Изобретение относится к специальной фототехнике, в частности к приборам со стабилизацией изображения, и предназначен для визуального наблюдения удаленных объектов и их дальнейшей цифровой фоторегистрации «с рук» оператора (возможно оператором, находящимся на движущемся транспортном средстве).
Известные наблюдательные приборы с возможностью фоторегистрации изображения, например, патент RU №2324896 под названием «Оптический прибор разведки», опубликованный 20.05.2008 г. Прибор состоит из лазерного дальномера, содержащего визир, блок управления и цифровой индикатор, и блок измерения азимута и угла места, фототелескопа, фотоприемной матрицы, оптически сопряженной с фототелескопом, электронного устройства обработки и сохранения изображения, а также фотоиндикатора, высокоскоростного канала связи и модуля сопряжения. Согласно изобретению блок измерения магнитного азимута и угла места состоит из модуля трехосного электронного датчика магнитного поля, электронных датчиков наклона магнитного датчика в двух плоскостях и микропроцессора с программной памятью, вычисляющего магнитный азимут, а также угла места. Применение данного вида стабилизации изображения не позволяет получать качественные снимки при проведении съемок быстродвижущихся объектов «с рук» или при размещении оператора на движущемся транспортном средстве, т.к. в системе нет оптических элементов, обеспечивающих стабилизацию и формирование изображения наблюдаемого объекта.
Наиболее полно конструкция оптической системы стабилизации изображения представлена в патенте US №4235506, опубликованном 25.11.1980 г. В системе стабилизации изображения каждая из двух телескопических систем содержит: объектив, окуляр и прямую призму, размещенную между ними, причем главные оптические оси параллельны. Объективы и окуляры жестко крепятся на корпусе, прямые призмы установлены с возможностью поворота с помощью карданного подвеса с ротором. Две оси вращения карданного подвеса пересекаются под прямым углом, причем одна из них пересекает под прямым углом главные оптические оси, а вторая ось проходит через середину промежутка между главными оптическими осями и перпендикулярна плоскости, в которой они находятся. Электродвигатель предназначен для вращения ротора, ось вращения которого параллельна главным оптическим осям. Прецизионное устройство для перемещения карданного подвеса позволяет следить за объектом во время панорамирования. Основной элемент гироблока - маховик закреплен автономно от двигателя в своих подшипниковых опорах и соединяется с ним через муфту, при этом токопроводящие элементы питания двигателя выполнены в виде 4-х пар контактных групп, расположенных в зонах подшипниковых опор внутренней и наружной рамок гироблока. Конструкция энергогасителей выполнена в виде двух однокамерных полостей с жидкостью, расположенных на наружной рамке и обеспечивает энергорассеяние только при смещении прибора в горизонтальной плоскости.
Описанная выше конструкция оптической системы является наиболее близкой к заявляемому изобретению. Однако в таком устройстве отсутствует энегорассеяние в вертикальной плоскости, что приводит к недопустимо низкому качеству изображения по вертикали. Этой же проблеме способствуют большие потери на трение в 4-х парах токопроводящих контактных групп, а автономное от гиродвигателя закрепление в подшипниковых опорах главного элемента стабилизации - маховика, увеличивает момент инерции гироскопического блока, его вес и трудоемкость изготовления.
Технической задачей заявляемого изобретения является создание прибора, в котором реализуется получение технического результата, а именно - комфортного, эффективного слежения и качественной фоторегистрации движущегося объекта съемки с рук, в том числе при размещении оператора на подвижных объектах (суда, вертолеты, автомобили) при улучшенных эксплуатационных характеристиках (сниженных энергопотреблении и уровне акустического шума).
Это достигается тем, что наблюдательный прибор со стабилизацией и цифровой фоторегистрацией содержит два оптических канала, гироскопический блок, включающий наружную рамку, шарнирно закрепленную на корпусе прибора, внутреннюю рамку с гиродвигателем и маховиком, закрепленную шарнирно на наружной рамке, магнитный корректор. Гиродвигатель закреплен в корпусе гиродвигателя. Магнитный корректор необходим для возврата через бесконтактное магнитное взаимодействие с маховиком, внутренней рамки в нулевое положение, т.е. в положение совпадения оси магнитного корректора с осью гиродвигателя. Арретир служит для выключения гироскопического блока из рабочего режима. Первый оптический канал используется для визуального наблюдения за объектом. Каждый из оптических каналов содержит объектив, призменный оптический блок стабилизации изображения, закрепленный на внутренней рамке гироскопического блока. Первый канал содержит окуляр, жестко закрепленный на корпусе прибора.
В отличие от известного, второй оптический канал - это канал для формирования цифрового изображения на ПЗС-матрицу, содержит ЖК экран и блок управления. В гироскопическом блоке размещены жидкостные гасители колебаний, расположенные симметрично и соосно с осями вращения обеих рамок. Внутренние полости гасителей выполнены в виде кольцевых объемов с жидкостью, негерметично разделенных друг от друга концентрическими перегородками. Токопроводящие элементы электропитания гиродвигателя выполнены в виде токопроводов минимальной жесткости. Маховик жестко закреплен на оси гиродвигателя с центром тяжести в области пересечения осей вращения наружной и внутренней рамок. Свободная от крепления сторона маховика находится в бесконтактном магнитном взаимодействии с магнитным корректором. Корпус гиродвигателя взаимодействует с фиксирующими элементами арретира.
На фигурах 1-3 изображена предлагаемая конструкция наблюдательного прибора со стабилизацией и цифровой фоторегистрацией.
Где:
1 - гиродвигатель;
2 - корпус гиродвигателя;
3 - маховик;
4 - внутренняя рамка;
5 - призменный оптический блок стабилизации изображения - 2 шт;
6 - наружная рамка;
7 - корпус прибора;
8 - жидкостные гасители колебаний (демпферы) - 4 шт.;
9 - концентрические перегородки;
10 - магнитный корректор;
11 - узел арретира;
12 - токопроводящие элементы питания (токопроводы);
13 - объектив фоторегистрирующего канала;
14 - объектив визирного канала;
15 - зубчатое колесо;
16 - матрица;
17 - окуляр визирного канала;
18 - кнопка арретира;
19 - подпружиненный рычаг;
20 - отводная призма;
21 - цифровой блок управления;
22 - кнопка включения/выключения блока управления;
23 - колпак;
24 - ось вращения внутренней рамки - 2 шт.;
25 - ось вращения наружной рамки - 2 шт;
26 - пластина арретира;
27 - пластина арретира;
28 - кнопка включения/выключения гиродвигателя;
29 - кнопка фоторегистрации;
30 - блок питания.
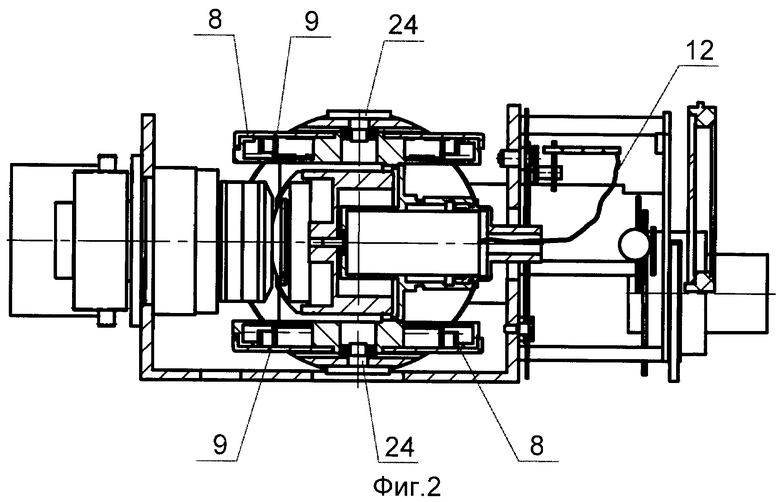
В приборе (фиг.1) применен гиродвигатель 1, закрепленный в корпусе гиродвигателя 2. Маховик 3 жестко закреплен на оси гиродвигателя. Корпус гиродвигателя 2 закреплен на внутренней рамке 4. На этой же рамке 4, симметрично относительно оси маховика 3 расположены два призменных оптических блока стабилизации изображения 5. Внутренняя рамка 4 шарнирно закреплена в наружной рамке 6 с вертикальной осью вращения, проходящей через ось маховика 3. Наружная рамка 6 шарнирно закреплена в корпусе 7 прибора с осью вращения в горизонтальной плоскости. Ось вращения наружной рамки 6 проходит через ось маховика 3 и находится в одной плоскости с осью внутренней рамки 4. На внутренней рамке 4 и наружной рамке 6 симметрично и соосно с осями вращения сверху и снизу, относительно горизонтали, закреплены жидкостные гасители колебаний (демпферы) 8, с одной или несколькими кольцевыми, негерметичными относительно друг друга, концентрическими перегородками 9 для увеличения площади жидкостного трения. Маховик 3 свободным концом, при вращении бесконтактно взаимодействует с магнитным корректором 10, закрепленным на корпусе 7, а корпус гиродвигателя 2 фиксируется узлом арретира 11, при этом подвод питания гиродвигателя выполнен в виде свободно расположенных токопроводов 12 малой жесткости (см. фиг.3) и соединяют гиродвигатель 1 с блоком питания 30. На корпусе 7 прибора (см. фиг.1) закреплены объектив 13 фоторегистрирующего канала и объектив 14 визирного канала. Оба объектива связаны между собой жесткой кинематической связью в виде зубчатого колеса 15. В фоторегистрирующий канал, помимо объектива 13, входит призменный блок 5, цифровой блок управления 21 с матрицей 16. В визирный канал помимо объектива 14 входит призменный блок 5, окуляр 17 и отводная призма 20. Передняя стенка колпака 23 входит в зазор между элементами магнитного корректора 10. Задняя часть корпуса гиродвигателя 1 через пластины 26 и 27 (см. фиг.3), подпружиненный рычаг 19 арретира 11 жестко фиксируется в нерабочем положении. Кнопка арретира 18 при движении по стрелке «А» освобождает гироскопический блок. Включатель/выключатель гиродвигателя 1 выполнен в виде кнопки 28.
Прибор работает следующим образом. При нажатии на кнопки 28 и 29 включается система питания гиродвигателя 1 и цифровой блок управления 21. Маховик 3 вместе с колпаком 23 разгоняется до номинальных оборотов. В таком положении система гиростабилизации не работает, т.к. внутренняя и наружная рамки 4 и 6 через корпус гиродвигателя 1 жестко зафиксированы в нулевом положении пластинами арретира 26, 27 и подпружиненным рычагом 19. Наблюдение за объектом осуществляется при нажатой кнопке арретира 18. При необходимости получения фиксированной информации (фотоснимок) нажимается кнопка 29 и полученное изображение сбрасывается с ПЗС-матрицы на носитель памяти (Флэшку). При нажатии на кнопку арретира 18 система освобождается, при этом автоматически включается система стабилизации оптического изображения. Рамки 4 и 6 стабилизируются в двух плоскостях, по вертикали и по горизонтали, за счет приобретенного кинетического момента от вращения маховика 3. Величина кинетического момента значительно больше фрикционных потерь в опорах рамок, что обеспечивает гарантированную устойчивость гироскопического блока от внешних воздействий. Угловые колебания корпуса прибора 7 в заданном диапазоне не влияют на стабильное положение изображения объекта, при этом высокочастотные вибрации устраняются жидкостными гасителями колебаний 8, как в вертикальной, так и в горизонтальной плоскости. Эффективность энергоносителей значительно возрастает за счет увеличения количества поверхностей трения жидкости со стенками концентрических перегородок 9.
Для уменьшения потерь на трение в осях вращения 24, 25 внутренней и наружной рамок подвод энергии к гиродвигателю 1, вместо 4-х пар контактных пластин, выполнен в виде свободно расположенных токопроводов 12 предельно малой жесткости. Такой способ энергообеспечения полностью исключает трение, как фактор помех, а момент, создаваемый токоподводящими элементами малой жесткости на внутреннюю рамку, не оказывает заметного влияния на качество стабилизации и, как следствие, на качество цифровой фоторегистрации объекта. Бесконтактное взаимодействие колпака 23 с магнитным корректором 10 обеспечивает, в процессе наблюдения, возврат изображения в нулевое положение.
Уменьшение момента инерции внутренней рамки 4 достигается за счет расположения центра тяжести системы: гиродвигатель 1, корпус гиродвигателя 2 - маховик 3 с колпаком 23 в зоне, максимально близкой к оси вращения, при этом центры тяжести призменных оптических блоков 5 расположены симметрично и максимально близко к оси вращения наружной рамки 6. Такая конструкция дает возможность обеспечить качественную стабилизацию и фоторегистрацию объекта съемки, движущегося с угловой скоростью до 20°/сек и угловыми колебаниями прибора в пределах ±7°.
Изделий с такими характеристиками в мировой практике не обнаружено.
В результате предложенный наблюдательный прибор со стабилизацией и цифровой фоторегистрацией позволяет комфортно, эффективно следить и производить качественную фоторегистрацию объектов съемки с рук, в том числе при размещении оператора на подвижных объектах (суда, вертолеты, автомобили) при улучшенных эксплуатационных характеристиках (сниженные энергопотребление и уровень акустического шума).
| название | год | авторы | номер документа |
|---|---|---|---|
| БИНОКЛЬ СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 1995 |
|
RU2080634C1 |
| УСТРОЙСТВО ГИРОСКОПИЧЕСКОЙ СТАБИЛИЗАЦИИ ЛИДАРА В ПЛОСКОСТИ ГОРИЗОНТА | 2007 |
|
RU2329468C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| БИНОКЛЬ СО СТАБИЛИЗИРОВАННЫМ ОПТИЧЕСКИМ ИЗОБРАЖЕНИЕМ | 1995 |
|
RU2082199C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189011C1 |
| СПОСОБ ЗАПУСКА ГИРОСКОПИЧЕСКОГО ПРИБОРА С ПРУЖИННЫМ ГИРОМОТОРОМ СОВМЕЩЕННОГО ТИПА В НАРУЖНОМ КАРДАНОВОМ ПОДВЕСЕ | 2001 |
|
RU2189013C1 |
| Гировертикаль | 1989 |
|
SU1789858A1 |
| СПОСОБ ВЗВЕДЕНИЯ ПРУЖИНЫ ГИРОМОТОРА | 2001 |
|
RU2189012C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2021 |
|
RU2785798C1 |

Прибор содержит два оптических канала, гироскопический блок и арретир. Гироскопический блок включает наружную рамку, шарнирно закрепленную на корпусе прибора, внутреннюю рамку с маховиком и гиродвигателем, шарнирно закрепленную на наружной рамке, и магнитный корректор. Магнитный корректор возвращает внутреннюю рамку через бесконтактное магнитное взаимодействие с маховиком в нулевое положение. Каждый из оптических каналов содержит объектив и призменный оптический блок стабилизации изображения, закрепленный на внутренней рамке гироскопического блока. Первый канал содержит окуляр. Второй оптический канал содержит ЖК экран и блок управления. В гироскопическом блоке размещены жидкостные гасители колебаний. Маховик жестко закреплен на оси гиродвигателя с центром тяжести в области пересечения осей вращения наружной и внутренней рамок. Свободная от крепления сторона маховика находится в бесконтактном магнитном взаимодействии с магнитным корректором. Корпус гиродвигателя взаимодействует с фиксирующими элементами узла арретира. Технический результат - повышение эффективности слежения и фоторегистрации движущегося объекта съемки с рук при размещении оператора на подвижных объектах. 3 ил.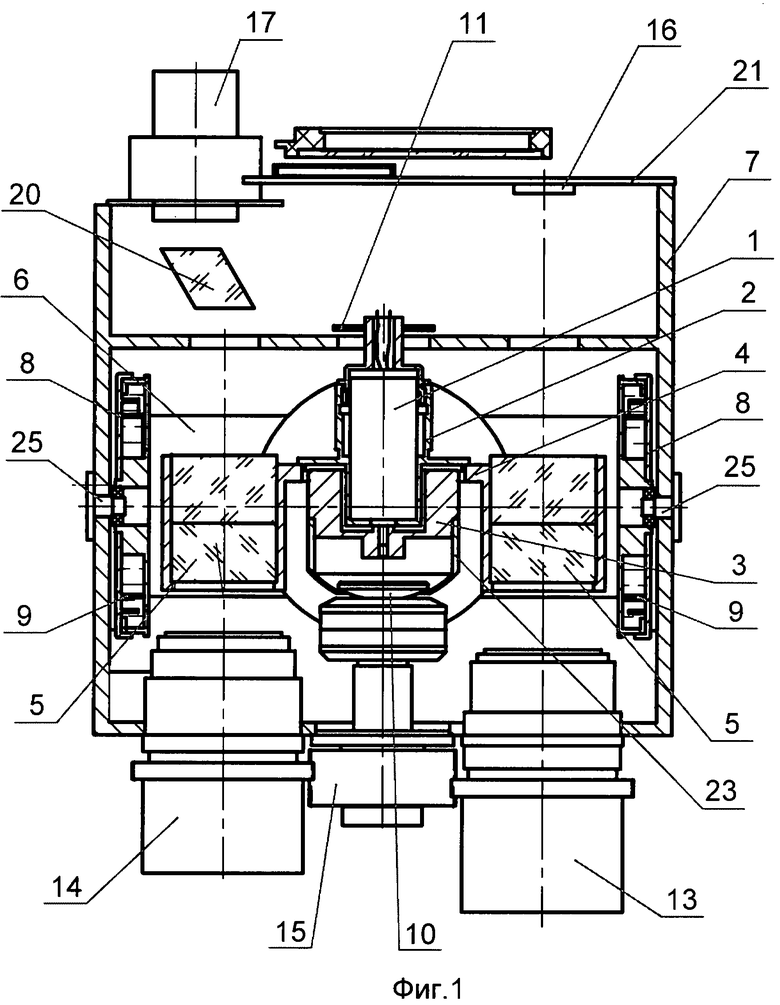
Наблюдательный прибор со стабилизацией и цифровой фоторегистрацией, содержащий два оптических канала, гироскопический блок, включающий наружную рамку, шарнирно закрепленную на корпусе прибора, внутреннюю рамку с маховиком и гиродвигателем, находящимся в корпусе гиродвигателя, шарнирно закрепленную на наружной рамке, магнитный корректор для возврата внутренней рамки через бесконтактное магнитное взаимодействие с маховиком в нулевое положение, а именно в положение совпадения оси магнитного корректора с осью гиродвигателя, арретир для выключения гироскопического блока из рабочего режима, каждый из оптических каналов содержит объектив, призменный оптический блок стабилизации изображения, закрепленный на внутренней рамке гироскопического блока, первый канал предназначен для визуального наблюдения за объектом, содержит окуляр, жестко закрепленный на корпусе прибора, отличающийся тем, что второй оптический канал - канал для формирования цифрового изображения на ПЗС-матрицу содержит ЖК-экран и блок управления, причем в гироскопическом блоке размещены жидкостные гасители колебаний, расположенные симметрично и соосно с осями вращения обеих рамок, внутренние полости гасителей выполнены в виде кольцевых объемов с жидкостью, негерметично отделенных друг от друга концентрическими перегородками, токопроводящие элементы электропитания гиродвигателя, выполненные в виде токопроводов минимальной жесткости, маховик жестко закреплен на оси гиродвигателя с центром тяжести в области пересечения осей вращения наружной и внутренней рамок, а свободная от крепления сторона маховика находится в бесконтактном магнитном взаимодействии с магнитным корректором, корпус гиродвигателя взаимодействует с фиксирующими элементами узла арретира.
| US 4235506 А, 25.11.1980 | |||
| БИНОКУЛЯРНАЯ СИСТЕМА СО СТАБИЛИЗАЦИЕЙ ИЗОБРАЖЕНИЯ | 2003 |
|
RU2229149C1 |
| US 5539575 А, 23.07.1996 | |||
| US 6515799 В2, 04.02.2003. | |||

