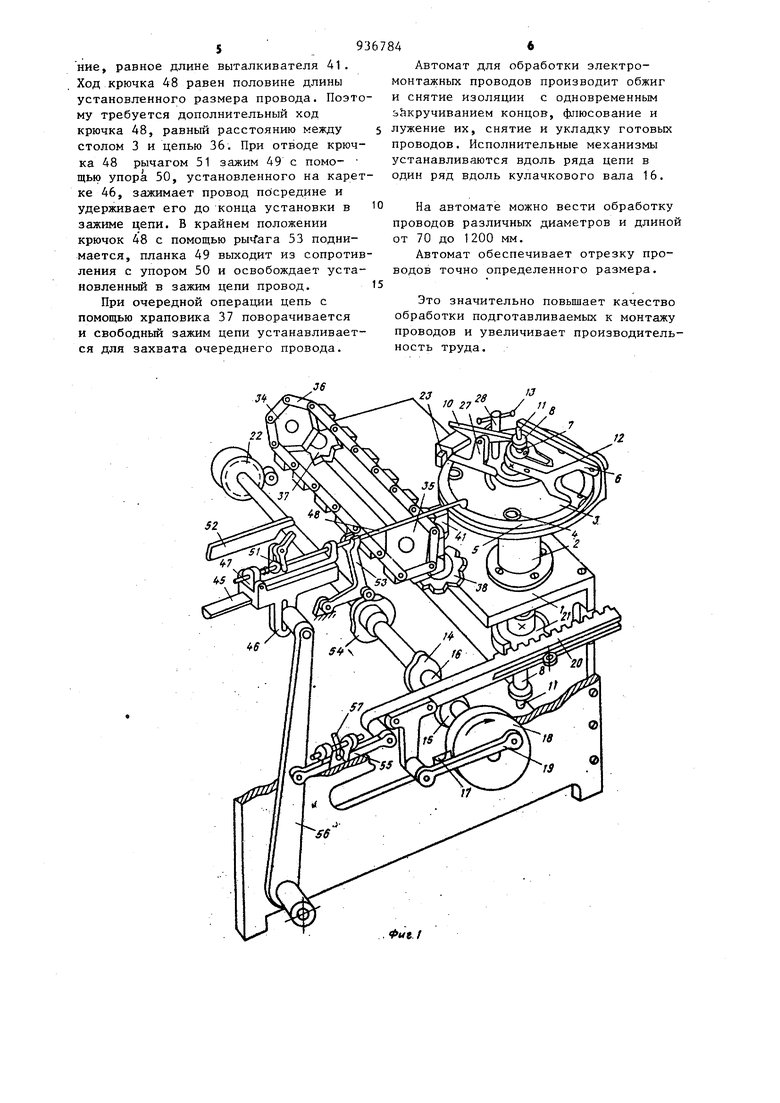
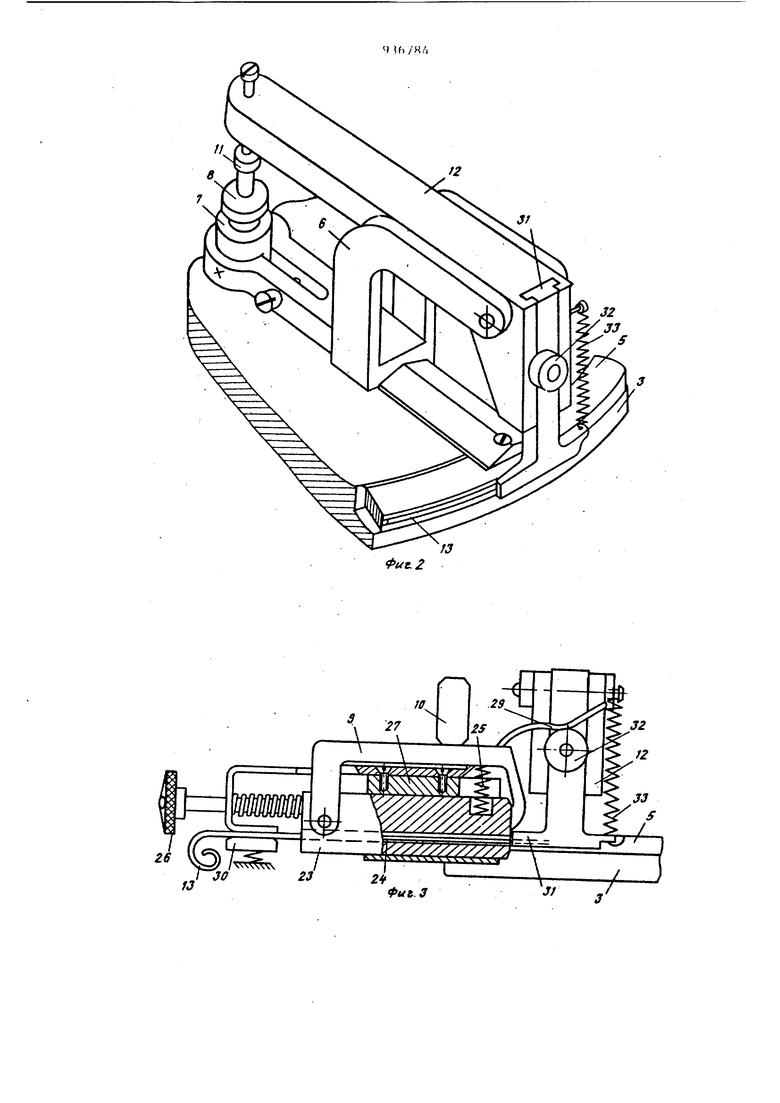
Изобретение относится к технологи ческому оборудованию для обработки электромонтажных проводов и может быть использовано в электротехнической промышленности. Известен автомат, содержащий механизм подачи провода, механизм отмера и отрезки провода, механизм обжига и снятия изоляции. Однако известное устройство не обеспечивает качественной обработки проводов, так как такая конструкция не позволяет осуществлять снятие изоляции равномерно по всей длине. Известен автомат для мерной резки провода, зачистки и лужения его концов, содержащий механизм для отмера и отрезки провода, выполненный в виде подвижного стола и поворо .ного рычага, установленного соосно со столом, механизм для захвата провода выполненный в виде крючка с приводом возвратно-поступательного перемещени установленного на каретке, транспортирующее устройство, несущие зажимы для провода и привод. Последнее из указанных устройств является наиболее близким к предлага емому по технической сущности и дост гаемому результату. Однако недостатком этого автомата является недостаточно высокое качест во обработанных проводов. Этот автомат раскладывает провод вдоль роликов, отмеряет, отрезает и устанавливает его, сложенным в виде скобы, в зажимы транспортирующего ротора, затем обрабатывает концы. Клиновой зажим, протягивает и раскладьшает провод вдоль роликов, в результате провод оказывается натянутым по ломано линии и прижатым к роликам, отчего снимается изоляция. В момент отреза провода и снятия его крючком для установа в зажимы транспортирующего ротора происходит продергивание провода, в результате чего он складывае ся в скобу с концами разной длины. Целью предлагаемого изобретения является повьшение качества обработк проводов. Поставленная цель достигается тем, что автомат содержит выталкиватель с приводом его возвратно-поступательного перемещения, рабочая поверхность.которого выполнена с кли новыми выступами, установленный межд механизмом для отмера и отрезки провода и механизмом для захвата провода, механизм для отмера и отрезки провода содержит кольцо, закрепленное на рычаге, установленное соосно со столом и контактирующее с выталкивателем, а устройство для захвата провода содержит механизм для зажима провода, выполненный в виде подпружиненной планки, установленной подвижно вдоль крючка, причем каретка снабжена упором, контактирующим с планкой.На фиг. 1 изображен автомат, общий вид; на фиг. 2 - поворотный рычаг с кольцом и рычажным зажимом; на фиг. 3 - устройство отрезных плавающих ножей; на фиг. 4 - звено транспортирующей цепи с установленным на нем зажимом для фиксации провода; на фиг. 5 и 6-зажим, установленный на транспортирующей цепи в разрезе . Автомат для обработки электромонтажных проводов состоит из основания 1, на котором установлена подшипниковая втулка 2, в верхней части которой неподвижно закреплен круглый стол 3, в углублениях которого размещены ролики 4, по которым свободно вращается кольцо 5, которое, в свою очередь, жестко соединено с поворотным рычагом 6, плотно посаженным на пустотелой оси 7, в которой размещены пустотелый толкатель 8 OTpeiBHoro ножа 9 (см. фиг. 3). Нож приводится толкателем через рычаг 10. Внутри толкателя 8 размещен стержневой толкатель 11, с помощью которого через прижимной рычаг 12 осуществляется захват раскладываемого провода 13. Привод толкателей 8 и 11 осуществляется от кулачков 14 и 15, закрепленных на кулачковом валу 16. Привод поворотного рычага 6 с кольцом 5 осуществляется с помощью регулируемого винтом 17 эксцентрика 18 через тягу 19, рейку 20 и шестерню 21, жестко закрепленную на пустотелой оси 7. Привод кулачкового вала осуществляется от шестеренчатого редуктора 22. Отрезной нож 9 размещен на суппорте 23 (см. фиг. 3), который имеет отверстие 24 для прохода провода 13 и возвратную пружину 25 ножа 9. Суппорт 23 с регулировочным винтом 26 размещается в пазу поворотного держателя 27, который после установки необходимого размера закрепляется на круглом столе3 с помощью зажима 28, На держателе 27 закреплен копир 29, он же является упором регулировочного винта 26 и прижимом 30 провода.
В Т-образном пазу рычага 12 размещается подвижный прижим 31 с роликом 32 и возвратной пружиной 33.
Механизм переноса нарезанного провода на операции обработки концов размещается на основании 1 и содержит цепной транспортер, состоящий из шестигранников 34 и 35, соединенньк между собой звеньями цепи 36. На оси шестигранника 34 жестко закреп-ts
лен храповик 37, который служит приводом цепи. Привод осуществляется от кулачкового вала 16. На оси шестигранника 35 имеется ;звездочка 38, которая выполняет роль фиксатора цепи во время остановки.
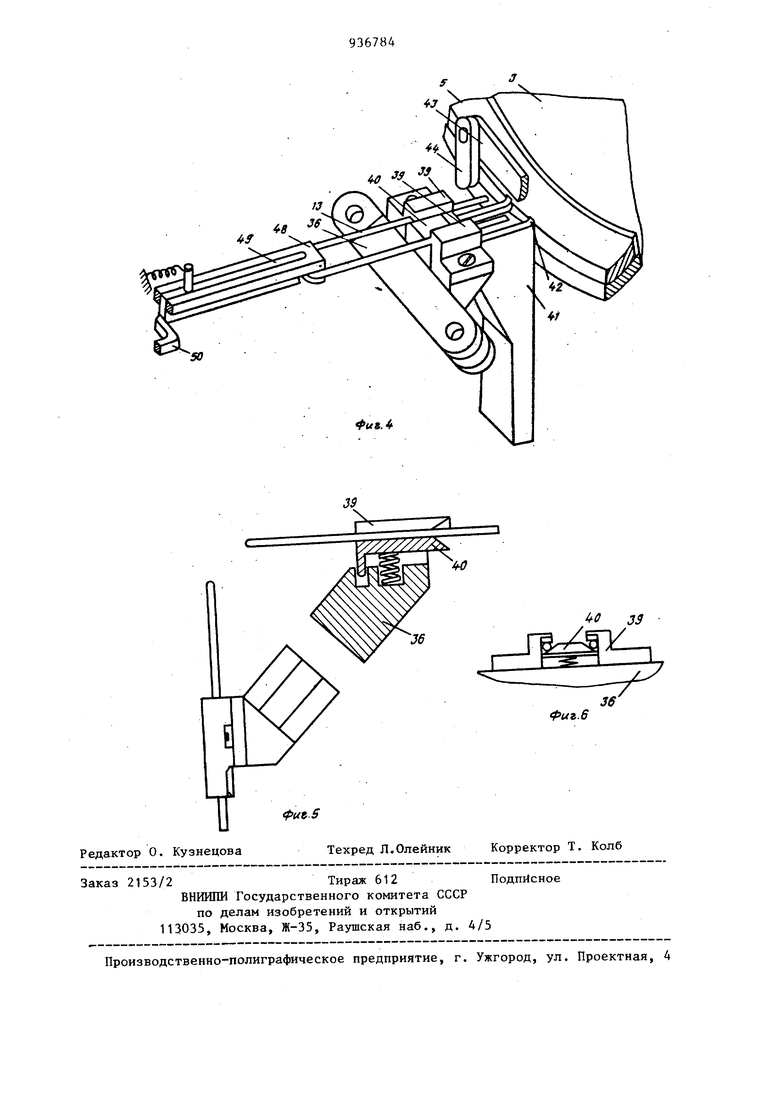
На звеньях цепи 36 установлены зажимы провода, неподвижные 39 и подпружиненные 40. Между столом 3 и цепью 36 установлен подвижный выталкиватель 41 с клиновыми выступами 42 (см. фиг. 4).
На рычаге 43 установлен сухарь 44 который в момент установки провода в зажимы цепи опускается на выталкиватель 41 и не дает концам провода выскочить из зажимов 39 и 40.
Устройство для захвата провода состоит из направляющей 45, закрепленой на основании 1, каретки 46, на которой размещена скоба 47 с крючком 48 (см. фиг. 4).
Крючок 48 установлен в скобе 47 с возможностьк) продольного перемещения и содержит зажим для провода, выполненный в виде подпружиненной планки 49, установленной подвижно вдоль крючка, и упора 50, закрепленного на каретке 46.
На каретке 46 также установлен рычаг 51, который взаимодействует с копиром 52, закрепленном на основании 1 станка. Рычаг 53, который периодически поднимает крючок 48, приводится от кулачка 54. Привод механизма захвата провода осуществляется от рейки 20 через тягу 55 и делительный рычаг 56. Тяга 55 имеет регулировочный винт 57.
Автомат работает следующим образом. Перед началом работы с помощью регулировочного винта 18 устанавливается размер отрезаемых проводов. Для этого на кольце 5 имеется стрел936784
а на столе 3 - шкала, с помощью
ка,
которых и устанавливается длина отрезаемого провода. Поворотный рычаг 6 перемещается в крайнее положение по часовой стрелке. Поворотный держатель 27 отрезных ножей подается до упора с рычагом 6 и закрепляется зажимом 28. Затем поворотный рычаг 6 переводится в мертвую точку противоположного направления, крючок 48 с помощью винта 57 устанавливается над кольцом 5 в нужной точке. Провод 13 установлен в отверстии 24 суппорта 23 и проходит через прижим 30.
ния привода поворотный рычаг 6 идет по направлению к держателю 27. Подвижный прижим 31 пружиной 33 удерживается в верхнем положении. Поворотный рычаг 6, подходя к отрезному
0 суппорту 23, прижимом 31 отталкивает суппорт в крайнее положение, прижим 31, входя во взаимодействие с копиром 29, опускается и прижим 31 с помощью толкателя 11 и рычага 12 при5жимает к кольцу 5 часть вышедшего из отверстия суппорта 23 провода 13. Прижим 30 в это время удерживает провод в заданном положении. При движении поворотного рычага в обратном
0 направлении провод раскладывается вокруг кольца 5, суппорт 23 возвратной пружиной устанавливается в исходном положении, рычаг 53 поднимает крючок 48, который движется по нап5равлению к кольцу 5. Придя в крайнюю точку, поворотный рычаг еще удерживает вытянутый провод, крючок 48 проходит в крайнюю то.чку и опускается. В это время- выталкиватель 41
0 поднимается, выступами 42 снимает провод с кольца и прижимает его к крючку 48. Толкатель 8 через рычаг 10 нажимает на нож 9 и отрезает провод, а толкатель 11, уходя вниз, отпускает
5 зажатый конец провода. Прижим 31, освобождаясь, поднимается пружиной 33 вверх. Это нужно для того, чтобы при движении в направлении для захвата очередного провода прижим 31 не
0 соприкасался с устанавливаемым проводом. Теперь, когда поворотный рычаг начинает двигаться в обратном направлении, крючок 48 начинает двигаться назад и устанавливать провод в 5 зажимы транспрртирующей цепи. В это время рычаг 51, входя в соприкосновение с копиром 52, отводит крючок 48 по отношению к каретке 46 на расстояАвтомат готов к работе. После включение, равное длине выталкивателя 41 . Ход крючка 48 равен половине длины установленного размера провода. Поэт му требуется дополнительный ход крючка 48, равный расстоянию между столом 3 и цепью 36. При отводе крюч ка 48 рычагом 51 зажим 49 с помощью упора 50, установленного на каре ке 46, зажимает провод посредине и удерживает его до конца установки в зажиме цепи. В крайнем положении крючок 48 с помощью 53 поднимается, планка 49 выходит из сопроти ления с упором 50 и освобождает уста новленный в зажим цепи провод. При очередной операции цепь с помощью храповика 37 поворачивается и свободный зажим цепи устанавливает ся для захвата очереднего провода. Автомат для обработки электромонтажных проводов производит обжиг и снятие изоляции с одновременным з&кручиванием концов, флюсование и лужение их, снятие и укладку готовых проводов. Исполнительные механизмы устанавливаются вдоль ряда цепи в один ряд вдоль кулачкового вала 16. На автомате можно вести обработку проводов различных диаметров и длиной от 70 до 1200 мм. Автомат обеспечивает отрезку проводов точно определенного размера. Это значительно повьшает качество обработки подготавливаемых к монтажу проводов и увеличивает производительность труда.
f2
31
32
33
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для обработки электромонтажных проводов | 1990 |
|
SU1837371A1 |
| ЙСЕСОЮЗНАЯ ^^^шт-1штт/^ | 1973 |
|
SU389592A1 |
| Многошпиндельный токарный автомат | 1979 |
|
SU1040696A1 |
| Автомат для обработки электромонтажных проводов | 1984 |
|
SU1292089A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ДЛИННОМЕРНОГО МАТЕРИАЛАВСЕСОЮЗНАЯ11Я?|1Т§10-ТЕХНН'{?01! | 1972 |
|
SU332902A1 |
| АВТОМАТ ДЛЯ КРЕСТОВОЙ НАМОТКИ ШВЕЙНЬГХ НИТОК НА ЦИЛИНДРИЧЕСКИЕ ГИЛЬЗЫ | 1969 |
|
SU234904A1 |
| Устройство для мерной резки и подготовки проводов к монтажу | 1974 |
|
SU572869A1 |
| Автомат для перемотки пряжи и ниток в мотки | 1957 |
|
SU115224A1 |
| Станок-автомат для изготовления примусных иголок | 1961 |
|
SU148001A1 |
| Машина для складывания и отмеривания тканей | 1930 |
|
SU38104A1 |
АВТОМАТ ДЛЯ ОБРАБОТКИ ЭЛЕКТРОМОНТАЖНЫХ ПРОВОДОВ, содержащий механизм для отмера и отрезки прово, да, выполненный в виде неподвижного стола и поворотного рычага, установленного соосно со столом, механизм для захвата провода, вьтолненный в виде крючка с приводом возвратно-поступательного перемещения, установленного на каретке, транспортирующее устройство, несущие зажимы для прово с%й .;:да и привод, отличающийся тем, что, с целью повьпиения качества обработки проводов, автомат содержит выталкиватель с приводом его возвратно-поступательного перемещенкя, рабочая поверхность которого выполнена с клиновыми выступами, установленный между механизмом для отмера и отрезки провода и механизмом для захвата провода, механизм для отмера и отрезки провода содержит кольцо, закрепленное на рычаге, установленное соосно со столом и контактирующее с выталкивателем, а устройство для захвата провода содержит механизм i для зажима провода, выполненный в (Л виде подпружиненной планки, установленной подвижно вдоль крючка, причем каретка снабжена упором, контактирующим с планкой. :о оо О5 00 Oiib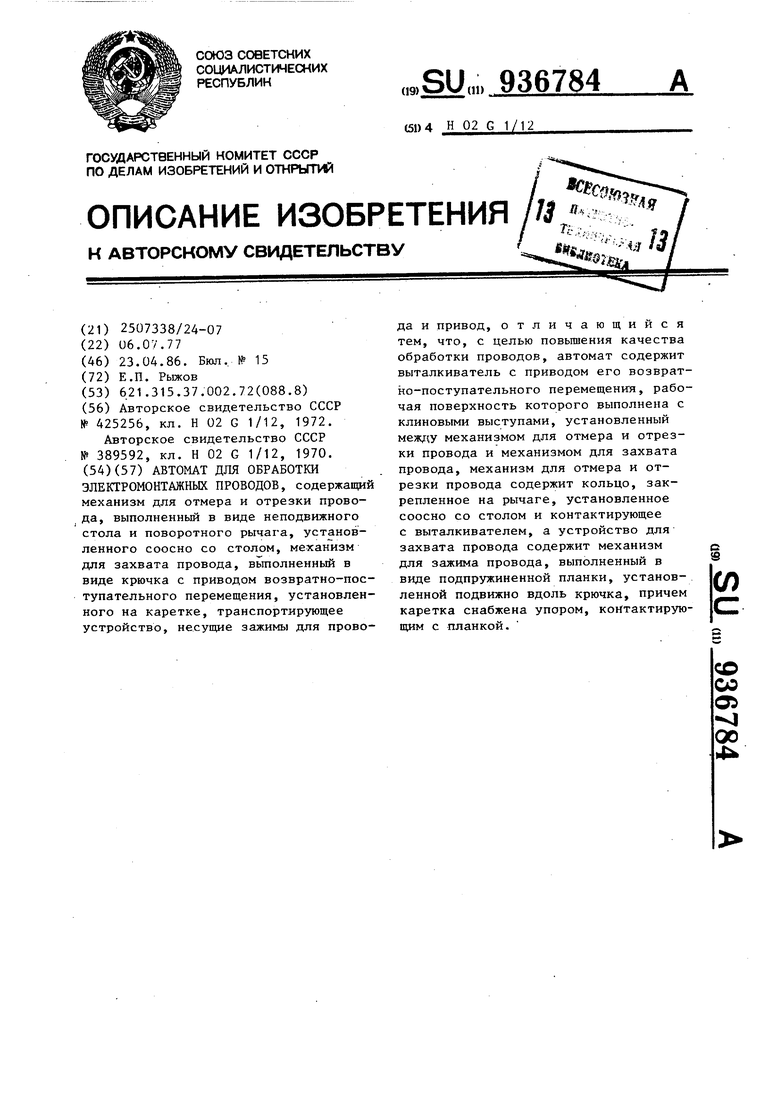
| АВТОМАТ ДЛЯ МЕРНОЙ РЕЗКИ, ЗАЧИСТКИ ОТ ИЗОЛЯЦИИ, ЗАКРУЧИВАНИЯ ЖИЛ И ЛУЖЕНИЯ КОНЦОВ МОНТАЖНЫХПРОВОДОВ | 1969 |
|
SU425256A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЙСЕСОЮЗНАЯ ^^^шт-1штт/^ | 0 |
|
SU389592A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
