1
CHTHajiaM с датчиков 1-3 формирователями 4-6 импульсов формируются передние и задние фронты сигналов. Логическая обработка сигналов осуществляется элементами И 10-17, элементами ИЛИ 18-27, дешифраторами 34 и 35. Выделение фронтов сигналов в процессе логической обработки осуществляется формирователями 7 и 9 импульсов. Функции промежуточной
23652А
памяти .обеспечивают триггеры 28-33. Подсчет числа импульсов, соответствующего углу поворота вала рабочего органа, происходит в счетчиках 36 и 37. Устройство обеспечивает формирование корректирующего импульса при пересечении узким лепестком диска зоны визирования датчика в определенной точке пути перемещения рабочего органа. 6 ил.
Изобретение относится к техническим средствам информационных систем и может быть использовано в автоматизированных системах для измерения перемещения и счета предметов, контроля перемещения и положения рабочего органа машины, движущихся в прямом и обратном направлениях.
Цель изобретения - повышение точности контроля перемещения рабочего органа машины за счет формирования корректирующего сигнала, совпадающего с определенным положением контролируемого рабочего органа машины.
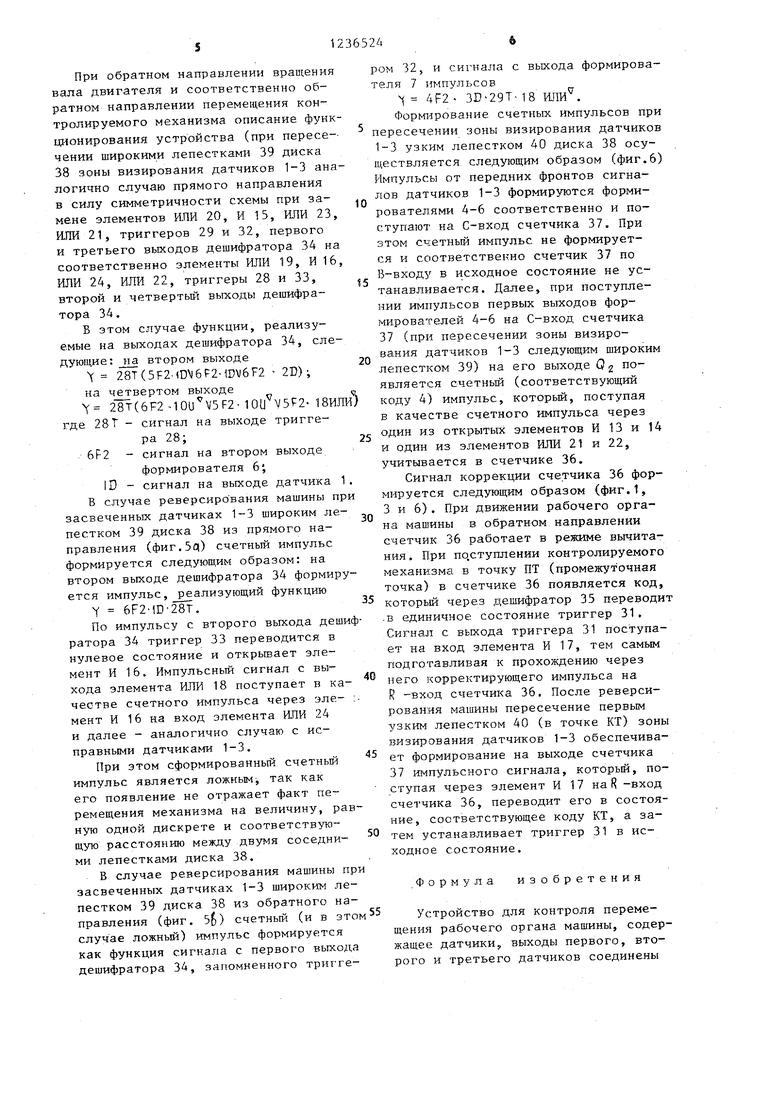
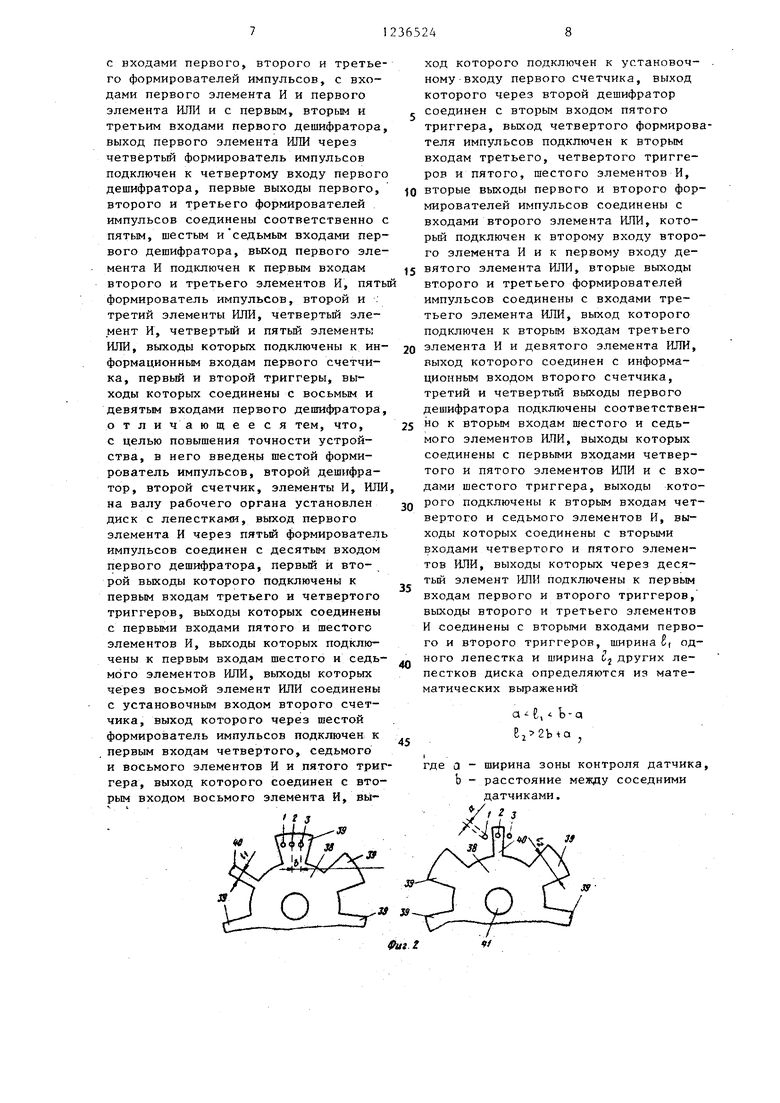
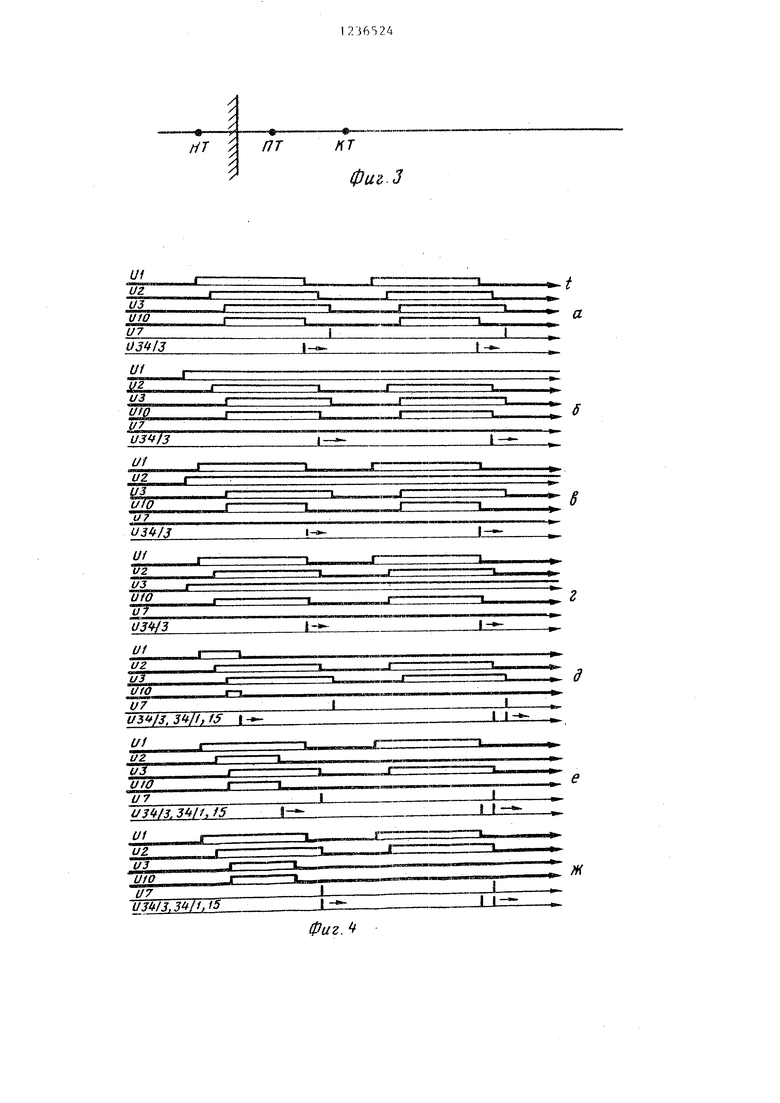
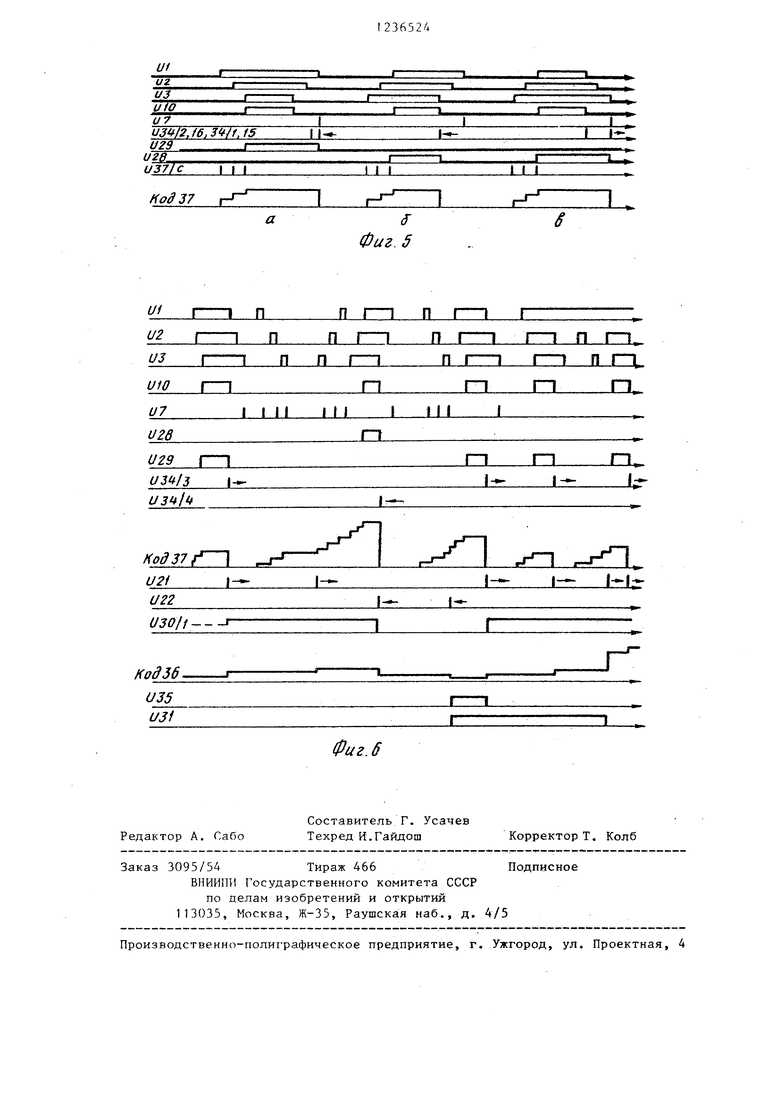
На фиг. 1 изображена блок-схема устройства, на фиг. 2 - диск устройства; на фиг. 3 - диаграмма расположения характерных точек на пути перемещения рабочего органа машиныJ на фиг. 4-6 - временные диаграммы, поясняющие работу устройства.
Устройство содержит первый, второй и третий датчики 1-3, с первого по шестой формирователи 4-9 импульсов, с первого по четвертый элементы И 10-13, седьмой, пятый, шестой и восьмой элементы И 14-17, с первого по седьмой элементы ИЛИ 18-24, десятый, восьмой и девятый элементы ИЛИ 25-27, первый, второй, шестой, пятый, третий и четвертый триггеры 28-33 у первый и второй дешифраторы 34 и 35, первый и второй счетчики 36 и 37.
Кроме того, п устройство входит диск 38 с лепестками 39 и 40, установленный на валу 41 рабочего органа. На диске расположен один узкий лепесток 40, остальные лепестки 39 широкие.
На диаграммах представлены эпюры напряжений У на выходах (входах) элементов. Цифры при букве U соответствуют номерам элементов (фиг.1),
при этом для каждой строки последовательность импульсов соответству- ет порядку расположения цифр при букве и , а стрелка указывает направление, при котором возникают счетные импульсы (слева направо - направление прямое). Применительно к счетчикам 37 и 36 приняты обозначения соответственно Код 37 и Код 36. Характерные точки (фиг.З) выбираются из следующих соображений. Нулевая точка (НТ) выбирается за пределами возможного хода в обратном направлении контролируемого механизма. Нулевой точке соответствует нулевое значение на выходе счетчика 36. Такой выбор нулевой точки исключает появление на выходе счетчика 36 кода, соответствующего области отрицательных значений, при переходе
счетчика через Ноль в режиме вычитания и, таким образом, позволяет формировать на выходе устройства (на выходе счетчика 36) код величины перемещения в положительной области
значений.
Контрольная (КТ) и промежуточная (ПТ) точки выбираются на позициях, предшествующих (при обратном направлении движения) позиции исходного
положения контролируемого механизма. Расстояние между точками КТ и ПТ выбирается, исходя из максимальной величины рассогласования между измеренной и реальной величинами перемещения механизма. В контрольной точке
.
производится коррекция значения счечика 36. При прохождении механизмом промежуточной точки в устройстве формируется сигнал, разреи;ающий продение коррекции счетчика 36,
Устрой ство работает следуюацтм образом.
При вращении вала двигателя, на котором-установлен диск 38, и пересчении широкими лепестками 39 зоны контроля (визирования) датчиков 1-3 на их выходах образуются последовательности перекрывающихся импульсов диаграммы напряжений которых для прямого направления вращения изобра жены на фиг. 4. При этом на первых вьтходах формирователей 4-6 формируют импульсы минимальной длительности о .передних фронтов сигналов соответственно датчиков 1-3, а на вторых выходах - от задних фронтов.
При исправных датчиках 1-3 (фиг. 4flQ сигнал, возникающий на первом выходе формирователя 6, поступая через элемент ИЛИ 20, переводит триг- гер 29 в единичное состояние, так как к моменту появления этого сигнала на один из входов элемента И 12 выставлен единичньй (разрешающий) сигнал с выхода элемента И 10, По заднему фронту сигнала, формирующегося на выходе формирователя 8 импульсов, на третьем выходе дешифратора 34 выделяется импульс счета, который через элементы ИЛИ 23 и 26 сбрасывает счетчик 37 и переводит в единичное состояние (или подтверждает единичное состояние) триггер 30 направления, а через элемент ИЛИ 21 добавляет в счетчик 36 единицу и возвращает через элемент ИЛИ 25 в исходное состояние триггер 29. Функция, реализуемая в данном случае на третьем выходе денгифратора 34 следующая :
4F2-10 J -2 T где 4F2 - сигнал на втором выходе
формирователя 4 импульсов 10U - импульс, формируемый по
заднему фронту сигнала на выходе элемента И 10 формирователем 8 импульсов; 29Т - сиг)ал на выходе триггера 29.
При отказе вида 1 датчика 1 (фиг. 4$ ) и отказе вида О датчика 2 (фиг.4е) в переходном режиме триггер 29 переводится в единичное со
5
(О 5 20
25 зо - j
0
5
5
i 2 44
стояние аналогично случаю с исправным датчиками 1-3. Сигнал счета,фор-. мируемый на третьем выходе дешифратора 34, реализует следующую функцию:
5F2 . 10и 29Г,
где 5F2 - сигнал на втором выходе
формирователя 5 1-п.1пульсов, При отказе вида 1 датчика 2 (фиг.4 о) или 3 (фиг. 42) и при отказе вида О датчика 1 (фнг.4) в переходном режиме порядок срабатывания элементов и функция выходного сигнала на третьем выходе дешифратора 34 аналогичны случаю с исправными датчиками 1-3.
При отказе вида О одного из датчиков 1-3 (фиг.4й,е,А) в установившемся режиме триггер 29 в единичное состояние не переводится, так как элемент И 12 закрыт нулевым сигналом, поступающим с выхода элемента И 10.
Сигнал счета в этом случае формируется следующим образом. На первом выходе дешифратора 34 формируется сигнал, перебрасывающий триггер 32 в нулевое состояние и реализующий следующие функции: при отказе датчика 1 Y ЗГ1-5Р2- 29.Т , где ЗР - сигнал на выходе датчика 3; при отказе датчика 2
- 4F2 3r-29J , где 4F2 - сигнал на втором выходе
формирователя 4; при отказе датчика 3
Y 4F2 - , где 2D - сигнал на выходе датчика 2,
Импульсный сигнал, формирующийся по заднему фронту сигнала на выходе элемента ИЛИ 18 формирователем 7 импульсов, поступает в качестве счетного импульса через открытый триггером 32 элемент И 15 на вход элемента ИЛИ 26 и реализует операции, указанные в случае с исправнььми датчиками 1-3.
При отказе вида О датчика 3 (фиг,4) в переходном режиме выполняются операции аналогично случаю с исправными датчиками 1-3 за исключением того, что на третьем выходе дешифратора реализуется функция
Ч 5F2 - 18 ИЛИ 29Г, где 18 НИИ - импульс, формируемьй
по заднему фронту сигнала на выходе элемента ИЛИ 18 формирователя 7 импульсов.
При обратном направлении вращения вала двигателя и соответственно обратном направлении перемещения контролируемого механизма описание функционирования устройства (при пересе-- чении широкими лепестками 39 диска 38 зоны визирования датчиков 1-3 аналогично случаю прямого направления в силу симметричности схемы при замене элементов ИЛИ 20, И 15, ИЛИ 23, ИЛИ 21, триггеров 29 и 32, первого и третьего выходов дешифратора 34 на соответственно элементы ИЛИ 19, И 16, ИЛИ 24, ИЛИ 22, триггеры 28 и 33, второй и четвертый выходы дешифратора 34.
Б этом случае функдии, реализуемые на выходах дешифратора 34, следующие: на втором выходе
Ч 28T(5F2.(DN6F2-iDV6F2 - 2D); на ч етвертом выходе
2 8T(6F2 -10u V5F2- 10l| V5F2- 18ИЛ где 28 Т - сигнал на выходе триггера 28; 6f-2 - сигнал на втором выходе
формирователя 6;
ID - сигнал на выходе датчика 1 В случае реверсирования машины пр засвеченных датчиках 1-3 широким лепестком 39 диска 38 из прямого направления (фиг.Зч) счетный импульс формируется следующим образом: на втором выходе дешифратора 34 формируется импульс, реализующий функцию
Y 6Р2 Ш 28Г,
По импульсу с второго выхода деширатора 34 триггер 33 переводится в нулевое состояние и открьгоает элемент И 16. Импульсньтй сигнал с выхода элемента ИЛИ 18 поступает в качестве счетного импульса через эле- мент И 16 на вход элемента ИЛИ 24 и далее - аналогично случаю с исправными датчиками 1-3.
При этом сформированный счетный импульс является ложным так как его появление не отражает факт перемещения механизма на величину, равную одной дискрете и соответствующую расстоянию между двумя соседними лепестками диска 38.
В случае реверсирования машины пр засвеченных датчиках 1-3 широким лепестком 39 диска 38 из обратного направления (фиг. 5) счетный (и в это случае ложный) импульс формируется как функция сигнала с первого выхода дешифратора 34, запомненного тригге
0
S
0
5
5
0
5
0
ром 32, и сигнала с выхода формирователя 7 импульсов
4F2- 3D 29T-18 ИЛИ. Формирование счетных, импульсов при пересечении зоны визирования датчиков 1-3 узким лепестком 40 диска 38 осуществляется следующим образом (фиг.6) 1 1мпульсы от передних фронтов сигналов датчиков 1-3 формируются формирователями 4-6 соответственно и поступают на С-вход счетчика 37, При этом счетный импульс не формируется и соответственно счетчик 37 по В-ВХОДУ в исходное состояние не устанавливается. Далее, при поступлении импулгзсов первых выходов формирователей 4-6 на С-вход счетчика 37 (при пересечении зоны визирования датчиков 1-3 следующим широким лепестком 39) на его выходе Q появляется счетный (соответствующий коду 4) импульс, которьм, поступая в качестве счетного импульса через один из открытых элементов И 13 и 14 и один из элементов ИЛИ 21 и 22, учитывается в счетчике 36.
Сигнал коррекции счетчика 36 формируется следующим образом (фиг.1, 3 и 6) . движении рабочего органа машины в обратном направлении счетчик 36 работает в режиме вычитания. При по.ступлении контролируемого механизма в точку ПТ (промежуточная точка) в счетчике 36 появляется код, которьй через дешифратор 35 переводит .в единичное состояние триггер 31, Сигнал с выхода триггера 31 поступает на вход элемента И 17, тем самым подготавливая к прохождению через него корректирующего импульса на R -вход счетчика 36, После реверсирования машины пересечение первым узким лепестком 40 (в точке КТ) зоны визирования датчиков 1-3 обеспечивает формирование на выходе счетчика 37 импульсного сигнала, который, поступая через элемент И 17 наR -вход счетчика 36, переводит его в состояние, соответствующее коду КТ, а затем устанавливает триггер 31 в исходное состояние.
Формула изобретения
Устройство для контроля перемещения рабочего органа машины, содержащее датчики, выходы первого, второго и третьего датчиков соединены
с входами первого, второго и третьего формирователей импульсов, с входами первого элемента И и первого элемента ИЛИ и с первым, вторым и третьим входами первого дешифратора, выход первого элемента ИЛИ через четвертый формирователь импульсов подключен к четвертому входу первого дешифратора, первые выходы первого, второго и третьего формирователей импульсов соединены соответственно с пятым, шестым и седьмым входами первого дешифратора, выход первого элемента И подключен к первым входам второго и третьего элементов И, пять формирователь импульсов, второй и . третий элементы ИЛИ, четвертьй элемент И, четвертый и пятьй элементы ИЛИ, выходы которых подключены к информационным входам первого счетчика, первый и второй триггеры, выходы которых соединены с восьмым и девятым входами первого дешифратора, отличающееся тем, что, с целью повышения точности устройства, в него введены шестой формирователь импульсов, второй дешифратор, второй счетчик, элементы И, ИЛИ на валу рабочего органа установлен диск с лепестками, выход первого элемента И через пятый формирователь импульсов соединен с десятым входом первого дешифратора, первый и второй выходы которого подключены к первым входам третьего и четвертого триггеров, выходы которых соединены с первьми входами пятого и шестого элементов И, выходы которых подключены к первым входам шестого и седьмого элементов ИЛИ, выходы которых через восьмой элемент ИЛИ соединены с установочным входом второго счетчика, выход которого через шестой формирователь импульсов подключен к первым входам четвертого, седьмого и восьмого элементов И и пятого трнг reipa, выход которого соединен с вторым входом восьмого элемента И, выЧ 3
„ -да «tf
10
15
20
5
0
5
0
5
ход которого подключен к установочному входу первого счетчика, выход которого через второй дешифратор соединен с вторым входом пятого триггера, выход четвертого формирователя импульсов подключен к вторым входам третьего, четвертого триггеров и пятого, шестого элементов И, вторые выходы первого и второго формирователей импульсов соединены с входами второго элемента ИЛИ, кото- рьм подключен к второму входу второго элемента И и к первому входу девятого элемента ИЛИ, вторые выходы второго и третьего формирователей импульсов соединены с входами третьего элемента ИЛИ, выход которого подключен к вторым входам третьего элемента И и девятого элемента ИЛИ, выход которого соединен с информационным входом второго счетчика, третий и четвертый выходы первого дешифратора подключены соответственно к вторым входам шестого и седьмого элементов КОИ, выходы которых соединены с первыми входами четвертого и пятого элементов ИЛИ и с входами шестого триггера, выходы которого подключены к вторым входам четвертого и седьмого элементов И, выходы которых соединены с вторыми входами четвертого и пятого элементов ИЛИ, выходы которых через десятый элемент ИЛИ подключены к первым входам первого и второго триггеров, выходы второго и третьего элементов И соединены с вторыми входами первого и второго триггеров, ширина , одного лепестка и ширина Oj других лепестков диска определяются из математических выражений
а , Ь-а + а J
где а - ширина зоны контроля датчика, b - расстояние между соседними датчиками.
/. г 3
.5 //
ut.Z
Фиг. 6
Редактор А, Сабо
Составитель Т. Усачев Техред И.Гайдош
Заказ 3095/54Тираж 466Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Т, Колб
| название | год | авторы | номер документа |
|---|---|---|---|
| Резервированное устройство для управления перемещением объекта | 1982 |
|
SU1067468A1 |
| Устройство для управления петельным полуавтоматом | 1987 |
|
SU1420088A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1698990A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1124349A1 |
| Устройство для контроля перемещения рабочего органа машины | 1981 |
|
SU993300A1 |
| Устройство для управления маркером на экране электронно-лучевой трубки | 1987 |
|
SU1501133A1 |
| ЦИФРОВОЙ МОДУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2517423C1 |
| Датчик тока гармоники параллельного резонанса | 1987 |
|
SU1471140A1 |
| Устройство для моделирования систем массового обслуживания | 1987 |
|
SU1481790A1 |
Изобретение относится к техни- . ческим средствам информационных систем и может быть использовано в автоматизированных системах для измере- ния перемещения и счета предметов,контроля перемещения и положения рабочего органа машины, движущихся в прямом и обратном направлениях. Устройство обладает высокой точностью за счет формирования корректирующего сигнала, совпадающего с определенным положением контролируемого рабочего органа машины. На валу рабочего органа установлен диск с лепестками, один из которых перекрывает лишь один датчик, а остальные по три сразу. По о Q (Л с: к со GD сл 1C 4
| Устройство для контроля перемещения рабочего органа машины | 1980 |
|
SU926698A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для контроля перемещения рабочего органа машины | 1981 |
|
SU993300A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
