Изобретение относится к области автоматики и может быть использовано при решениизадач автоматизации управления транспортными операциями, например при перемещении заготовок по секционированному рольгангу, при загрузке и выгрузке печи прокатного стана и как фотореле при перемещении изделий на конвейерном транспорте.
Известно устройство для учета перемещающихся изделий, содержащее первый и второй постоянно включенные датчики наличия объекта, первый - третий и второй-четвертый одновиб.раторы; входы которых соединены с выходами первого и второго датчиков наличия объекта (указанные пары одновибраторов образуют известные схемы так называемых двухфазных одновибраторов), элемент задержки, индикатор отказа, первый и второй элементы И, счетный триггер, элемент ИЛИ и формирователь управляющих импульсов .5.
Недостаток устройства в том, что информационный сигнал, поступающий в формирователь управляющих импульсов, неоднозначен, так как он в зависимости от режима работы устройства или вида отказа одного из датчиков наличия объекта отображает либо передний, либо,задний торец перемещающегося объекта. Это понижает точность управления перемещением объектов, так как управляющий сигнал, формируемый в формирователе управляющих сигналов, будет соответственно неоднозначен, что приводит к некомпенсируемой ошибке, равной длине объекта и возникающей случайно, в определении положения объекта на технологической линии, вследствие чего не исключается возможность возникновения аварийных ситуаций и поломок оборудования.
Наиболее близким по технической сущности и достигаемому эффекту к предложенному является устройство для управления перемещением объекта, содержащее первый и второй двухфазные одновибр азрры, входы которых подключены к выходам соответствующих датчиков наличия объекта, первые выходы - к первым входам первого элемента ИЛИ, а вторые выходы - к первым входам соответственно первого и второго элементов И подключенных выходами к входам индикатора отказа, а вторыми входами через элемент задержки к вьЬсоду счетного триггера и к первс 1у входу фо{ 1ирования управлянядих импульсов, третий и четвертый элементы И, второй и третий элементы ИЛИ и триггер с динамическим входом, вход которого соединен с BTOIM JM входом формирователя управляющих импульсов и через третий элемент ИЛИ - с выходами первого и второго элементов И, выход третьего элемента И подключен к входу счетного- триггера, первый вход - к выходу первого элемента ИЛИ, а второй вход - к выходу формирователя управляющих импульсов и к первому входу четвертого элемента И, второй вход которого соединен с выходом триггера с динамическим входом, третий вход через второй элемент ИЛИ - с вторыми входами первого и второго двухфазных одновибраторов, а выход с .вторым входом первого элемента ИЛИ. Устройство работает еле- дующим образом. Если оба датчика наличия объекта исправны или произошел отказ вида единица одного из них, проявляющийся в виде преждевременной, следовательно, ложной выдачи сигнала Передний фронт входного сигнала на первом выходе соответствующего одновибратора, то переход счетного триггера в исходное состояние используется устройством как информационный сигнал, который в формирователе управляющих импульсов преобразуется в искомый информационный сигнал, отображая пересечение линии визирования датчиков передним торцом перемещающегося реального объекта. В сл5лчае отказа вида нуль одного из датчиков, проявляющегося в виде ложной невыдачи сигнала Передний фронт входного сигнала на первом выходе соответствующего одновибратора, IB формирователе управляющих импульсов вырабатывается предварительный управляющий сигнал Реверс
по которому выполняется останов, затем перемещение объекта в обратном направлении, снова останов и
вновь перемещение объекта в заданном прямом направлении. В момент пересечения линии визирования датчиков передним торцом объекта, повторно перемещающегося в заданном
прямом направлении, как и ранее
переход счетного триггера в исходное устойчивое состояние преобразуется (формирователем управляющих иютульсов в управлякнций сигнал, отображающий исходный передний торец реального объекта, в процессе перемещения которого произошел отказ вида нуль одного из датчиков наличия объекта, а в процессе его маневрирования известное устрсЛство перестроилось на режим работы с одним исправным узлом t2.,
Недостатком уст1х йства являются ограниченные функциональные возможности при решении задач управления
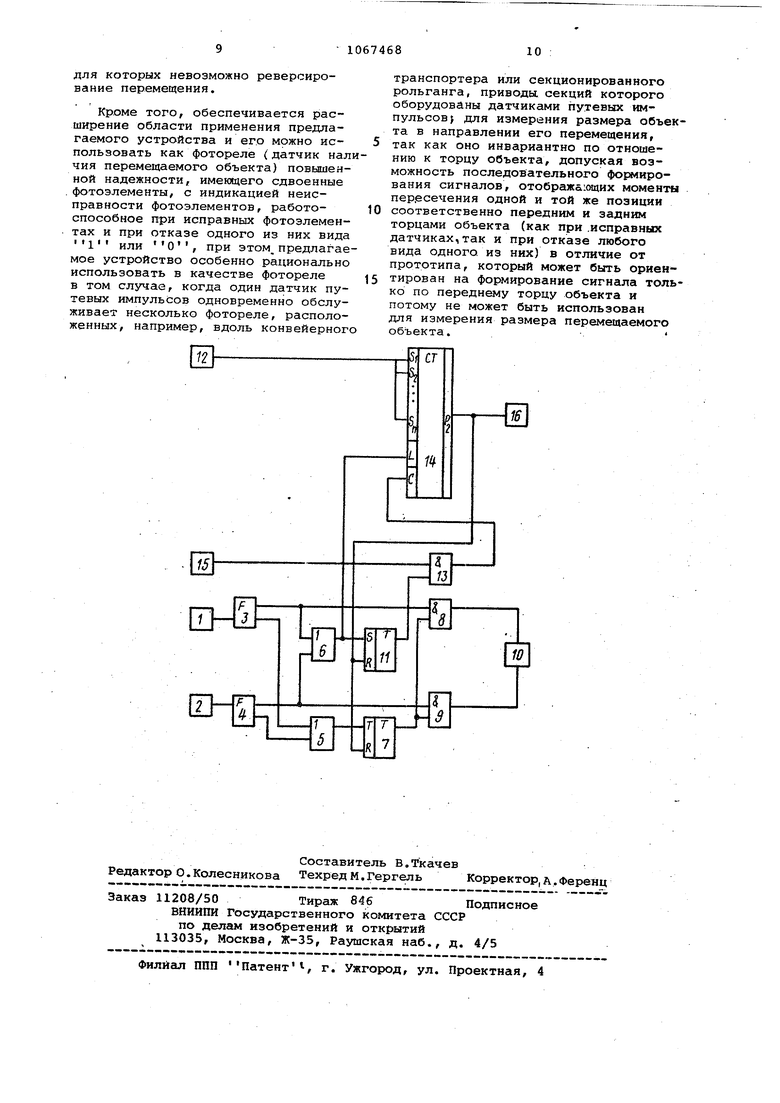
транспортными операциями. Так его реализация возможна,если оборудование обеспечивает двухсторонне перемещение объекта (реверсивный привод), например рольганги, экстр торы-механизмы выдачи заготовок из печи, шагающие балки в печах и др. (обычно механизмы, несущие на себе объект), и невозможна, если оборудование приспособлено для перемещения объекта только в одном направлении, например посад заготовки в печь посредством печного толкателя; перемещение объекта по склизу при выгрузке печи; пе ремещение объекта в потоке объектов, пример, по секционированному рольГангу, когда маневрирование объ та с применением реверсирования механизма транспортирования недоп тимо. . Цель изобретения - расширение функциональных возможностей устрой ства за счет управления перемещением объектов, для которых невозможно реверсивное перемещение. Поставленная цель достигается тем, что в резервированное устройство для управления перемещением объекта, содержащее первый и второй двухфазные одновибраторы, вход которых подключены К выходам датчиков нгшичия объекта, первые выходы - к входам первого элемента ИЛИ, а вторые выходы - к первым вх Дс1м соответственно перврго и второ элементов И, подключенных выходами к входам индикатора отказа, второй элемент ИЛИ,,третий элемент И, пер вым входом подключенный к выходу Й.5-триггера, счетный триггер и фор мирователь управляющих импульсов, дополнительно введены датчик перемещения объекта, задатчик кода задержки и счетчик, парвым входом по ключенный к выходу третьei o элемента И, вторым входом - к выходу второго элемента ИЛИ и к первому входу RS -триггера, третьим входом к задатчику кода задержки, а выходом - к входу формирователя управлякядих импульсов и к вторым входам RS-триггера и счетного триггера, выходом подключенного к вторым вхо лгм первого и второго элементов И, 1а первым входом - к выходу первого элемента ИЛИ, входам второго элемен та ИЛИ подключены к вторым выходам первого и второго двухфазных одновибраторов , а второй вход третьего элемента И соединен с выходом датч ка перемещения объекта. Введение дaтчиka перемещения 1О0ъекта, подключенного к вторс 4у в ;ду третьего элемента И, и подключение входов второго элемента ИЛИ первым входам одновибраторов, а вы хода 7- к первому входу Й8 -триггера позволяет в процессе перемещения объекта выделить серию путевых ймиульсов третьим элементом И, который открывается при переходе RS-триггера в состояние единица . Переход 3--триггера в указанное состояние осуществляется по одному из сигналов Передний фронт входного сигнала, формируемых на первых выходах одновибраторов в момент пересечения линии визирования датчиков наличия объекта передним торцом объекта. Введение задатчика кода и счетчика, работакицего в режиме вычитания, первым входом подключенного к выходу третьего элемента И, ВТОЕЯЛМ входом - к выходу второго элемента ИЛИ, а третьим входом - к выходу за датчика кода задержки, позволяет в процессе перемещения объекта сформировать управляющий сигнал следующим образом. При отказе вида единица одного из датчиков наличия объекта по ложному сигналу Передний фронт входного сигнала (возникающему на выходе второго элемента ИЛИ ранее момента пересечения передним торцом объекта линии визирования датчиков наличия объекта и посту- пающему на второй вход, счетчика) разрешается из задатчика кода за- .держки в счетчик по третьему входу параллельным кодом переписать код длины, соответствующий длине участка исходная позиция объекта - линия визирования датчиков , причем в данном .гримере координата исходной позиции объекта определяется по переднему торцу объекта. Кроме того, по указанному сигналу RS -триггер переходит в единицу , открывая третий элемент И для поступления серии путевых импульсов на первый вход счетчика, работающего в режиме вычитания. По мере перемещения объекта код счетчика стремится к нулевому зна|чению, однако появление на выходе jBToporo элемента ИЛИ следующего, уже истинного сигнала Передний 1фронт входного- сигнала (выдаваемого неотказавшим датчиком наличия объекта в момент пересечения передним торцом объекта линии визирования датчиков) f- позволяет повторно перезаписать в счетчик указанный код длины. В момент достижения передним тором объекта контрольной позиции, тстоящей в направлении перемещеия объекта от линии визирования атчиков на расстоянии, равном длине частка исходная позиция объекталиния визирования датчиков, счетчик , работающий в режиме вычитания, обнуляется. Сигнал обнуления счетчика, посту пая в формирователь управляющих импульсов, преобразуется в искомый управляющий сигнал, а поступая на второй вход RS-триггера, переводит последний в исходное состояние. При исправных датчиках наличия объекта аналогично предыдущему случаю управляющий сигнал формируется при достижении передним торцом объе та контрольной позиции с той лишь разницей, что оба сигнала Передни фронт входного сигнала являются истинными, отображая пересечение передним торцом объекта линии визирования датчиков, так как практи чески датчики имеют общую линию визирования. При отказе вида нуль одного из датчиков наличия объекта формирование управляющего сигнала осуществляется при однократной перезаписи в счетчик кода контрольной длины в момент пересечения передним торцом объекта контрольной позиции Таким образом, искомый управляющий сигнал в предлагаемом устройстве однозначно отображает всегда один и тот же (в данном примере передний) торец перемещаемого объек та и всегда при достижении этим тор цом одной и той же позиции (контрол ной) независимо от режима работы предлагаемого устройства, т.е. о .одним или двумя исправными Снеотказавшими) датчиками наличия объекта Однако в отличие от прототипа получение необходимого результата с помощью предлагаемого устройства не требует маневрирования объектом в случае отказа одного из датчиков наличия объекта, что расширяет его функциональные возможности, когда технологически допустимо только одностороннее перемещение объекта, например, при помещении заготовки 3 нагревательную печь посредством печного толкателя; при перемещении объекта по склизу при выгрузке печи; при транспортировании объе та по секционированному рольгангу в потоке объектов. На чертеже изображена блок-схема .устройства. Устройство содержит первый и вто рой датчики наличия объекта 1 и 2, первый и второй двухфазные одновибраторы 3 и 4, входы которых подключены к выходам соответствующих датчиков 1 и 2, первый и второй элементы ИЛИ 5 и 6, первыми и вторыми входами, подключенные соответственно к первым и вторым выходам од новибрагоров 3 и 4, счетный триггер 7, первым входом подключенный к вы ходу элемента ИЛИ 5, первый и второй элементы И 8 и 9, первыми зходами подключенные к вторым выходам соответственно первого и второго одновибраторов 3 и 4, индикатор 10 отказа, входами подключенный к выходам первого и второго элементов И 8 и 9, ИЗ -триггер Л, первым входом подключенный к выходу второго элемента ИЛИ 6, задатчик 12 кода.задержки, третий элемент И 13, первым входом подключенный к выходу ftSтриггера 11, счетчик 14, первым входом подключенный к выходу третьего элемента И 13, вторым входом - к выходу второго элемента ИЛИ 6, третьим входом - к выходу задатчика 12, а выходом - к вторым входам триггеров 7 и 11, датчик 15 перемещения объекта, подключенный к второму входу третьего элемента И 13, формирователь 16 управляющих импульсов, подключенный к выходу счетчика 14. Устройство работает следующим образом. При пересечении линии визирования датчиков 1 и 2 передним и задним торцами объекта одновибраторы 3 и 4 формирует импульсные сигналы минимальной длительности - Передний фронт входного сигнала и Задний фронт входного,сигнала соответственно. . Если оба датчика 1 и 2 исправны, то на вход триггера 11 и второй вход (разрешения записи кода задатчика) счетчика 1 I через элемент ИЛИ 6 последовательно поступают два сигнала Передний фронт входного сигнала с первых выходов одновибраторов 3 и 4, отображающих пересечение передним торцом перемещаемого объекта линии визирования датчиков. По первому сигналу Передний фронт входного сигнала, поступающему на второй вход счетчика 14, разрешается перезапись кода задатчика 12, в счетчик 14 по третьему (установочному) входу параллельным кодом переписывается код длины, равной длине участка исходная позиция объекта - линия визирования датчиков, триггер 11 пеЕзеводится в единицу, открывая третий элемент И 13 для поступления серии путевых импульсов на первый (счетный) вход счетчика 14, работающего в режиме вычитания. После появления второго сигнала Передний фронт входного сигнала на первом выходе одновибратора 4 из задатчика 12 в счетчик 14 повторно переписывается прежняя информация о длине. Триггер 11 сохраняет свое состояние. Элемент И 13 остается открытым и в счетчик 14 начинает поступать новая серия путевых импульсов по мере перемещения объекта. В момент достижения передним торцом объекта контрольной позиции, отстрящей в направлении перемещени объекта от линии визирования датчи ков на расстоянии, равном длине указанного участка, счетчик 14 обн ляется. Сигнал обнуления счетчика 14, поступая в формирователь 16, преоб разуется в управлянвдий сигнал, а поступая на второй вход триггера 1 переводит последний в исходное сое тояние. При отказе вида единица одного из датчиков 1 и 2 алгоритм функционирования элементов - триггера 11, задатчика 12, третьего эл мента И 13 и счетчика 14, является аналогичньдм случаю исправных блоков 1 и 2, так как в обоих случаях возникает два сигнала Передний фронт входного сигнала. Отличие заключается только в том, что при отказе вида единица первый по счету сигнал, полученный на выходе второго элемента ИЛИ 6, является ложным, ибо он возникает ранее момента пересечения передним торцетл объекта линии визирования датчиков, т.е. еще тогда, когда передни торец объекта занимает промежуточную позицию на участке исходная позиция объекта-линия визирования датчиков. Второй сигнал Передний фронт входного сигнала является истинным и возникает на выход второго элемента ИЛИ 6 в момент пересечения передним торцом объекта 1инии визирования датчиков. При отказе вида нуль одного из датчиков 1 или 2 формирование у равляющего сигнала осуществляется при однократной перезаписи в счетчик 14 кода контрольной длины в мо мент пересечения передним торцом объекта контрольной позиции. При отказе вида нуль. (ложная невыдача сигнала), кроме того, выявляется отказавший датчик 1 или 2, так как триггер 7 по сигналу Передний фронт входного сигнала .неоткаэавшего датчика переходит единицу, открывая элементы И 8 и 9. Так как при отказе вида нуль, например датчика 1, навыходе элемента И 9 появляется сигнал Задний фронт входного сигнала, полученный на втором выходе одновибратора 4, Появление этого сигнала на первом входе индикатора 10 свидетельствует об исправности датчика 2 и факте отка ,ида йуль датчика 1. Однако в случае отказа одного из датчиков 1 или 2 вида единица отказавишй датчик выявляется не сразу, т.е. не в том цикле управления пер мещением объекта, в котором случилс.я отказ, а в последующем управления, когда отказ проявляется уже как вида нуль . Однако такого рода запоздание в выявлении Отказавшего датчика не снижает надежность предлагаемого устройства, рассматриваемого как дублированная восстанавливаемая система, поскольку интервал поступления объектов (в потоке объектов) в зону действия датчиков 1 и 2 существенно меньше допустимого времени восстановления (замены) отказавшего блока. Следует подчеркнуть, что формирование управляющего сигнала с некоторой транспортной задержкой относительно линии визирования датчиков не имеет существенного значения, так как при решении задачи автоматизации управления транспортными операг циями линия визирования датчиков может быть расположена с упреждением. При этом по расстоянию упреждение должно быть не менее длины участка исходная позиция объекта - линия визирования датчиков в случае формирования управляющего сигнала, соответствующего пересечению линии визирования датчиков передним торцом объекта, и не менее максимально ВОЗможного размера объекта из числа контролируемого сортамента объектов в случае формирования управляющего сигнала, соответствующего пересечению линии визирования датчика задним торцом объекта. Введение в предлагаемое устройство датчика- нового типа, а именно датчика перемещения объекта,не снижает надежности устройства в целом, так как в качестве датчика импульсов можно использовать достаточно надежные известные резервированные устройства для счета импульсов. Таким образом, формирование управляющего сигнала в предлагаемом устройстве с транспортной задержкой относительно линии визирования датчиков позволяет в отличие от прототИпа исключить маневрирование объектом в случае отказа одного из датчиков наличия объекта, что расширяет функциональные возможности предлагаемого устройства, позволяя использовать его тогда, когда технологическое оборудование приспособлено для перемещения объекта только в одном направлении. Основным технико-экономическим преимуществом при реализации резервиров.анн6го устройства управления перемещением .объекта по сравнению с прототипом является- исключение простоев оборудования вследствие расширения функциональных возможностей предлагаемого устройства за счет управления перемещением объектов. для которых невозможно реверсирование перемещения. Кроме того, обеспечивается расширение области применения предлагаемого устройства и его мржно использовать как фотореле (датчик нал чия перемещаемого объекта) повышенной надежности, имеющего сдвоенные фотоэлементы, с индикацией неисправности фотоэлементов, работоспособное при исправных фотоэлементах и при отказе одного из них вида , при этом, предлагае мое устройство особенно рационально использовать в качестве фотореле в том сл5чае, когда один датчик путевых импульсов одновременно обслуживает несколько фотореле, расположенных, например, вдоль конвейерног транспортера или секционированного рольганга, приводы секций которого оборудованы датчиками путевых импульсов для измерения размера объекта в направлении его перемещения, так как оно инвариантно по отношению к торцу объекта, допуская возможность последовательного формирования сигналов, отобража;ощих моменты пересечения одной и той же позиции соответственно передним и задним торцами объекта (как при .исправных датчиках,так и при отказе любого вида одного, из них) в отличие от прототипа, который может быть ориентирован на формирование сигнала только по переднему торцу объекта и потому не может быть использован для измерения размера перемещаемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство для контроля перемещения рабочего органа машины | 1984 |
|
SU1236524A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Способ управления безупорным остановом перемещаемой заготовки и устройство для его осуществления | 1986 |
|
SU1407603A1 |
| Устройство для контроля перемещений рабочего органа машины | 1985 |
|
SU1282175A1 |
| Устройство для учета перемещаемых изделий | 1988 |
|
SU1513490A1 |
| Устройство для учета перемещающихсяиздЕлий | 1979 |
|
SU849256A1 |
| Устройство для счета импульсов | 1982 |
|
SU1065867A1 |
| Устройство для контроля выдачи заготовок | 1981 |
|
SU987650A1 |
РЕЗЕРВИРОВАННОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ОБЪЕКТА, содержащее первый и второй двухфазные одновибраторы, входы которйлх подключены к выходам датчиков нешичия объекта, первые выходы - к входам первого элемента ИЛИ, вторые выходы - к первым входам соответственно первого и второго элементов И, подключенных выходгми к входам индикатора отказа, второй элемент ИЛИ, третий элемент И, первым входсм подключенный к выходу OS -триггера. счетный триггер и формирователь управляющих импульсов, отличающееся тем, что, с целью расширения функциональных возможностей за счет управления перемещением объектов, для которых невозможно реверсирование перемещения, в него введены датчик перемещения объекта, задатчик кода защержки и счетчик, подключенный первых входом к выходу третьего элемента И, вторым входом - к выходу второго элемента ИЛИ и к первому входу 1XSтриггера, третьим входо - к задат чику кода задержки, а выходом - к входу формирователя управляющих сигнгшов и к вторым входам R.S-тригг гера и счетного триггера, выход которого подключен к вторым входам первого и второго элементов И, первый вход - к выходу первого элемента ИЛИ, входы второго элемента ИЛИ подключены к вторым вьрсодам первого и второго двухфазных одно- вибраторов, а второй вход третьего элемента И соединен с выходом датчика перемещения объекта. О vl 4i 0: эо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для учета перемещающихся изделий | 1978 |
|
SU792274A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР №852079, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
