При использовании цифровой управляющей машины в системах автоматического управления и коитрбля необходимо периодически «информировать машииу о положении рабочих органов объекта. В связи с этим, данные высокой точности в большинстве случаев должны поступать в форме двоичного цифрового кода.
Для решения этой задачи в настоящее время известны датчики, действие которых основано на селекции числа, соответствуюш,его угловому перемещению, из ряда чисел, записанных двоичным кодом па приводимом во вращение магнитном барабане датчика.
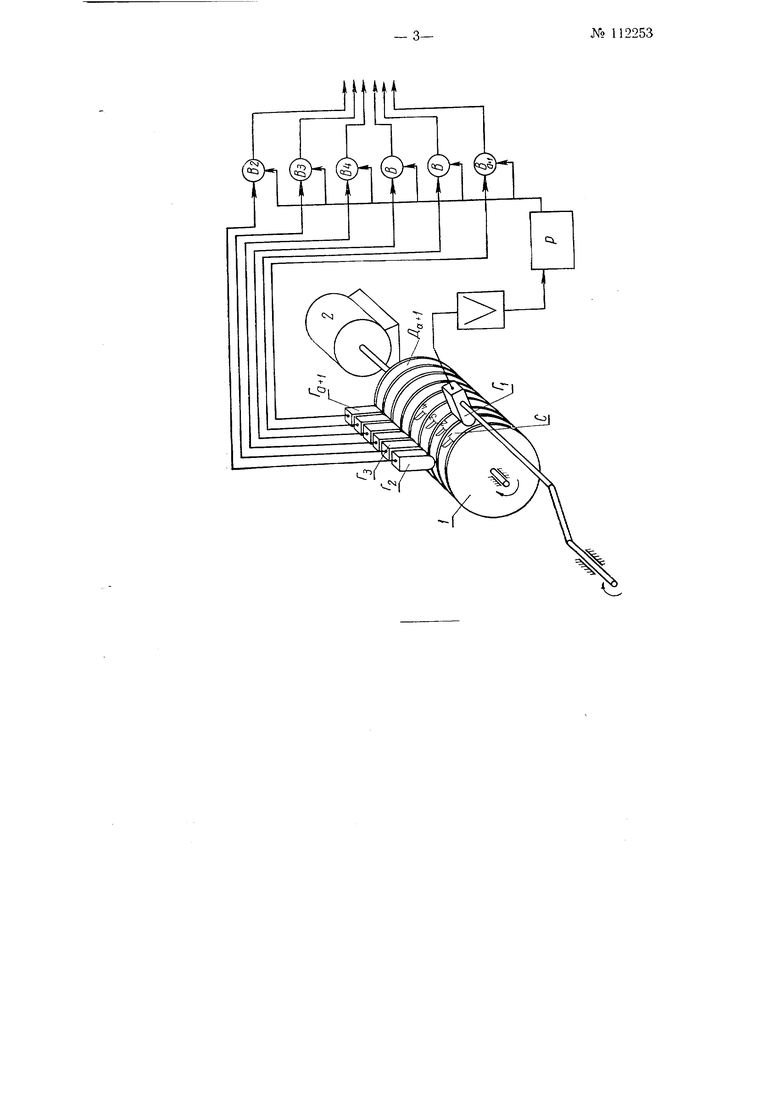
Ос обенность описываемого датчика заключается в применении подвижной считывающей магнитной головки, связанной с задающей осью датчика. Это обеспечивает селекцию требуемых чисел при высоких скоростях изменения угловых перемещенийНа чертеже изображена принципиальная схема датчика, устроенного следующим образом.
На боковой поверхности магнитного барабана 1 размещены а+1 дорожки магнитной записи (а -принятое чи;:ло разрядов числа, выражающего максимальное значение входной переменной). На а-дорожках (от Да до Дд + , в виде элементарных участков с насыщенным состоянием магнитной поверхности записаны коды чисел от нуля до А, где Л соответствует максимальному значению входной переменной (или заданной функции при этом значении переменной).
Код каждого числа располагается по одной образующей барабана. Полное количество кодов, записанных через равные промежутки, определяется диаметром барабана, а также плотностью записи, и характеризует точность датчика.
На дорожке Д на одной образующей с кодом «нуля расположен участок С насыщения, играющий основную роль при селекции числа, записанного на цифровой части барабана и выражающего текущее значение входной переменной.
№ 112253- 2 -
Читающие головки от-А до связаны с корпусом датчика и неподвижны.
Читающая головка FI жестко связана с задающей осью, поэтому положение головки относительно остальных характеризует угловое перемещение задающей оси.
Начальному положению задающей оси отвечает расположение головки Г| в .один ряд с остальными.
При отклонении задающей оси от начального положения в момент нахождения участка С на дорожке Д: под головкой Л, под неподвижными головками окажет;ся образующая барабана с записью кода числа, выражающего отклонение задающей оси (или функции этого отклонения).
Работа датчика протекает в следующей последовательности.
Барабан / приводится во вращение с постоянной скоростью двигателем 2.
В момент прохождения участка С под головкой Г, в последней возникает импульс напряжения, запускающий через усилительный элемент релаксационное реле с одиним устойчивым положением.
Высокое напряжение с выхода релаксационного реле Р открывает вентили Вч-5д 1 на время, достаточное для выдачи кода избранного
числа на выходные шины.
Предмет изобретения
Датчик угловых перемещений, действие которого основано на селекции числа, соответствующего заданному угловому перемещению, из ряда чисел, записанных на приводимом во вращение магнитном барабане датчика двоичным кодом, считываемым посредством неподвижно установленных магнитных головок, отличающийся тем, что, с целью обеспечения (Селекции требуемых чисел при высоких скоростях изменения угловых перемещений, он снабжен подвижной относительно поверх,.ности магнитного барабана магнитной считывающей головкой, связанной с задающей осью датчика.