Устройства, реализующие известные способы запоминания угловых перемещений, построены путем набора зафиксированных в заданном положении потенциометров, вращающихся трансформаторов и т. п.
В подобных устройствах общее число элементов превышает количество запоминаемых значений, что приводит к громоздкости системы.
Известные шаговые устройства запоминания угловых перемешений характеризуются трудно разрешимым противоречием между требованиями точности к скорости выборки.
В предлагаемом способе указанные недостатки устранены тем, что в качестве носителя информации применен магнитный барабан.
Для записи и считывания углового перемещения используют непосредственное совпадение отметок на поверхности барабана с положеппем чувствительного элемента датчика углового положения.
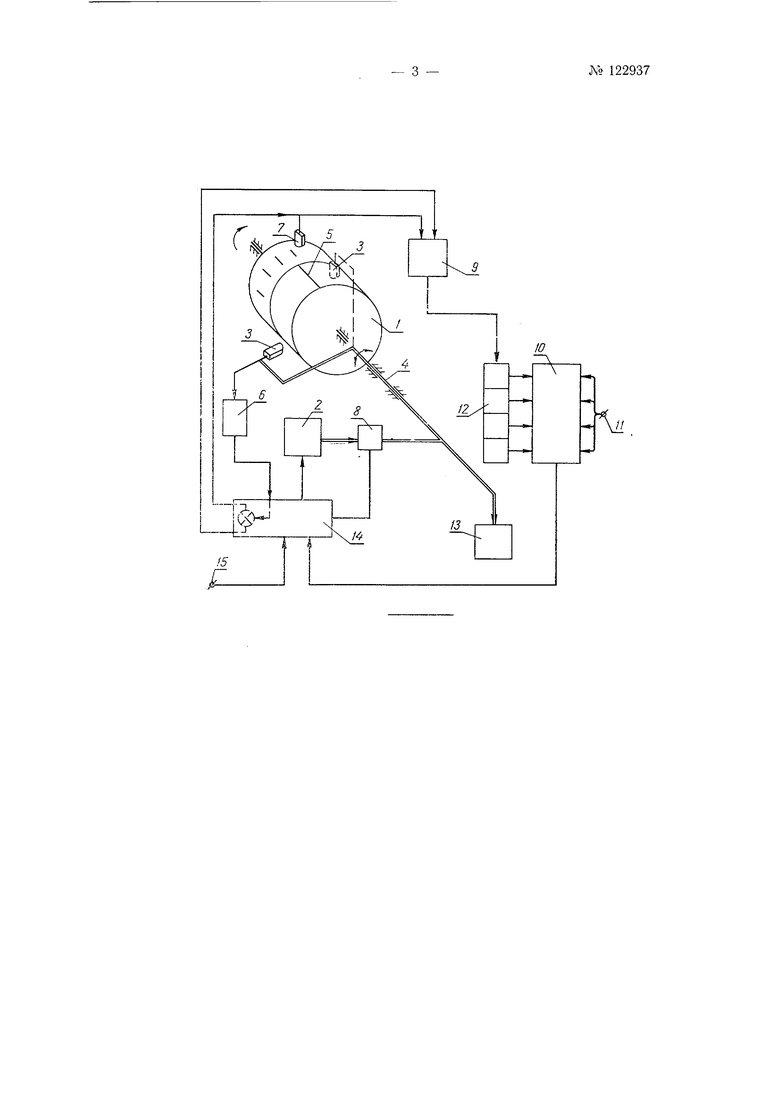
Сущность устройства поясняется чертежом, на котором изображена скелетная схема устройства по предлагаемому способу.
Магнитный барабан 1 вращается с постоянной скоростью мотором 2. Магнитная головка (чувствительный элемент) 3 разворачивается вместе с задающей осью 4 на величину запоминаемого угла. В момент прохождения под головкой 3 штриха 5 на поверхности магнитного барабана на выходе головки возникает э.д.с., которая усиливается усилителем 6. Усиленный импульс возбуждает головку 7, работающую в режиме записи. Таким образом, запоминаел1ая величина фиксируется на поверхности барабана положением элементарной зоны намагниченности относительно нулевого отсчетного штриха 5. Отсчет угла производится относительно диаметральной плоскости, проходящей через ось головки 7. Фиксация начального положения головки 3, соответствующего нулевому значению угла, выполняется стопорным устройством 8, которое включает ограничитель положения вала, несущего головку 3.
iaiomee устройство остальныхвеличин грунпы производитс5 а ал6гично в произвольном порядке. Отметки, соответствующие Е дй Ш№3МгШ Маемь1Л1 величинам, располагаются в порядке B03pacTaHiWj Mj 5iSi4 i i последних.
Счить1я1 ие записанных углов производится перемещением головки 3 концентрично окружности барабана от начального положения. Вращением магнитного барабана / обеспечивается непрерывная развертка введенных данных.
При считывании обе головки 5 и 7 работают в режиме воспроизведения. Момент одновременного возникновения импульсов считывания па головках 5 и 7 соответствует положению головки 3, при котором угол ее разворога составит величину, равную одному из запоминаемых значений- углов. Этот момент отмечается схемой совпадения 9.
Выбор необходимой отметки при считывании производится с помощью схемы совпадения 10, па которую с одной стороны через вход // подается код с адресной системы, а с другой стороны через счетчик 12- импульс, со схемы совпадения 9. При совпадении адресного кода и отметок, соответствующих искомому углу, на выходе схемы совпадения 10 возрп-1кает импульс, останавливающий головку 3. Величина воспроизведенного угла может быть получена С элеме)гга дистанциоппой связи 13.
При переходе к считывапию ;нового значения угла, значение которого зафиксировано в запоминающем устройстве, головка 3 с помощью мотора 2 и стопорного устройства 8 возвращается в исходное состояние.
Управление работой устройства нроисходит с помощью блока М, куда поступают со входа 15 сигналы управления, а с выхода схемы совпадения 10-сигнал останова.
Предмет изобретения
Способ запоминания угловых пере.мещений длинами дуг поверхности магнитного барабана, от л и ч а ю щи и с я тем, что для записи и измерения (считывания) величины угла используют непосредственное совпадение отметок на поверхности барабаиа-носителя информапии с нололсеннел чувствительного элемента (головки считывания) датчика УГЛОВОГО положения.