2.Аппарат по п. 1,отлича- ю щ и и с я тем, что длина лопастей периодически увеличивается на величину А .
3.Аппарат по п. 1,отлич а- ю щ и и с я тем, что длина лопастей периодически уменьшается на величину Af .
4.Аппарат по п. 1, отличающийся тем, что длина лопастей периодически увеличивается, а затем уменьшается на величину д( .
5.Аппарат по п. 1,отлича- ю щ и и с я тем, что длина лопастей периодически изменяется на величину
8e u8 sinx,
где &t - постоянная величина изменения длины лопастей , X - произвольная переменная величина.
6.Аппарат по п. 1, о т л и ч а- ю щ,и и с я тем, что лопатки статора имеют периодически изменяющуюся длину.
7.Аппарат попп. 1и6, отл и- чающийся тем, что длина лопаток периодически увеличивается на величину л t
Изобретение относится К смесительной технике и может быть использован в химической промьшшенностн для проведения процессов диспергирования, гомогениз ации, перемешивания и т .д. в жидкотекучих средах, в частности при производстве фотографических мате риалов.
Целью изобретения является интен- си4в1кация процессов диспергирования и перемешивания многокомпонентных систем за счет создания широ- крполосно о акустического поля.
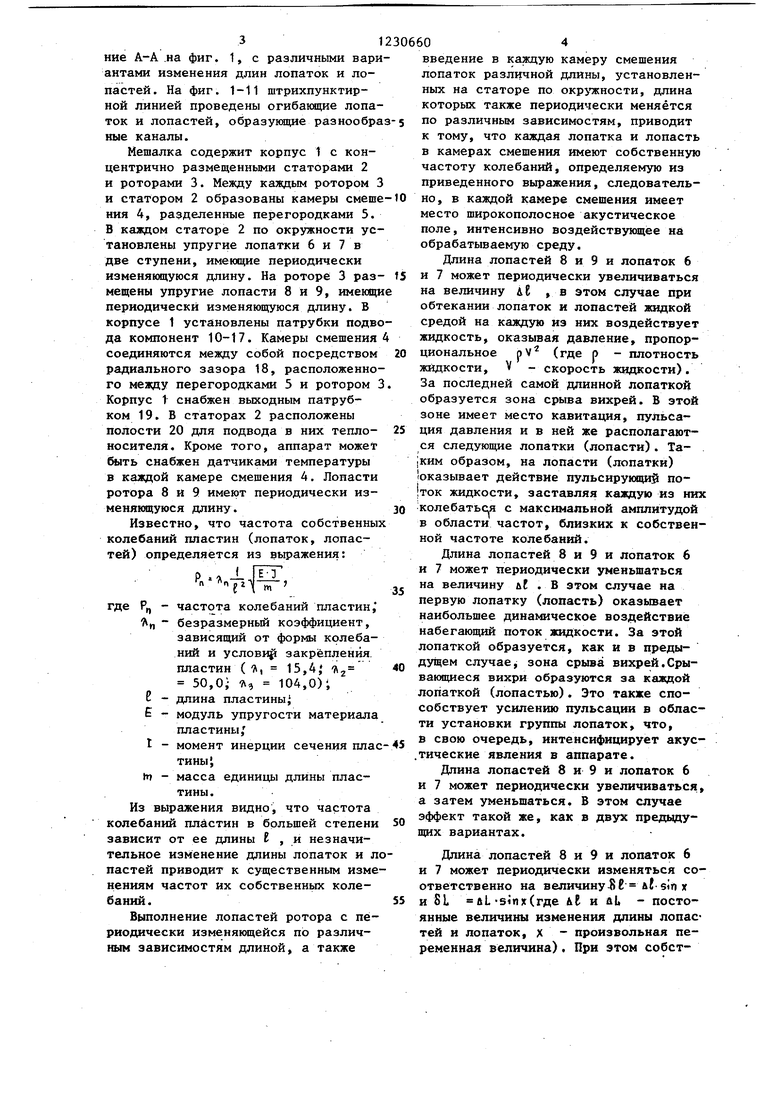
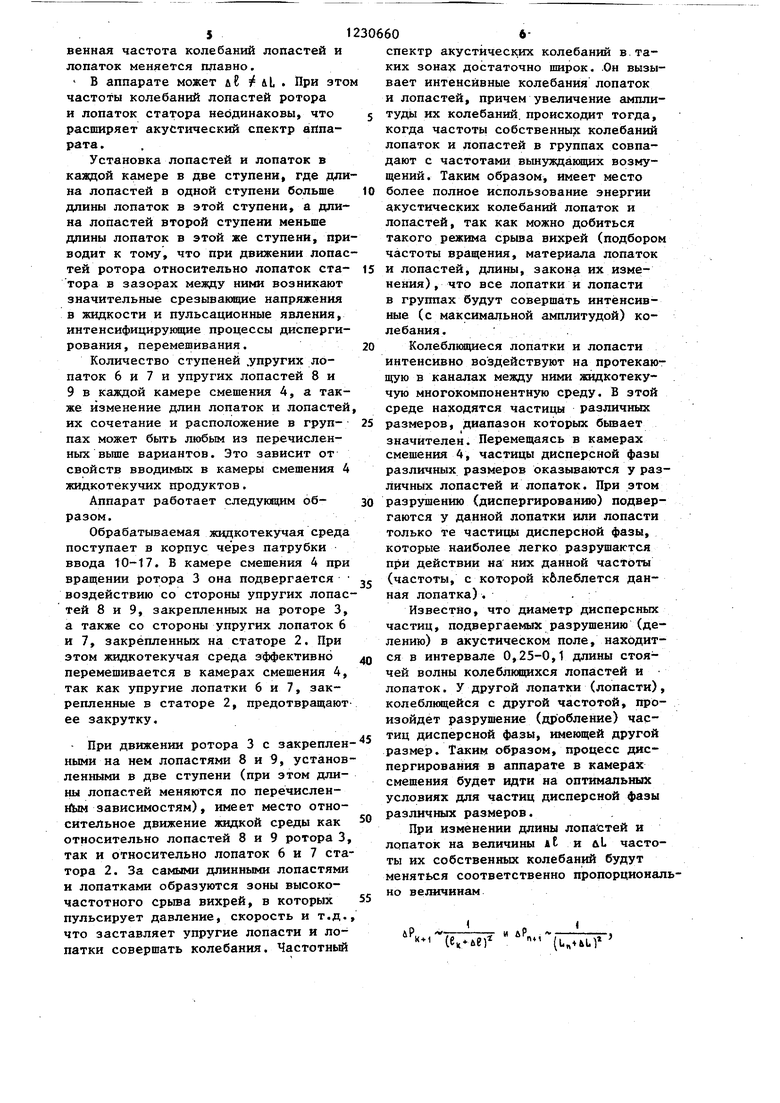
На фиг. 1 избражена мешалка, продольный разрез: (стрелками показано направление вращения ротора, направление движения обрабатываемой жидкой среды)iна фиг.2 - сечение А-А на фиг. 1, вариант с увеличивающейся на величину длиной лопастей i на фиг. 3 - то же, вариант с уменьшаю8.Аппарат по рп. 1 и 6,.о т л и- чающийся тем, что длина лопаток периодически уменьшается на величину д L .
9.Аппарат по пп. 1 и 6, отличающий с я тем, что длина лопаток периодически увеличивается, а затем уменьшается на величину л L .
10.Аппарат по пп. 1 и 6, отличающийся тем, что длина лопаток периодически изменяется на величину
,-Sinx,
где uL - постоянная величина изменения длины лопаток.
11.Аппа| ат по пп. 1, 6 и 9, о т- личающийся тем, что д э
Hi .... 12.Аппарат по пп. 1, 6 и 9 о т- личающийся тем, что лопасти ротора и лопатки статора установлены в две ступени, при этом длина лопастей ротора в одной ступени больше длины лопаток статора той же ступени, а дпина лопастей ротора в другой ступени меньше длины льпаток статора той же ступени.
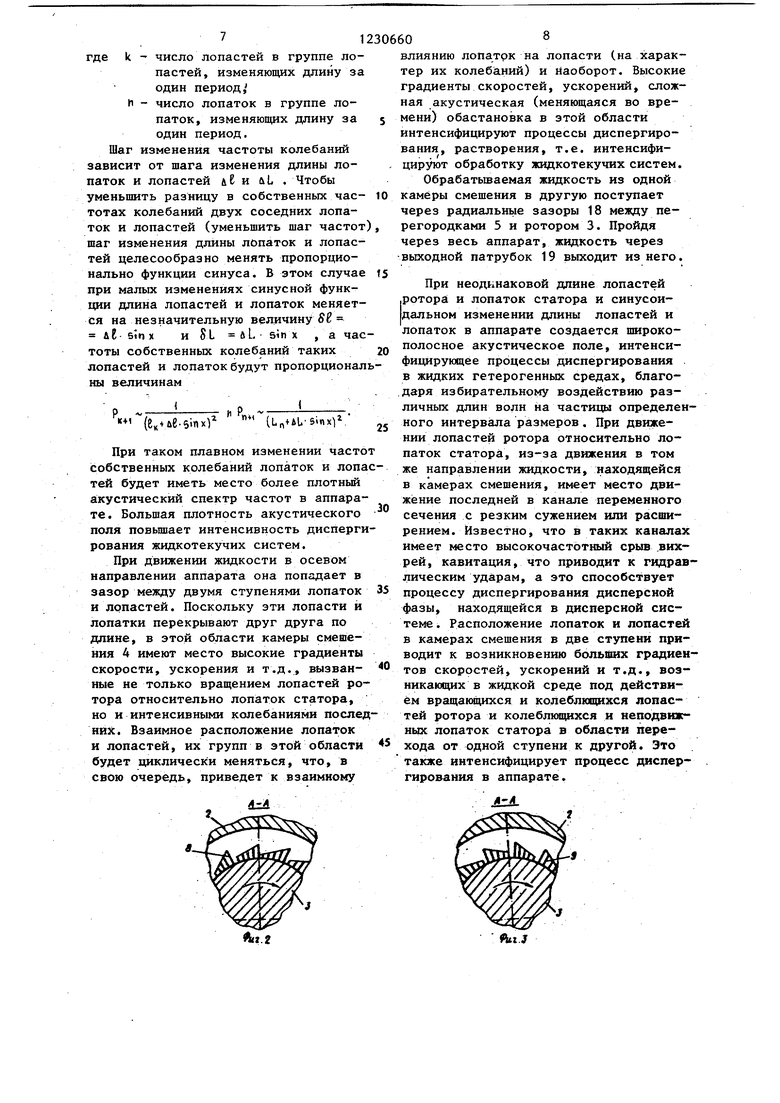
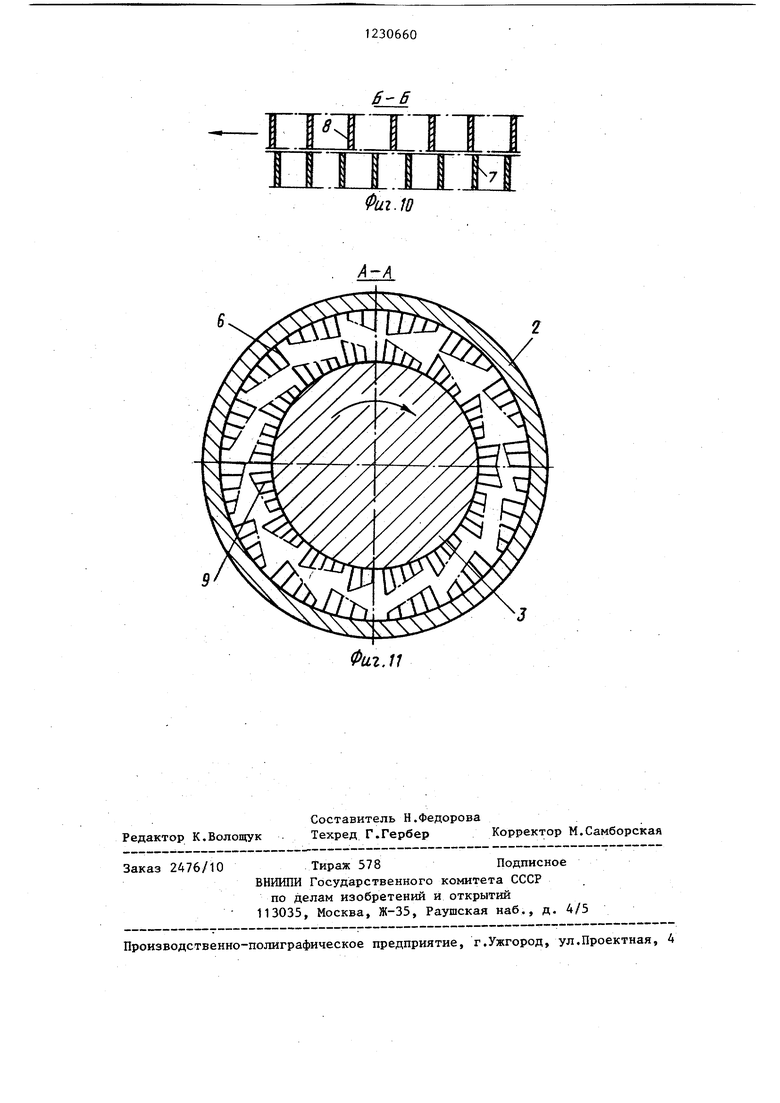
щейся на величину kt длиной лопастей} на (|И1Г. 4 - вариант с увеличи- вающейся и уменьшающейся на величину д длиной лопастейJ на фиг. 5 - вариант с изменяющейся на величину 8 &6 Sinx i на фиг. 6 - вариант с увеличивающейся на величину AL длиной лопаток статораi на фиг. 7 - вариант с уменьшающейся на величину &L длиной лопаток статора на фиг. 8 - вариант с увеличивающейся и уменьшающейся на величину L длиной лопаток статора, на фиг. 9 - вариант с длиной лопаток, измёнякщейся на величину 81 « iL-Stn х ; .Ю сечение Б-Б на фиг. 1, вариант с расположением лопастей и лопаток в две ступени, при этом лопасти одной ступени длиннее лопаток другой ступени (стрелкой показано направление вращения ротора); на фиг. 11 - сечение А-А .на фиг. 1, с различными вариантами изменения длин лопаток и лопастей. На фиг. 1-11 штрихпунктир- ной линией проведены огибающие лопаток и лопастей, образуклдие разнообраз ные каналы.
Мешалка содержит корпус 1 с кон- центрично размещенными статорами 2 и роторами 3. Между каждым ротором 3 и статором 2 образованы камеры смещения 4, разделенные перегородками 5. В каждом статоре 2 по окружности установлены упругие лопатки 6 и 7 в две ступени, имеющие периодически изменяющуюся длину. На роторе 3 раз- мещены упругие лопасти 8 и 9, имеющие периодически изменяющуюся длину. В корпусе 1 установлены патрубки подвода компонент 10-17. Камеры смещения 4 соединяются между собой посредством радиального зазора 18, расположенного между перегородками 5 и ротором 3 Корпус 1 снабжен выходным патрубком 19. В статорах 2 расположены полости 20 для подвода в них тепло- носителя. Кроме того, аппарат может быть снабжен датчиками температуры в каждой камере смешения 4. Лопасти ротора 8 и 9 имеют периодически изменяющуюся длину.
Известно, что частота собственных колебаний пластин (лопаток, лопастей) определяется из выражения:
где Р„
- частота колебаний пластин, безразмерный коэффициент, зависящий от формы колебаний и услов закр(Ёпления пластин ( Л, 15,4, Л 50,о;- Л, 104,0)i длина пластиныi модуль упругости материала пластины/ I - момент инерции сечения ш1ас
тины
h - масса единицы длины пластины.
Из выражения видно, что частота колебаний пластин в большей степени зависит от ее длины t , и незначительное изменение длины лопаток и лпастей приводит к существенным изменениям частот их собственных колебаний .
Выполнение лопастей ротора с периодически изменяющейся по различным зависимостям длиной, а также
Е Е
5
5 0 5 0
5
0
5
0 5
введение в каждую камеру смешения лопаток различной длины, установленных на статоре по окр ткности, длина которых также периодически меняется по различным зависимостям, приводит к тому, что каждая лопатка и лопасть в камерах смешения имеют собственную частоту колебаний, определяемую из приведенного выражения, следовательно, в каждой камере смешения имеет место широкополосное акустическое поле, интенсивно воздействующее на обрабатываемую среду.
Длина лопастей 8 и 9 и лопаток 6 и 7 может периодически увеличиваться на величину лЕ , в этом случае при обтекании лопаток и лопастей жидкой средой на каждую из них воздействует жидкость, оказывая давление, пропорциональное pV (где р - плотность жидкости, V - скорость жидкости). За последней самой длинной лопаткой образуется зона срыва вихрей. В этой зоне имеет место кавитация, пульсация давления и в ней же располагаются следующие лопатки (лопасти). Та- |ким образом, на лопасти (лопатки) оказывает действие пульсирующий по- ток жидкости, заставляя каждую из них колебаться с максимальной амплитудой в области частот, близких к собственной частоте колебаний.
Длина лопастей 8 и 9 и лопаток 6 и 7 может периодически уменьшаться на величину л .В этом случае на первую лопатку (лопасть) оказывает наибольшее динамическое воздействие набегающий поток жидкости. За этой лопаткой образуется, как и в предыдущем случаеj зона срыва вихрей.Срывающиеся вихри образуются за каждой лопаткой (лопастью). Это также способствует усилению пульсации в области установки группы лопаток, что, в свою очередь, интенсифицирует акус- .тические явления в аппарате.
Длина лопастей 8 и 9 и лопаток 6 и 7 может периодически увеличиваться, а затем уменьшаться. В этом случае эффект такой же, как в двух предыдущих вариантах.
Длина лопастей 8 и 9 и лопаток 6 и 7 может периодически изменяться соответственно на величину В ATsJn X и Si д1 31пх(где &1 и aL - постоянные величины изменения длины лопастей и лопаток, X - произвольная переменная величина). При этом собственная частота колебаний лопастей и лопаток меняется плавно.
В аппарате может л j 4L . При это частоты колебаний лопастей ротора
и лопаток статора неодинаковы, что расширяет акустический спектр аппарата.
Установка лопастей и лопаток в каждой камере в две ступени, где длина лопастей в одной ступени больше длины лопаток в этой ступени, а длина лопастей второй ступени меньше длины лопаток в этой же ступени, приводит к тому, что при движении лопастей ротора относительно лопаток ста- тора в зазорах мелдцу ними возникают значительные срезывакяще напряжения в жидкости и пульсационные явления, интенсифицирующие процессы диспергирования , перемешивания.
Количество ступеней .упругих лопаток 6 и 7 и упругих лопастей 8 и 9 в каждой камере смешения 4, а также изменение длин лопаток и лопастей их сочетание и расположение в груп- пах может быть любым из перечисленных вьш:е вариантов. Это зависит от свойств вводимых в камеры смешения 4 жидкотекучих продуктов.
Аппарат работает следующим об- разом.
Обрабатываемая жидкотекучая среда поступает в корпус через патрубки ввода tO-17. В камере смешения 4 при вращении ротора 3 она подвергается воздействию со стороны упругих лопастей 8 и 9, закрепленных на роторе 3, а также со стороны упругих лопаток 6 и 7, закрепленных на статоре 2. При этом жидкотекучая среда эффективно перемешивается в камерах смешения 4, так как упругие лопатки 6 и 7, закрепленные в статоре 2, предотвращают ее закрутку,
При движении ротора 3 с закрепленными на нем лопастями 8 и 9, установленными в две ступени (при этом длины лопастей меняются по перечисленным зависимостям) , имеет место относительное движение жидкой среды как относительно лопастей 8 и 9 ротора 3, так и относительно лопаток 6 и 7 статора 2. За самыми длинными лопастями
и лопатками образуются зоны высокочастотного срьта вихрей, в которых пульсирует давление, скорость и т.д. что заставляет упругие лопасти и лопатки совершать колебания. Частотньй
спектр акустических колебаний в таких зонах достаточно широк. .Он вызывает интенсивные колебания лопаток и лопастей, причем увеличение амплитуды их колебаний, происходит тогда, когда частоты собственных колебаний лопаток и лопастей в группах совпадают с частотами вьшуждакяцих возмущений. Таким образом, имеет место более полное использование энергии акустических колебаний лопаток и лопастей, так как можно добиться такого режима срыва вихрей (подбором частоты вращения, материала лопаток и лопастей, длины, закона их изменения) , что все лопатки и лопасти в группах будут совершать интенсивные (с максимальной амплитудой) колебания.
Колеблкнциеся лопатки и лопасти интенсивно воздействуют на протекающую в каналах между ними жидкотеку- чую многокомпонентную среду. В этой среде находятся частицы различных размеров, диапазон которых бывает значителен. Перемещаясь в камерах смешения 4, частицы дисперсной фазы различных размеров оказываются у различных лопастей и лопаток. При этом разрушению (диспергированию) подвергаются у данной лопатки или лопасти только те частицы дисперсной фазы, которые наиболее легко разрушаются при действии на них данной частоты (частоты, с которой кблеблется данная лопатка). .
Известно, что диаметр дисперсных частиц, подвергаемых разрушению (делению) в акустическом поле, находится в интервале 0,25-0,1 длины стоячей волны колеблющихся лопастей и лопаток. У другой лопатки (лопасти), колеблющейся с другой частотой, произойдет разрушение (дробление) частиц дисперсной фазы, имеющей другой размер. 1аким образом, процесс дис- пергировайия в аппарате в камерах смешения будет идти на оптимальных условиях для частиц дисперсной фазы различных размеров.
При изменении длины лопастей и лопаток на величины it и &L частоты их собственных колебаний будут меняться соответственно пропорционално величинам
(е,йе) (u«+iLf
где k - число лопастей в группе лопастей, изменяющих длину за один период,
и - число лопаток в группе лопаток, изменяющих длину за один период.
Шаг изменения частоты колебаний зависит от шага изменения длины лопаток и лопастей лЕ и bL . Чтобы уменьшить разницу в собственных час- тотах колебаний двух соседних лопаток и лопастей (уменьшить шаг частот шаг изменения длины лопаток и лопастей целесообразно менять пропорционально функции синуса. В этом случае при мальпс изменениях синусной функции длина лопастей и лопаток меняется на незначительную величину 58 лЕ s«n X и 81 uL sin X , а частоты собственных колебаний таких лопастей и лопаток будут пропорционалны величинам
р .
(e.rae Sinxi
. р
(L aL Sinx)V
При таком плавном изменении часто собственных колебаний лопаток и лопатей будет иметь место более плотный а:кустический спектр частот в аппарате. Большая плотность акустического поля повьш1ает интенсивность диспергирования жидкотекучих систем.
При движении жидкости в осевом направлении аппарата она попадает в зазор между двумя ступенями лопаток и лопастей. Поскольку эти лопасти и лопатки перекрывают друг друга по длине, в этой области камеры смешения А имеют место высокие градиенты скорости, ускорения и т.д., вызванные не только вращением лопастей ротора относительно лопаток статора, но и интенсивными колебаниями последних. Взаимное расположение лопаток и лопастей, их групп в этой области будет циклическ и меняться, что, в свою очередь, приведет к взаимному
0 s 0 5
0
5
5
0
влиянию лопаток на лопасти Сна характер их колебаний) и наоборот. Высокие градиенты скоростей, ускорений, сложная акустическая (меняющаяся во времени) обастановка в этой области интенсифицируют процессы диспергирования, растворения, т.е. интенсифицируют обработку жидкотекучих систем.
Обрабатьшаемая жидкость из одной камеры смешения в другую поступает через радиальнью зазоры 18 между перегородками 5 и ротором 3. Пройдя через весь аппарат, жидкость через выходной патрубок 19 выходит из него.
При неодинаковой длине лопастей .ротора и лопаток статора и синусоидальном изменении длины лопастей и лопаток в аппарате создается широкополосное акустическое поле, интенсифицирующее процессы диспергирования в жидких гетерогенных средах, благо- .даря избирательному воздействию различных длин волн на частицы определенного интервала размеров. При движении лопастей ротора относительно лопаток статора, из-за движения в том же направлении жидкости, находящейся в камерах смешения, имеет место движение последней в канале переменного сечения с резким сужением или расширением. Известно, что в таких каналах имеет место высокочастотный срыв .вихрей, кавитация, что приводит к гидравлическим ударам, а это способствует процессу диспергирования дисперсной фазы, находящейся в дисперсной системе . Расположение лопаток и лопастей в камерах смешения в две ступени приводит к возникновению больших градиентов скоростей ускорений и т.д., возникающих в жидкой среде под действием вращающихся и колеблюощхся лопастей ротора и колеблкичихся и неподвижных лопаток статора в области перехода от одной ступени к другой. Это также интенсифицирует процесс диспергирования в аппарате.
dzA
Л, г
JrA
А J
АФиг,в
Фиг.7
иг.8
А А
Фиг.9
Фиг. 10
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ЖИДКОТЕКУЧИХ СРЕД И РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2090253C1 |
| СПОСОБ ОБРАБОТКИ ЖИДКОТЕКУЧИХ СРЕД В РОТОРНО-ПУЛЬСАЦИОННОМ АКУСТИЧЕСКОМ АППАРАТЕ | 1998 |
|
RU2144423C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ ЖИДКОТЕКУЧИХ СРЕД И РОТОРНО-ПУЛЬСАЦИОННЫЙ АКУСТИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354445C1 |
| Роторно-пульсационный аппарат | 1990 |
|
SU1790990A1 |
| СПОСОБ ОБРАБОТКИ ЖИДКОТЕКУЧИХ СРЕД И РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2142843C1 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АКУСТИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) | 1998 |
|
RU2146967C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ ЖИДКОТЕКУЧИХ СРЕД В РОТОРНО-ПУЛЬСАЦИОННОМ АКУСТИЧЕСКОМ АППАРАТЕ | 2000 |
|
RU2162363C1 |
| МНОГОСТУПЕНЧАТЫЙ РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ | 2002 |
|
RU2206380C1 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ | 2003 |
|
RU2230604C1 |
| АКУСТИЧЕСКИЙ РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ (ВАРИАНТЫ) | 1998 |
|
RU2146170C1 |
Редактор К.Волощук
Составитель Н.Федорова
Техред Г.Гербер Корректор М.Самборская
Заказ 2476/10
Тираж 578Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг.11
| Дозатор | 1984 |
|
SU1249337A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
