Известны устройства для члроведения исследований динамической устойчивости вертолета.
Недостатки известных устройств заключаются в том, что они не дают строго определенной величины начальных возмущений относительно балансяого положения, а также различных перемещений ручки унравления в заданном направлении.
Сущность изобретения заключается в том, что, с целью фиксации ручки управления автомата-перекоса в любом балансном положении, он состоит из двух стержневых элементов с шаровыми опорами, подвижно закрепляемыми на смежных взаимно перпендикулярных стенках кабины, причем один из стержневых элементов для изменения начальной длины выполнен составным по телескопической схеме сочленения и несет на себе зажим, фиксирующий точку пересечения стержней над ручкой управления. С целью получения строго определенной величины чальных возмущений относительно балансного положения ручки управления, а также различных ее перемещений в заданном направлении, составной стержневой элемент снабжен силовой пружиной, смонтированной в цилиндрическом корпусе и ограниченной переставными упорами.
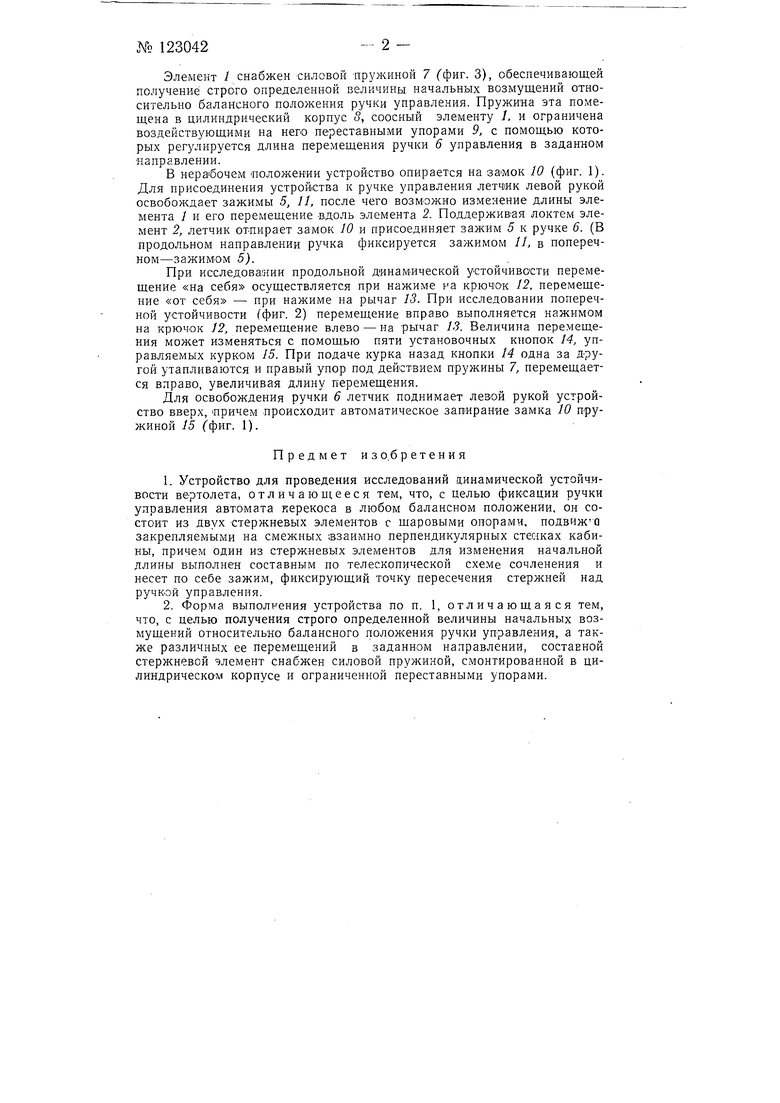
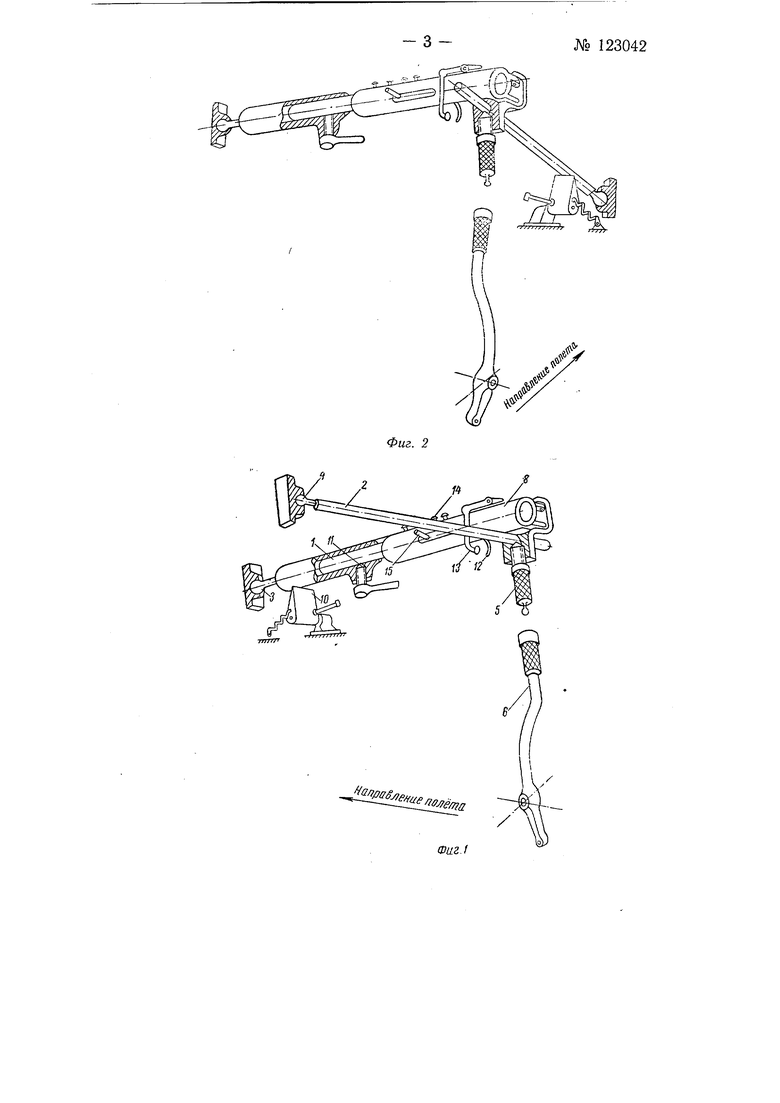
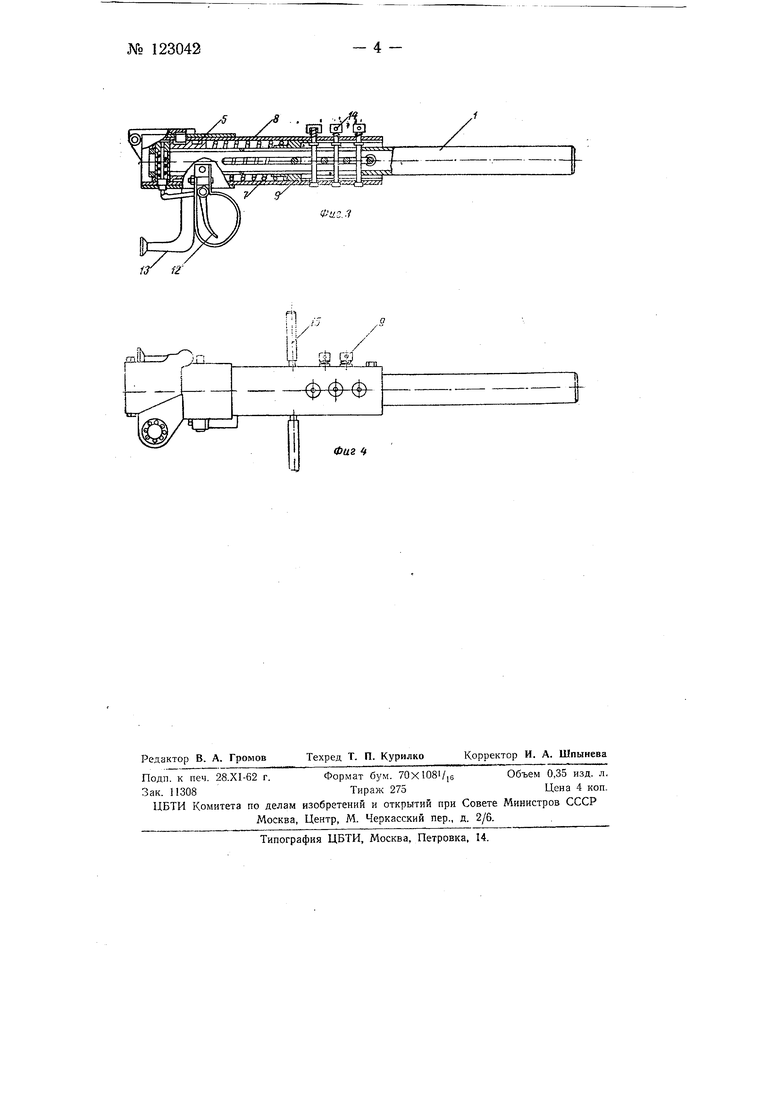
На фиг. 1 показана схема устройства, настроенного для выполнения продольных перемещений; на фиг, 2 - схема того же устройства, настроенного для выполнения поперечных перемещений; на фиг. 3 - составной стержневой элемент устройства в продольном разрезе; на фиг. 4 -тот же элемент в плане.
Устройство состоит из двух стержневых элементов / и 2 (фиг. 1), снабженных шаровыми опорами 3 и 4, подвижно закрепленными на смежных взаимно перпендикулярных стенках кабииы вертолета. Элемент / выполнен составным, что позволяет изменять его длину. К нему присоединен зажим 5, фиксирующий точку пересечения.стержневых элементов I/, 2 над ручкой 6 управления автоматом-перекосом.
М 123042- 2 -
Элемент / снабжен силовой пружиной 7 (фиг. 3), обеспечивающей получение строго определенной величины начальных возмущений относительно балансного положения ручки управления. Пружина эта помещена в цилиндрический корпус 5, соосный элементу /, и ограничена воздействующими на него переставными упорами 9, с помощью которых регулируется длина перемещения ручки 6 управления в заданном направлении.
В нерабочем положении устройство опирается на замок 10 (фиг. 1). Для присоединения устройства к ручке управления летчик левой рукой освобол дает зажимы 5, 11, после чего возможно изменение длины элемента 1 и его перемещение вдоль элемента 2. Поддержив ая локтем элемент 2, летчик отпирает замок 10 и присоединяет зажим 5 к ручке 6. (В продольном направлении ручка фиксируется зажимом 11, в поперечном-зажимом 5).
При исследовании продольной динамической устойчивости перемещение «на себя осуществляется при нажиме на крючок 12, перемещение «от себя - при нажиме на рычаг 13. При исследовании поперечной устойчивости (фиг. 2) перемещение вправо выполняется нажимом на крючок 12, перемещение влево - на рычаг 13. Величина перемещения может изменяться с помощ ью пяти установочных кнопок 14, управляемых курком 15. При подаче курка назад кнопки 14 одна за другой утапливаются и правый упор под действием пружины 7, перемещается вправо, увеличивая длину перемещения.
Для освобождения ручки 6 летчик поднимает леаой рукой устройство вверх, Причем происходит автоматическое запирание замка Ю пружиной 15 (фиг. 1).
Предмет изо.бретения
1.Устройство для проведения исследований динамической устойчивости вертолета, отличаю И1.ееся тем, что, с целью фиксации ручки управления автомата керекоса в любом балансном положении, он состоит из двух стержневых элементов с щаровыми опорами, подвижно закрепляемыми на смежных взаимно нерпендикулярных стенках кабины, причем один из стерж«евых элементов для изменения начальной длины выполнен составным по телескопической схеме сочленения и несет по себе зажим, фиксирующий точку пересечения стержней над ручкой управления.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что, с целью получения строго определенной величины начальных возмущений относительно балансного положения ручки управления, а также различных ее перемещений в заданном направлении, составной стержневой элемент снабжен силовой пружиной, смонтированной в цилиндрическОМ корпусе и ограниченной переставными упорами.
Фиг. I
Ш Ш
Фиг
ij
