Изобретение относится к транспортным устройствам на магнитной подвеске и может быть использовано в высокоскоростных бесконтактных наземных транспортных системах.
Ближайшим по технической сущности и достигаемому эффекту к изобретению является транспортное устройство на электромагнитной подвеске, содержащее кузов с подрессоренными относительно него тягово-направляющими модулями, включающими в себя первичные элементы линейных электродвигателей и электромагниты направления, и с подрессоренными относительно него несущими модулями, включающими в себя электромагниты подвески и аварийно-стояночные опоры, и путевое полотно с ферромагнитными шинами, предназначенными для взаимодействия с электромагнитами, и вторичными элементами линейных электродвигателей.
Описанное устройство обладает следующими недостатками.
В процессе движения экипажа его модули имеют возможность совершать как линейные, так и угловые колебания относительно кузова и пути в вертикальной поперечной плоскости. Это приводит к систематическому нарушению параллельности взаимного расположения полюсных поверхностей активных устройств (электромагнитов и тяговых ЛЭД) экипажа и реактивных шин пути, внося тем самым дополнительные, вредные возмущения в работе ЛЭД и САР электромагнитов. Такие возмущения могут стать причиной пульсирующих изменений силы тяги ЛЭД и вибраций электромагнитов и, передаваясь кузову, снижают комфортабельность транспортного устройства.
Цель изобретения повышение надежности транспортного устройства.
Цель достигается тем, что в транспортном устройстве на электромагнитный подвеске, содержащем кузов с подрессоренными относительно него тягово-направляющими модулями, включающими в себя первичные элементы линейных электродвигателей и электромагниты направления, и с подрессоренными относительно него несущими модулями, включающими в себя электромагниты подвески и аварийно-стояночные опоры, и путевое полотно с ферромагнитными шинами, предназначенными для взаимодействия с электромагнитами, и вторичными элементами линейных электродвигателей, каждый несущий модуль выполнен в виде горизонтальной рамы, жестко связанной с двумя для каждого электромагнита подвески консольными Г-образными балками, опирающимися своими горизонтальными участками через упругодемпфирующие элементы на опорную балку, на которой с помощью соединенных шарнирно с электромагнитом вертикальных подвесок, две из которых соединены с опорной балкой шарнирно, а две другие расположенными перпендикулярно указанным подвескам в продольных по отношению к ним плоскостях торсионными валами, установлен электромагнит подвески, причем рама несущего модуля связана с кузовом через шарнирный механизм. При этом каждый тягово-направляющий модуль может быть связан с кузовом посредством шарнирно закрепленных на кузове и модуле вертикальных подвесок, расположенных попарно симметрично относительно продольной плоскости сечения упомянутого модуля. В тягово-направляющем модуле, по крайней мере, одна пара вертикальных подвесок связана с тягово-направляющим модулем посредством торсионных валов, расположенных перпендикулярно вертикальным подвескам в продольной плоскости, проходящей через соответствующие подвески.
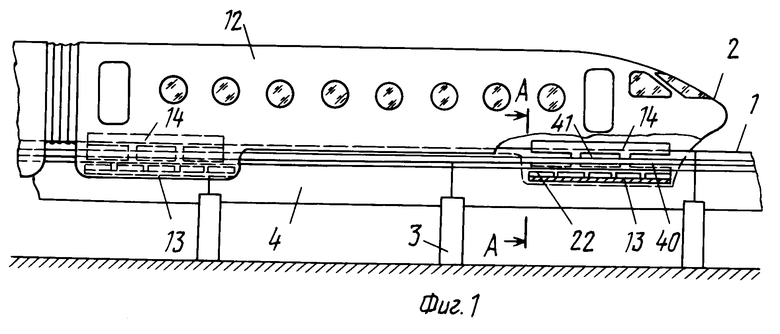
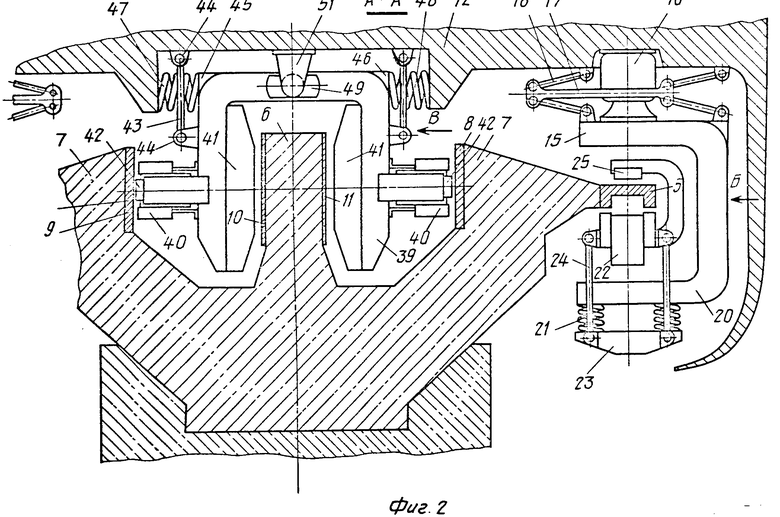
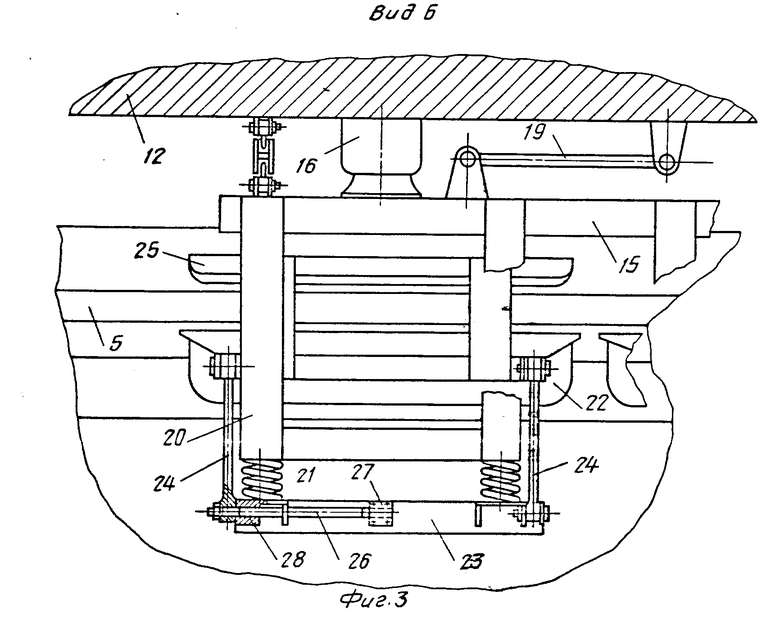
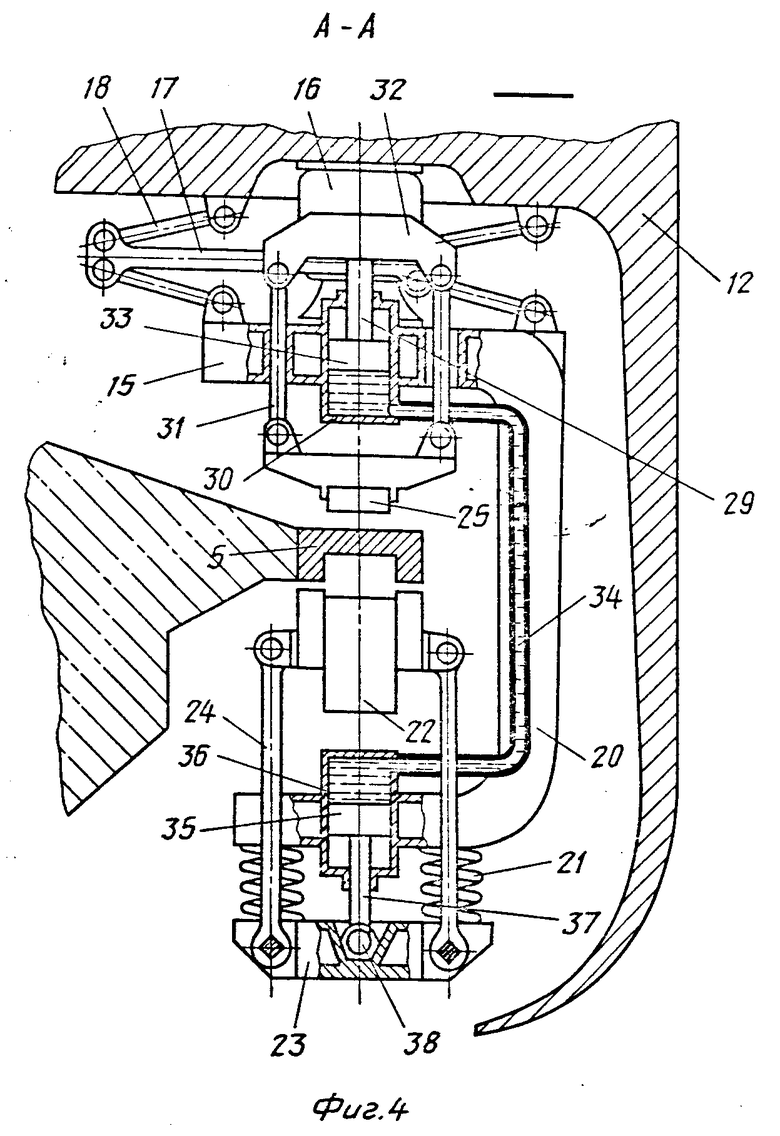
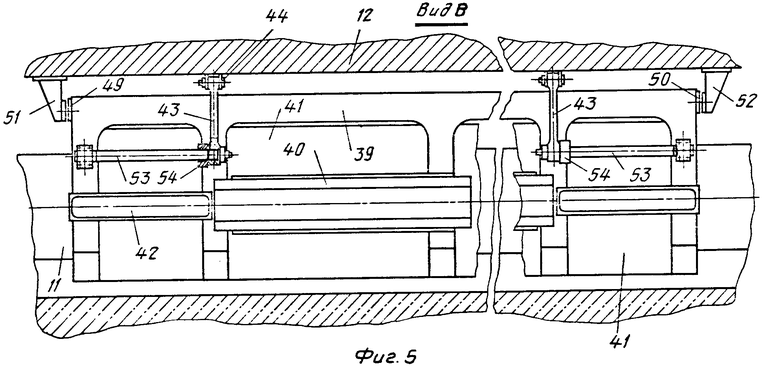
На фиг. 1 показан один из возможных вариантов размещения несущих и тягово-направляющих модулей на кузове экипажа; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 вид по стрелке Б на фиг. 2; на фиг. 4 конструктивная схема, поясняющая работу устройства подвешивания несущего модуля в режимах бесконтактного и контактного опирания (вариант разреза А-А); на фиг. 5 вид по стрелке В на фиг. 2, вариант.
Транспортное устройство (фиг. 1) содержит направляющий путь 1, выполненный в виде эстакады, и транспортное средство 2, состоящее из одной или более связанных между собой единиц подвижного состава (экипажей).
Путь образован дискретно размещенными вдоль направления движения вертикальными опорами 3 и закрепленными на этих опорах Т-образными горизонтальными пролетными балками 4. На нижних горизонтальных поверхностях консолей этих балок (см. фиг. 2) закреплены ферромагнитные П-образные шины 5, а на вертикальных полках продольных буртов 6 и 7 пары плоских ферромагнитных шин 8 и 9 и немагнитных, например из алюминия, токопроводящих полос 10 и 11.
Экипаж включает кузов 12, четыре несущих модуля 13, расположенных попарно в передней и задней частях кузова 12 (см. фиг. 1) симметрично относительно его продольной оси, и два тягово-направляющих модуля 14, подвешенных спереди и сзади кузова 12 так, что продольные оси пути, модуля и кузова лежат в одной вертикальной плоскости.
Каждый из несущих модулей содержит жесткую раму 15, связанную с кузовом как минимум двумя упругодемпфирующими элементами 16, например пневморессорами, парой механизмов параллельного хода в виде параллелограммов из шарнирно сочлененных с кузовом 12, рамой 15 модуля и между собой горизонтальных и наклонных тяг 17 и 18, обеспечивающих сохранение параллельности опорных поверхностей кузова 12 и рамы 15 модуля при их колебаниях, и парой продольных поводков 19, передающих тяговые и тормозные усилия.
Рама 15 несущего модуля консольными балками 20 опирается на упругодемпфирующие элементы 21 подвешивания электромагнитов 22, установленные на опорных балках 23. Последние связаны с электромагнитами системой вертикальных подвесок 24, каждая из которых шарнирно закреплена одним концом на опорной балке 23, другим на электромагните 22. При этом каждый электромагнит 22 крепится как минимум двумя парами подвесок 24, размещенных симметрично по обе стороны от продольной оси электромагнита 22 и его опорной балки 23.
С крайними электромагнитами 22 несущих модулей связаны вертикальными балками, огибающими консоли пути, аварийно-стояночные опоры 25 контактного опирания экипажа, например скользуны-салазки, передающие вертикальную нагрузку на путь в случаях, когда электромагниты отключены (в аварийной ситуации или при стоянке).
Описанная система подвешивания работает следующим образом. При движении экипажа каждый из несущих электромагнитов 22 отслеживает возможные неровности пути самостоятельно, независимо от других, благодаря упругому его сочленению с рамой 15 модуля. Действие на модуль вертикальных выступов и впадин ферромагнитных шин 5 пути сглаживают упругодемпфирующие элементы 21, установленные на опорных балках 23, а непрямолинейности путевых шихт 5 в плане приводят только к искривлению траекторий движения каждого из электромагнитов 22 в отдельности, не внося возмущений в движение всего модуля. При этом искажение траекторий происходит вследствие того, что взаимодействие указанных магнитов с шинами П-образного сечения в случае возникновения их поперечных смещений относительно друг друга сопровождается появлением сил, стремящихся восстановить строго соосное расположение названных элементов, т. е. ликвидировать возникший поперечный сдвиг, возможность же независимых (от других магнитов) боковых смещений представляется каждому из магнитов за счет поворота подвесок 24 в шарнирах.
Важным является то, что несмотря на вертикальные и поперечные колебания магнитов относительно путевых шин плоскости из взаимодействующих граней остаются всегда параллельными. Это обеспечивает равномерное распределение нагрузки по длине и ширине каждого отдельного магнита и повышает стабильность и безопасность работы системы магнитного подвешивания.
В случае необходимости перехода в контактной опоре транспортного средства на путь (при аварии и стоянке) экипаж производит "посадку" на опоры, совершая падение с высоты, в среднем равной зазору в системе электромагнитной подвески (15-20 мм). Если к тому же посадка производится в движении, то для уменьшения динамических воздействий на путь каждая из опорных (скользунов) должна быть подрессорена относительно опирающегося на него транспортного средства. Такую функцию в устройстве выполняют упругодемпфирующие элементы 21 подвешивания электромагнитов 22, благодаря чему исключается необходимость создания специальной, предназначенной для работы в условиях контактного движения, системы подрессоривания.
Эффект самоцентровки несущих электромагнитов 22 относительно ферромагнитных шин 5 пути может быть использован для поперечной стабилизации всего экипажа в случае воздействия на него боковых нагрузок (ветровой или центробежной при прохождении кривых участков пути). Поскольку нагрузки в этом случае передаются через систему подвешивания электромагнитов 22 описываемая система должна обладать такой жесткостью в поперечном направлении, при которой компенсация передаваемых усилий происходила бы при небольших (в пределах 20-40 мм) поперечных деформациях подвешивания. Этого не всегда можно достичь при креплении электромагнитов 22 на вертикальных подвесках 24, в особенности когда их длина регламентируется конструктивными условиями.
В таком случае для увеличения поперечной жесткости системы предлагается включить в работу дополнительные упругие элементы в виде торсионов. Круглый вал 26 (см. фиг. 3) каждого из этих торсионов по концам имеет квадратное сечение. Одним концом он жестко закреплен в квадратном отверстии кронштейна 27 опорной балки 23, а другой конец этого вала поддерживается кронштейном 28, в котором он может свободно проворачиваться вокруг своей продольной оси, и жестко закреплен в квадратном отверстии подвески 24.
При поперечных перемещениях электромагнитов 22 относительно опорных балок 23 подвески 24 поворачиваются вокруг соответствующих осей и скручивают торсионы, которые оказывают противодействие электромагнитов 22 и опорных балок 23, т. е. обеспечить их самоцентровку, и увеличивают боковую жесткость подвешивания.
Описанный ранее вариант конструкции аварийно-стояночных опор экипажа обладает рядом недостатков, из которых наиболее существенны следующие.
Электромагниты 22 и подвески 24, связанные с опорами 25, передают в режиме контактного опирания гораздо большие нагрузки, чем при бесконтактном движении, так как контактная опора несущих модулей осуществляется на две опоры 25, каждая из которых передает нагрузку на один электромагнит 22, а левитацию обеспечивают, как правило, не менее чем четыре электромагнита. Поэтому элементы подвешивания электромагнитов 22, несущих опоры 25, оказывается необходимым выполнять более прочными и массивными, чем аналогичные элементы других электромагнитов 22 того же модуля. Это удорожает и утяжеляет конструкцию, ухудшает ходовые качества экипажа.
Передача динамических нагрузок контактного опирания через столь ответственные элементы, какими являются электромагниты, крайне нежелательна.
Указанные недостатки устраняются применением конструкции, указанной на фиг. 4. Здесь каждая из опор 25 связана с штоком 29 гидроцилиндра, закрепленного корпусом 30 на раме 15 модуля, при помоги пары подвесок 31 и коромысла 32. Полость под поршнем 33 указанного гидроцилиндра сообщается трубопроводом 34 с полостью над поршнем 35 гидроцилиндра, жестко прикрепленного корпусом 36 перпендикулярно к поверхности опоры рамы 15 модуля на упругодемпфирующих элементах 21 подвешивания электромагнита 22. Шток 37 этого гидроцилиндра связан шарниром 38 с геометрическим центром опорной балки 23 и может совершать вертикальные колебания вместе с ней. Названные полости гидроцилиндров и соединяющий их трубопровод заполнены несжимаемой жидкостью.
При вертикальных колебаниях рамы 15 модуля относительно электромагнита 22 и его опорной балки 23 опора 25, закрепленная на этой раме, не меняет своего расположения по отношению к опорной поверхности пути.
Например, при перемещении рамы 15 вверх на некоторое расстояние поршень 35 гидроцилиндра, обращенного к опорной балке 23, высасывает жидкость из-под поршня 33, заставляя связанные с ним шток 29, коромысло 32, подвески 31 и опору 25 опускаться вниз точно на такое же расстояние, так как и площади поршней 33 и 35 равны. Вместе с тем вертикальные перемещения электромагнита 22 относительно пути вызывают такие же перемещения опоры 25.
При переходе экипажа к режиму контактного опирания обесточенный электромагнит 22 и связанные с ним подвески 24 и опорная балка 23 увлекаются вниз под действием собственного веса и распрямляющихся упругих элементов 21, сжатых нагрузкой от веса транспортного средства. Вместе с ними движутся шток 37 и поршень 35 гидроцилиндра, связанного с опорной балкой 23, вызывая перетекание жидкости из-под поршня 33 гидроцилиндра, связанного с опорой 25, и опускание этой опоры до контакта с путем. С этого момента распрямление упругих элементов 21 сменяется их сжатием, так как рама 15 модуля, двигаясь вниз под действием собственного веса и нагрузки от кузова 12 экипажа, перемещает вместе с собой корпус 30 гидроцилиндра, связанного с опорой 25. Остающийся же на месте поршень 33 всасывает внутрь этого гидроцилиндра жидкость над поршнем 35, вызывает перемещение штока 37 и опорной балки 23 вверх и сжатие упругих элементов 21. Сжатие будет происходить до тех пор, пока реакции пружин не уравновесят статистические и динамические силы, передающиеся от рамы 15 модуля к опоре 25, после чего неизбежно начнется процесс собственных вертикальных колебаний рамы 15 модуля и всего экипажа, вызванных его падением на путь при переходе к контактному опиранию.
Таким образом, при применении описанной конструкции электромагнит и его подвески освобождаются от передачи нагрузок в режиме контактного опирания экипажа.
Каждый из тягово-направляющих модулей экипажа включает жесткую раму 39, на вертикальных продольных плоскостях которой закреплены направляющие электромагниты 40 и первичные элементы 41 тяговых линейных электродвигателей, взаимодействующие соответственно с плоскими ферромагнитными шинами 8 и 9 и алюминиевыми полосами 10 и 11 пути. Параллельно электромагнитам 40 установлены скользуны 42, опорные поверхности которых выставлены ближе к ферромагнитным шинам 8 и 9 пути, чем плоскости полюсных граней направляющих магнитов 40. Благодаря этому в режиме контактного движения осуществляют направление экипажа вдоль пути и предотвращают соударения электромагнитов и ЛЭД с путевыми шинами.
По вертикали модуль связан с кузовом 12 экипажа как минимум четырьмя подвесками 43, расположенными попарно, симметрично относительно продольной плоскости сечения модуля и закрепленными по концам в шарнирах 44, допускающих повороты в поперечной вертикальной плоскости. По обе стороны от продольной плоскости сечения модуля по вертикальных полках 45 и 46 установлены комплекты 47 и 48 поперечного подрессоривания, каждый из которых содержит как минимум по обеим сторонам модуля. Для передачи тяговых и тормозных усилий от модуля к кузову экипажа на концах рамы 39 установлены упоры 49 и 50, взаимодействующие с толкателями 51 и 52 кузова.
Рама 39 и первичные элементы 41 двигателя сохраняют строгую ориентацию относительно элементов пути в поперечном направлении под действием как минимум двух пар электромагнитов 40, расположенных симметрично по обеим сторонам модуля.
Благодаря этому возникновение поперечных смещений кузова экипажа относительно тягово-направляющего модуля и пути, например под действием центробежных сил при прохождении кривых участков пути или давления ветра, вызывает сжатие одного из рессорных комплектов 47 или 48 с образованием сил, противодействующих указанным смещениям, т.е. осуществляющих поперечную стабилизацию положения экипажа относительно пути.
Как вариант предложено использовать в качестве упругих элементов поперечного подрессоривания экипажа торсионы. Круглый вал 53 каждого из таких торсионов (см. фиг. 5) имеет квадратное поперечное сечение по концам, один из которых жестко закреплен в кронштейне кузова (или рамы модуля), а другой поддерживается в вертикальном и поперечном направлениях кронштейном 54, не препятствующим поворотам вала вокруг собственной оси, и жестко закреплен в квадратном отверстии верхнего (или нижнего) конца подвески 43. Нормальную работу системы поперечного подрессоривания каждого тягово-направляющего модуля могут обеспечить как минимум два торсиона, располагаемых симметрично по обеим сторонам модуля.
Поперечные смещения кузова относительно рассматриваемого модуля вызывают отклонения подвесок 43 от вертикального расположения, сопровождающиеся упругим скручиванием торсионов 53, которые препятствуют указанным смещениям, т. е. стабилизируют положение экипажа.
Описанные варианты подвешивания тягово-направляющих модулей, обеспечивая упругую передачу поперечных нагрузок от кузова экипажа к направляющим электромагнитам, позволяют также уменьшить вероятность возникновения непараллельности активных поверхностей электромагнитов и первичных элементов тяговых двигателей относительно соответствующих пассивных элементов пути. Такая непараллельность в предложенных конструкциях может возникнуть только при боковых наклонах кузова. Параллельное же расположение названных поверхностей электромагнитов и двигателей необходимо для обеспечения нормальной их работы, характеризующейся равномерным распределением тяговых и направляющих усилий по длине и высоте этих устройств.
Технико-экономическая эффективность от использования транспортного устройства заключается в следующем:
повышаются плавность, безопасность движения экипажа и комфортабельность как в режиме левитации, так и при опирании на путь;
улучшается прохождение несущими электромагнитами экипажа вертикальных неровностей и горизонтальных искривлений пути, что позволяет снизить точность укладки ферромагнитных шин пути и уменьшить тем самым стоимость его постройки и эксплуатации;
благодаря обеспечению плоскопараллельности перемещений электромагнитов подвески и направления и первичных элементов тяговых двигателей относительно кузова экипажа создаются условия для равномерного распределения нагрузок по всей площади их активных поверхностей, чем повышается стабильность характеристик и надежность работы указанных устройств;
вместо двух систем упругого подрессоривания опорных устройств экипажа, одна из которых предназначалась бы для работы в режиме левитации (подвешивание электромагнитов), а другая при движении на контактных опорах (подвешивание скользунов), предложенная конструкция содержит одну такую систему, включающую в работу в обоих названных режимах, причем для каждого режима эта система может обладать различными, наиболее благоприятными по условиям движения упругими качествами;
система регулирования положения устройств контактного опирания экипажа относительно пути позволяет стабилизировать с точностью до величины изменения зазора между несущими электромагнитами и ферромагнитной шиной пути высоту, с которой экипаж может падать на опорную поверхность путевой эстакады при аварии в системе магнитного подвеса или переходе на стоянку. Этим снимаются динамические нагрузки, действующие на путь и контактные опоры экипажа при его посадке, и повышается надежность и долговечность работы этих устройств;
применение торсионных устройств в подвешивании несущих электромагнитов и тягово-направляющих модулей экипажа достигается уменьшение в 5-10 раз габаритов и в 2-3 раза веса элементов этого подвешивания в сравнении с вариантом, в котором упругими элементами такой же энергоемкости являются пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| Восьмиосный рельсовый экипаж | 2021 |
|
RU2760372C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294296C1 |
| ЛЮЛЕЧНОЕ ПОДВЕШИВАНИЕ КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО | 1972 |
|
SU338433A1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294297C1 |
| Безрамная двухосная тележка железнодорожного транспортного средства | 1990 |
|
SU1794730A1 |
| ЭКИПАЖНАЯ ЧАСТЬ ЛОКОМОТИВА | 2006 |
|
RU2320508C1 |
| ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2166449C1 |
| ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2302956C1 |
| Связь кузова локомотива с подрессоренной частью тележки | 1986 |
|
SU1446007A1 |
(57) ТЕКСТ РЕФЕРАТА ОТСУТСТВУЕТ
| СТРЕЛЯЮЩЕЕ УСТРОЙСТВО С БОЕПРИПАСАМИ, ИМЕЮЩИМИ ПРОТОЧКУ В ГИЛЬЗЕ | 2015 |
|
RU2626439C2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
