Изобретение относится к устройствам автоматики и предназначено для управления асинхронным двигателем цифровых следящих систем с тиристорным усилителем мощности.
Цель изобретения - повыщение точности работы устройства при изменении частоты и формы питающего напряжения.
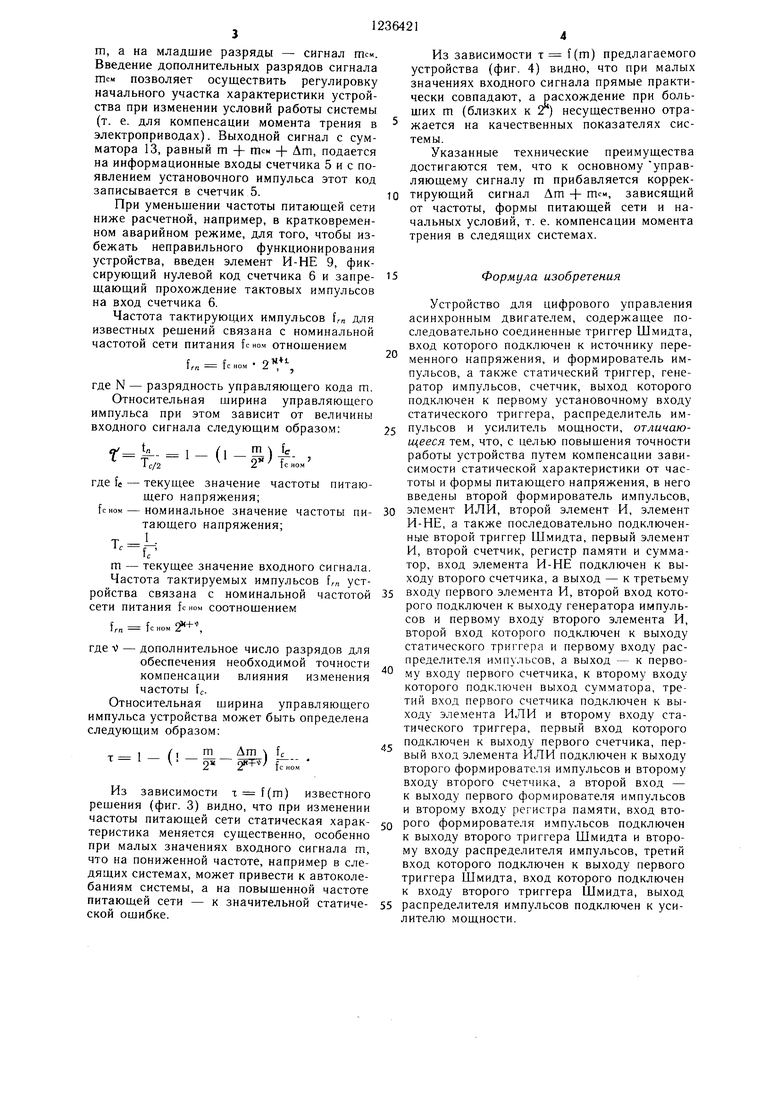
На фиг. 1 показана блок-схема предла- га емого,устройства; на фиг. 2 - временные диаграммы сигналов; на фиг. 3 и 4 - зависимости относительной щирины управляющего импульса от кода управления.
Устройство содержит первый 1 и второй 2 триггеры Шмидта первый 3 и второй 4 формирователи импульсов, первый 5 и второй 6 счетчики, первый 7 и второй 8 элементы И, элемент И-НЕ 9, элемент ИЛИ 10, статический триггер 11, генератор 12 импульсов, сумматор 13, распределитель 14 импульсов, усилитель 15 мощности, регистр 16 памяти.
Кроме того, на временных диаграммах сигналов, поясняющих работу устройства (фиг. 2) приняты следующие обозначения: 17 и 18 - напряжения питающей сети; 19- 22 - прямоугольные напряжения, формируемые триггерами Шмидта 1 и 2; 23-26 - последовательности импульсов, формируемые формирователями 3 и 4 импульсов, 27 и 28 - последовательности импульсов на выходе элемента ИЛИ 10, 29 - импульсы с выхода генератора 12 импульсов, 30 и 31 - управляющие импульсы Q на выходе статического триггера 11.
Устройство для цифрового управления асинхронным двигателем работает следующим образом.
В момент перехода синусоидального напряжения 17 и 18 питания через ноль от отрицательного полупериода к положительному и обратно триггеры Шмидта 1 и 2 формируют прямоугольные напряжения Ui, и| (19 и 20) и Ua, U2 (21 и 22) (фиг. 2), длительность которых определяется порогом срабатывания триггеров Шмидта 1 и 2 и частотой напряжения питания. Порог срабатывания выбирается в зависимости от максимально возможного искажения формы синусоидального напряжения питания и подбирается экспериментально (фиг. 2). Формирователи 3 и 4 импульсов вырабатывают последовательности импульсов fi (23 и 24) и f2 (25 и 26). Эти импульсы (27 и 28) через элемент ИЛИ 10 в начале каждого полупериода питающего напряжения производят запись управляюпл,его кода ш в счетчик 5 и устанавливают статический триггер 11 в состояние, при котором через элемент И 8 импульсы Irn (29) с генератора 12 импульсов проходят на счетный вход счетчика и заполняют его. В момент переполнения счетчика 5 импульс переноса устанавливает статический триггер 1 в состояние, запрещающее прохождение тактовых импульсов на вход счетчика 5. В начале сле0
5
0
5 Е,
дующего полупериода процессы повторяются, и в результате на выходе статического триггера 11 вырабатывается последовательность Q импульсов (30 и 31) переменной длительности (фиг. 2), начало которых совпадает с моментом переполнения счетчика 5 и зависит от величины управляющего кода т, а конец - с началом следующего полупериода. Управляющие импульсы Q далее поступают на вход распределителя 14 импульсов, на управляющие входы которого поступают сигналы Ui, U| (19 и 20) и U2 U2 (21 и 22), несущие информацию о знаке полупериода питающего напряжения и знаковый разряд входного сигнала т. В данном случае в качестве распределителя импульсов могут быть использованы четыре микросхемы 4И-НЕ с открытым коллектором, на входы которых наряду с импульсами Q поступает нужная комбинация сигналов Ui, U|, Us, L L sign Ш и sign m.
Коррекция зависимости статической характеристики устройства от частоты и питающей сети обеспечивается следующим образом. В моменты времени, определяемые импульсами fi, в счетчик 6 записывается заранее выбранное число Мо, превыщающее
0
5
;--- , где fcмин - минималь ное значение час1с мин
тоты питающей сети, и на время действия сигналов Ui, Uj, сформированных триггером Шмидта 2, через элемент И 7 с генератора 12 импульсов поступают импульсы на вычитающий вход счетчика 6.
В результате на выходах счетчика 6 в конце первого полупериода будет число
Дт Мо - р, которое с помощью импуль с
СОВ t2, 2 переписывается в регистр 16 памяти.
Корректирующий сигнал Дт изменяется в диапазоне.
Мо -- J- - Лт Мо -
Iс инн1с макс
Для обеспечения необходимой точности компенсации влияния изменения частоты сети fc следует увеличивать разрядность устройства на v единиц. Дополнительное число разрядов v может быть подсчитано по формуле
(f - r TtMM Тсла-игде S - диапазон изменения корректирующего сигнала Дт.
В результате число импульсов, поступающих на вход счетчика 6 от генератора 12 импульсов, и, как следствие, код на выходе счетчика 6 и регистра 16 будут соответствовать частоте питающей сети. Этот код в качестве первого слагаемого поступает на первый вход сумматора 13, на старшие разряды второго входа поступает сигнал управления
m, a на младшие разряды - сигнал тем Введение дополнительных разрядов сигнала тем позволяет осуществить регулировку начального участка характеристики устройства при изменении условий работы системы (т. е. для компенсации момента трения в электроприводах). Выходной сигнал с сумматора 13, равный ш + тем -|- Дт, подается на информационные входы счетчика 5 и с появлением установочного импульса этот код записывается в счетчик 5.
При уменьшении частоты питаюшей сети ниже расчетной, например, в кратковременном аварийном режиме, для того, чтобы избежать неправильного функционирования устройства, введен элемент И-НЕ 9, фиксирующий нулевой код счетчика 6 и запре- щающий прохождение тактовых импульсов на вход счетчика 6.
Частота тактирующих импульсов ,„ для известных решений связана с номинальной частотой сети питания Геном отношением
. fc
где N - разрядность управляющего кода т. Относительная ширина управляющего импульса при этом зависит от величины входного сигнала следующим образом:
tn - 1 ( m fc I - - i - U - ; 1- ;
1 c/2Zle HOM
где fe
TC HOM
c/2
текущее значение частоты питающего напряжения; номинальное значение частоты питающего напряжения; 1
Т -
m - текущее значение входного сигнала.
Частота тактируемых импульсов ,„ устройства связана с номинальной частотой сети питания Геном соотношением
frn fe О 2 ,
где V - дополнительное число разрядов для
обеспечения необходимой точности
компенсации влияния изменения
частоты fc.
Относительная ширина управляющего
импульса устройства может быть определена
следующим образом:
1 ( т . ок
АП fc
ОК4--0/ f Те ном
Из зависимости т f(rn) известного решения (фиг. 3) видно, что при изменении
35 входу первого элемента И, второй вход которого подключен к выходу генератора импульсов и первому входу второго элемента И, второй вход которого подключен к выходу статического триггера и первому входу распределителя импульсов, а выход - к первому входу первого счетчика, к второму входу которого подключен выход сумматора, третий вход первого счетчика подключен к выходу элемента ИЛИ и второму входу статического триггера, первый вход которого подключен к выходу первого счетчика, первый вход элемента ИЛИ подключен к выходу второго формирователя импульсов и второму входу второго счетчика, а второй вход - к выходу первого формирователя импульсов и второму входу регистра памяти, вход вточастоты питающей сети статическая харак- до рого формирователя импульсов подключен
теристика меняется существенно, особенно при малых значениях входного сигнала т, что на пониженной частоте, например в следящих системах, может привести к автоколебаниям системы, а на повышенной частоте питающей сети - к значительной статической ошибке.
55
к выходу второго триггера Шмидта и второму входу распределителя импульсов, третий вход которого подключен к выходу первого триггера Шмидта, вход которого подключен к входу второго триггера Шмидта, выход распределителя импульсов подключен к усилителю мощности.
Из зависимости т f(m) предлагаемого устройства (фиг. 4) видно, что при малых значениях входного сигнала прямые практически совпадают, а расхождение при больших m (близких к 2) несущественно отражается на качественных показателях системы.
Указанные технические преимущества достигаются тем, что к основному управляющему сигналу m прибавляется корректирующий сигнал Am -}- тем, зависящий от частоты, формы питающей сети и начальных условий, т. е. компенсации момента трения в следящих системах.
Формула изобретения
15
5
0
5
20
Устройство для цифрового управления асинхронным двигателем, содержащее последовательно соединенные триггер Шмидта, вход которого подключен к источнику переменного напряжения, и формирователь импульсов, а также статический триггер, генератор импульсов, счетчик, выход которого подключен к первому установочному входу статического триггера, распределитель импульсов и усилитель мощности, отличающееся тем, что, с целью повышения точности работы устройства путем компенсации зависимости статической характеристики от частоты и формы питающего напряжения, в него введены второй формирователь импульсов,
0 элемент ИЛИ, второй элемент И, элемент И-НЕ, а также последовательно подключенные второй триггер Шмидта, первый элемент И, второй счетчик, регистр памяти и сумматор, вход элемента И-НЕ подключен к выходу второго счетчика, а выход - к третьему
5 входу первого элемента И, второй вход которого подключен к выходу генератора импульсов и первому входу второго элемента И, второй вход которого подключен к выходу статического триггера и первому входу распределителя импульсов, а выход - к первому входу первого счетчика, к второму входу которого подключен выход сумматора, третий вход первого счетчика подключен к выходу элемента ИЛИ и второму входу статического триггера, первый вход которого подключен к выходу первого счетчика, первый вход элемента ИЛИ подключен к выходу второго формирователя импульсов и второму входу второго счетчика, а второй вход - к выходу первого формирователя импульсов и второму входу регистра памяти, вход втоо рого формирователя импульсов подключен
рого формирователя импульсов подключен
к выходу второго триггера Шмидта и второму входу распределителя импульсов, третий вход которого подключен к выходу первого триггера Шмидта, вход которого подключен к входу второго триггера Шмидта, выход распределителя импульсов подключен к усилителю мощности.
(piv, /
0IZI ...n:L .n. ni. fTT
j ,rn ..r:i..r-... .
.4
(Составитель В. Королев
Редактор Н. ТупицаТехред И. ВересКорректор /. Тяско
Заказ 3088/49 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4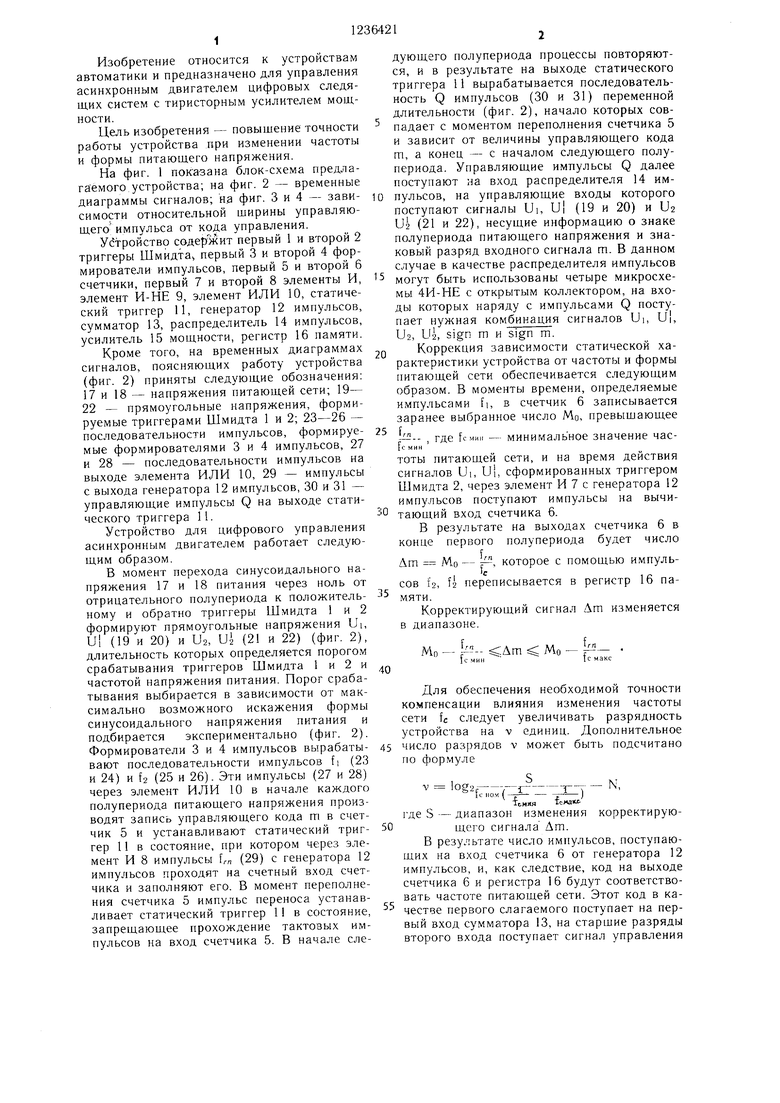
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для цифрового управления асинхронным двигателем | 1980 |
|
SU875336A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1980 |
|
SU868962A1 |
| ТРЕХФАЗНЫЙ БЕСТРАНСФОРМАТОРНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2020 |
|
RU2758443C1 |
| Устройство импульсного регулирования мощности в @ -фазной сети без нейтрали | 1985 |
|
SU1272327A1 |
| БЕСТРАНСФОРМАТОРНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 2018 |
|
RU2691968C1 |
| Устройство для управления @ -пульсным выпрямителем | 1986 |
|
SU1363405A1 |
| Устройство для импульсного регулирования мощности в @ -фазной сети без нейтрали и схема управления вентилями устройства для импульсного регулирования мощности в @ -фазной сети без нейтрали | 1983 |
|
SU1120467A1 |
| ЦИФРОВОЕ ФАЗОСМЕЩАЮЩЕЕ УСТРОЙСТВО | 2017 |
|
RU2658598C1 |
| Устройство для пуска асинхронного электродвигателя | 1984 |
|
SU1274099A1 |
Изобретение относится к устройствам автоматики и предназначено для управления асинхронным двигателем цифровых следящих систем с тиристорным усилителем мощности. Устройство позволяет повысить точность управления при изменении частоты и формы питающего напряжения за счет формирования корректирующего кодового сигнала, зависящего от величины изменения частоты и формы напряжения питания сети, который алгебраически суммируется с основным кодом управления. Суммарный код преобразуется соответственно в щирину управляющего импульса, причем закон изменения корректирующего кодового сигнала выбирается таким образом, чтобы статическая характеристика устройства как можно меньще изменялась при флюктуациях частоты и формы напряжения питающей сети. 4 ил. ю со О5 4 ГО
| Батоврин А | |||
| А | |||
| и др | |||
| Цифровые следящие системы судовой автоматики | |||
| Изд-во Судостроение, 1972, с | |||
| Приспособление для удаления таянием снега с железнодорожных путей | 1920 |
|
SU176A1 |
