейности объекта типа люфт, содержащее последовательно соединенные первый сумматор, нелинейность типа люфг и линейную часть объекта, а также последовательно соединенные дифференциатор и релейный элемент, nepabrfi вход первого сумматора соединен с входом диффеpeHr.piaTopa, а выход - с входом нелинейности типа люфт, дополнительно введены первая модель и последовательно соединен Ш1е ключ, вторая модель, второй сумматор, делитель, блок автоматической подстройки и блок умнсЖЕ ния, выход которого соединен с вторым входом первого сумматора, второй вход - с выходом релейного элемента и через первую модель - с вторым входом делителя, первьй вход ключа соединен с первым выходом линейной части объекта, а второй вход - с выходом блока автоматической подстройки и с вторым входом первой модели, второй вход второго сумматора соединен с вторым выходом линейной части объекта, второй вход второй модели соединен с входом дифференциатора и первым входом первого сумматора. : На фиг. 1 представлена функциональная схема предлагаемого устройства; на фиг. 2 - функциональная схема блока 8 автоматической подстройки; на фиг. 3 - диаграмма сигналов, поясняющая работу бл-ка 8 автоматической подстройки. Устройство на фиг. 1 содержит дифференциатор 1, релейный элемент 2, гРервую и вторую линейные модели 3, 4, первый и второй сумматоры 5, 6, делитель 7, блок 8 автоматической подстройкиi блока 9 умножения и первый ключ 10, нелинейность типа люфт 1J и линейную часть объекта 12. Устройство на фиг. 2 содержит блок 13 выделения модуля, компаратор 14, генератор 15 пилообразного напряжения, первый, второй и третий формирователи 16, 17 и 18, второй, третий. Четвертый, пятый и шестой ключ 19 - 23, первый и второй интеграторы 24, 25 и элемент сравнения 26. Пусть линейная инерционная часть описывается уравнением + а.,у b и. гйе UH - выходной сигнал люфта; 4 - выходной сигнал линейной инерционной части; Ь, а , (,1,..., п-1) - постоянные коэффициенты. Введем обозначения У1 У: у Уд ; УИ . -a,, --а,, У,, -ьЬи. Уравнение (1) в новых обозначениях римет вид У АУ + Ви Уравнения первой и второй линей ной модели у лу + где oL - коэффициент наклона линейных участков MN, PQ люфта. Входной сигнал U поступает одно временно на первый вход первого су матора 5, на вход дифференциатора на вход второй модели 4, На первьм вход второго сумматора b подается выходной сигнал второй модели, а на второй вход - инверсный сигнал с выхода линейной части нелинейного звена - Л| . Выходной сигнал второго сумматора 6 подается на первый вход делителя 7. На второй вход делителя 7 поступает сигнал с выхода первой линейной модели 3. Выходной сигнал делителя 7 поступает на вход блока 8 автоматической подстройки. Сигнал с первого выхода блока 8 автоматической подстройки подается на первый вход блока 9 умножения, а сигнал с второго выхода блока 8 автоматической -подстройки поступает на второй вход первой линейной мод ли 3 и управляющий вход первого клю ча 10. Выходной сигнал дифференциа тора 1 подается на вход релейного элемента 2, Сигнал с выхода релейного элемента 2 одновременно посту пает на вход первой линейной модели 3 и на второй вход блока 9 умно жения. Выходной сигнал блока 9 умножения поступает на второй вход первого сумматора 5. С выхода первого сумматора сигнал подается на вход нелинейного звена с люфтом. Векторный выход линейной части нелинейного звена соединен с векторны входом второй линейной модели 4. Устройство работает следующим образом. Пусть в начальный момент времени t появится выходной сигнал U.На выходе релейного элемента 2 получится сигнал и, а-sign U (). В блоке 9 умножения сигнал Ui умножается с выходным сигналом и„ блока 8 автоматической подстройки Z U;, - и и Ui/. Сигнал Ufj на выходе блока 8 подстройки всегда имеет положительную полярность и величину, равную а.тлитуде сигнала коррекции /Z/. Начальное значение сигнала на выходе второго интегратора 25 (фиг.2) U2o /Zo/, поэтому сигнал коррекции Z в начальный момент to равен Z(tj,) /Z., Д Sign и , В первом сумматоре 5 входной сигнал суммируется с сигнапом {Коррекции X U + Z,,, U+/Z,,/ Sign и . При работе на участках Ш, PQ люфта выходной сигнал U люфта равени„ K( U+/Zo/ Sign и).(5) Вектор состояния линейной инерционной части имеет вид Y(-t)Ф(t,-to)Y(t„V (i,J:)bU«(tH 1 (t,i,)Y(:-to) Гф(4г)Вк(и- е|9пи 4 J.J/f .|si()aft. Вектор состояния jniHeHHMx моелейY(iV-(-t,-t.n(-b.j4(-tt)kBU,at(7) (t))- rcp(fc;t)RBUcrt (8) С момента t начинают работать генератор 15 пилообразного напряжения и первый формирователь 16. В моменты начала каждой ПНЛЬЕ на выходе первого формирователя 16 вырабатываются импульсы сброса U (фиг.З). Импульс сброса Uj. поступает на второй вход первой линейной модели 3 и на управляющий вход первого ключа 10, в результате чего вектор состояния первой линейной модели 3 в момент to обращается в нуль Y(t;)0. Импульс сброса U{N открывает первьп) ключ 10, вектор состояния второй линейной модели 4 выравнивается с вектором состояния линейной части Y (tj. Поэтому из (6)-(8) следует (:){)/Ф(Ь,1:)к&(и (nUdt (9) r(iьjф(. to J J i lKbsi iUcft .ft))- .H,t) r - -IbolsignOdt; (t)f C)-j.)kissi v, Jctt, где ) П-Й элемент первой строки переходной рицы ср(.); -(Ш. Ч5() первые элементы век ров E(t) и Y(t) с ответственно. Сигнал e(t) у (t) поступают на первый и второй входы блока 7 деления. Выходной сигнал блока 7 деления равен Л .iM - (-t.-)u6()si9n Uoft%Ut j4H(-t.t)k:6sic3 Ddt Сигнал/л./ на выходе блока 13 выделения модуля сравнивается с пи образным напряжением в компараторе 14. Затем время (t, t) (фиг. 3 второй и третий ключ 19, 20 закрыты, четвертый ключ 21 открыт. Напр жение на выходе второго интегратора 25 в интервале (t, t) не изменяется и равно (Sol Поэтому амплитуда сигнала коррекции в этом интервале равна 1 . Так как величина полузоны люфта в интервале (tp, t) также постоянна, то выражение (13) для сигнала Я примет вид Л-lrHbl)J MMsi31iM (г. U4n(t. Если си , то чХ о, вто рой формирователь I7 вырабатывает пульс управления ключом 22. Таким образом, в интервале (t t) положительное опорное напряжение Uf подается на вход первого интег ратора 24 через открытые четвертый и пятый ключи 21, 22. Напряжение н выходе первого интегратора 24 воарастаетUitt l n-liufUonC t 1 J где К - коэ(}|фицие1П пропориионсшьности. В момент t , когда Ui, 1Я1 , напряжение U3,(t ) равно UjCt,) IZol + K,U(t,-t), (15) пилообразное напряжение равно U(t,)Kn(t,-t) |ZJ(16) где К,-, - коэффициент наклона пилы. Кц и Кр выбираются такими, что Кп KyUon ,(17) Поэтому, как видно из (15), (16) и (17) U(t) и„| + v - IZol (18) Как видно из (18), в момент t напряжение на выходе первого интегратора 24 равно истинной величине полузоны люфта Таким, образом, в интервале (t , tj) в устройстве производд1тся идентификация истинной величины полузоны люфт а VI . Если ,- , то Jy. с О, третий формирователь Т8 вырабатывает сигнал управления шестым ключом 23. Таким образом, в интервале времени (tg, t) в этом случае отрицательное опорное напряжение - Uon подается на вход первого интегратора 24 через открытые шестой и четвертый ключи 21, 23. Напряжение на выходе первого интегратора 24 уменьшается, U2(t) IZJ - Ки/и,п dt. К В момент ti это напряжение равно U3(t) iZol- .-tJ. (19) так }sак в момент t пилообразное напряжение равно (Di.| , а JL с О, то Из (14) следует Un((t,.1 tZJ -. (20) С учетом (17) выражение (19) дпя выходного напряжения первого интегратора 24 примет вид U3(t) lZo|-(|Zol-v).(21) Отсюда видно, как и в предыдущем случае, напряжение на выходе первого нтегратора 24 в момент t равно величине полузоны люфта k| . С момена t четвертый ключ 21 закрыт, наряжение на выходе первого интеграора 24 перестало изменяться и остатся постоянным и ранным . Идентифиация окончена. Как видно из (16), 71 (20) и (14), время идентификации (to, t) определяется и истинной раз ностью Я между величиной полузоны люфта и амплитудой сигнала коррекции. Отсюда следует, что при точной компенсации время идентификации равно нулю, т.е. идентификация не производится. С момента t, нормально открытые ключи 19, 20 открыты. На первый вход элемента 26 сравнения подается сигнал с выхода, первого интегратора 24 через второй ключ Т9, а на второй вход - сигнал с выхода второгс/ интегратора. 25 через третий ключ 20. Второй интегратор 25 отрабатывает сигнал отклонения у Ug - Uj, на выходе элемента 26 сравнения Ui(-t) 1Е,1 K, J art ,/(Vu2)cft -t Vi При этом выходном сигнал UQ второг интегратора 25 будет изменяться до тех пор, пока не станет равным Uj. Когда сигнал на выходе второго интегратора 23 равен сигналу на вы7ходе первого интегратора 24: 7 сигнал отклонения у на выходе элемента 26 сравнения равен нулю, изменение выходного сигнала второго интегратора 25 прекращается. Сигнал на выходе второго интегратора, представляющий собой амплитуду .сигнала коррекции, будет оставаться постоянным и равным величине полузоны люфта. Люфт точно компенсирован. Таким образом, с момента окончания идентификации t производится перестройка амплитуды сигнала коррекции до истинной величины полузоны люфт а. Если по какой-либо причине истинная величина полузоны люфта изменяется, то в устройстве снова производится идентификация, а затем перестройка. Предложенное устройство позволяет точно компенсировать люфт в случае, когда точно известна величина полузоны люфта, в случае когда эта величина априори неизвестна, а также в случае, когда она меняется в процессе работы.
to if t2
Фиг.З

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Устройство для определения амплитуднофазовых характеристик | 1977 |
|
SU664157A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| Следящая система | 1986 |
|
SU1352451A1 |

УСТРОЙСТВО Д11Я КОМПЕНСАЦИИ НЕЛИНЕЙНОСТИ ОБЪЕКТА ТИПА ЛЮФТ, содержащее поеладователъно соединенные первый сумматор, нелинейность типа люфт и линейную часть объекта, а также последовательно соединенные дифференциатор и релейный элемент, первый вход первого сумматора соединен с входом дифференциатора, а выход - с входом нелинейности типа люфт, отличающее с я тем, что, с целью повышения точности устройства, оно содержит первую модель и последовательно соединенные ключ, вторую модель, второй сумматор, делитель, блок автоматической подстройки и блок умножения, выход которого соединен с вторым входом первого сумматора, а второй вход - с выходом релейного элемента и через первую модель - с вторым входом делителя, первый вход ключа соединен с первым выходом линейной части объекта, а второй вход - с выходом блока автоматичес(Л кой подстройки и с вторым входом первой модели, второй вход второго с сумматора соединен с вторым выходом линейной части объекта, второй вход Q е второй модели соединен с входом дифференциатора и первым входом первого сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ компенсации люфта исполнительного устройства системы управления | 1977 |
|
SU767698A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ КОМПЕНСАЦИИ ЛЮФТА ИСПОЛНИТЕЛЬНОГОУСТРОЙСТВА | 0 |
|
SU243010A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
