fуменьшения) частоты из условия допустимых перенапряжений на силовых элементах ПЧ 1 и соответствующее это му режиму ограничение скольжения двигателя в генераторном режиме. Состоя- ime выходного сигнала СТ t1 задается
Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводом с широтно-. импульсным регулированием выходного напряжения, и может быть использовано в различных отраслях промьшленности: химической, горнодобывающей, металлургической и других, для управления торможением частотно-регулируемого асинхронного двигателя,
Цель изобретения - сокращение вре мени торможения.
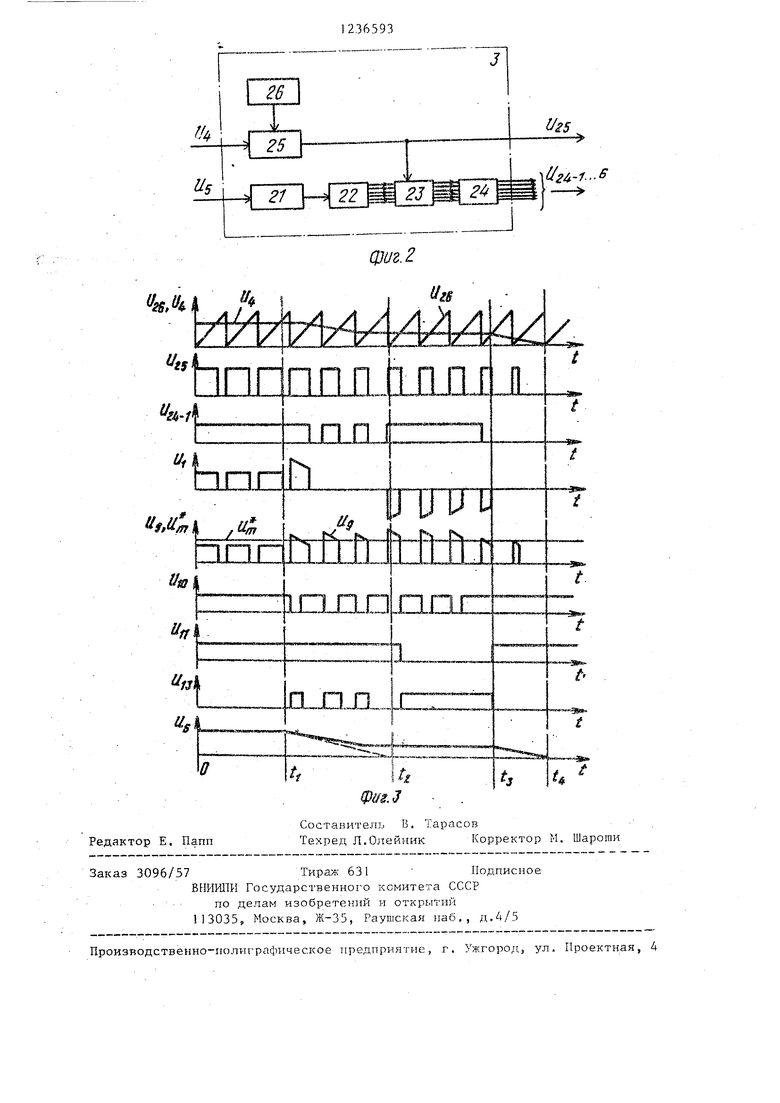
На фиг,1 приведена функциональная схема устройства для управления торможением частотно-регулируемого злек тропривода; на фиг, 2 - функциональная схема системы управления преобразователем; на фиг. 3 - временные диаграммы работы устройства.
Устройство для управления тормо- лсением частотно-регулируемого электропривода содержит преобразователь 1 частоты с широтно-импульсным регулированием выходного напряжения, подсоединенный выходом к асинхронному дви- гателю 2, а входом через систему управления преобразователем 3 - к выходам блоков управления 1 апряжением 4 и частотой 5, задатчик 6 интенсивности, подклгочепнь Й одним из своих
входов к выходу пульта 7 управления, другим входом к выходу ключевого элемента 8, а выходом - ко входам блоков управления напряжением 4 и частотой 5, датчик 9 напряжения дви- гателя, подключенный выходом к входу компаратора 10, синхронный триггер 11, первый и второй логические эле- ;менты типа И-НЕ 2 и 3„ При этом синхронный триггер 1 подк:тчен пер- вым входом непосредственно, а вторым входом через первый логический эле- мент И-НЕ- 12 к выходу компаратора 0 третьим стробирующим входом синхронсигналами К 10 и ЛЭ 12, а разрешением на изменение состояния СТ 1 служит динамическое изменение на стробирую- щем входе сигнала СУ 3, который совпадает с окончанием проводящего состояния тиристоров ПЧ 1, 3 ил.
5
0
0
5 0
ный триггер I1 подсоединен к выходу модулятора ширины импульсов в системе управления преобразователем 3, а своим выходом - к первому входу второго логического элемента И-НЕ 13, связанного вторым входом с выходом компаратора 10, а выходом - с входом ключевого злемента 8, Преобразователь 1 частоты состоит из последовательно соединеных неуправляемого нереверсивного выпрямителя 14, сглаживающего фильтра 15 и автономного инвертора 16 напряжения с широтно-им- пульс:ным регулированием выходного напряжения, Задатчик 6 интенсивности содержит последовательно включенные компаратор 17 и интегратор 18, а датчик 9 напряжения двигателя - последовательно соединенные трансформатор 19 напряжения и схему 20 вьтрямления, I
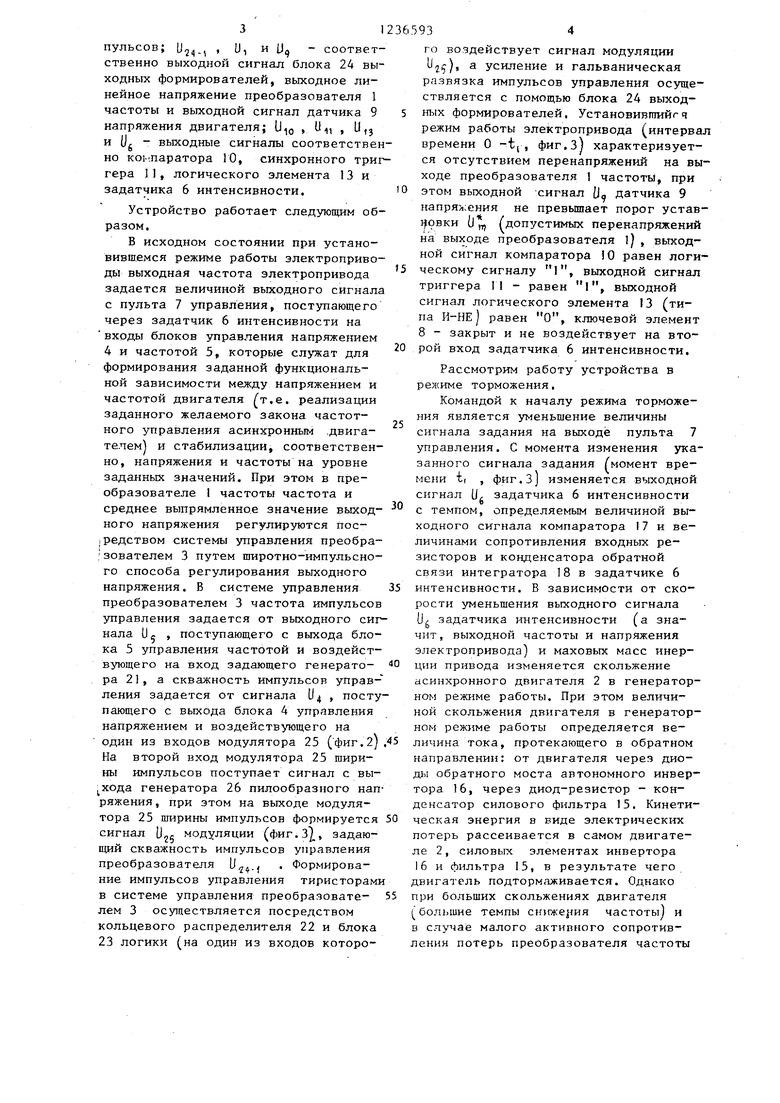
Функциональная схема системы управления преобразователем 3 (фиг,2) содержит последовательно соединенные задающий генератор 21 , кольцевой счетчик 22, блок 23 логики и блок 24 выходных формирователей, причем второй вход блока 23 логики связан через модулятор 25 ширины импульсов с выходом генератора 26 пилообразного напряжения и является вторым выходом системы управления преобразователем 3, а вход задающего генератора 21, второй вход модулятора 25 ширины импульсов и выход блока 24 выходных формирователей являются соответственно двумя входами и первым выходом системы управления преобразователем 3.
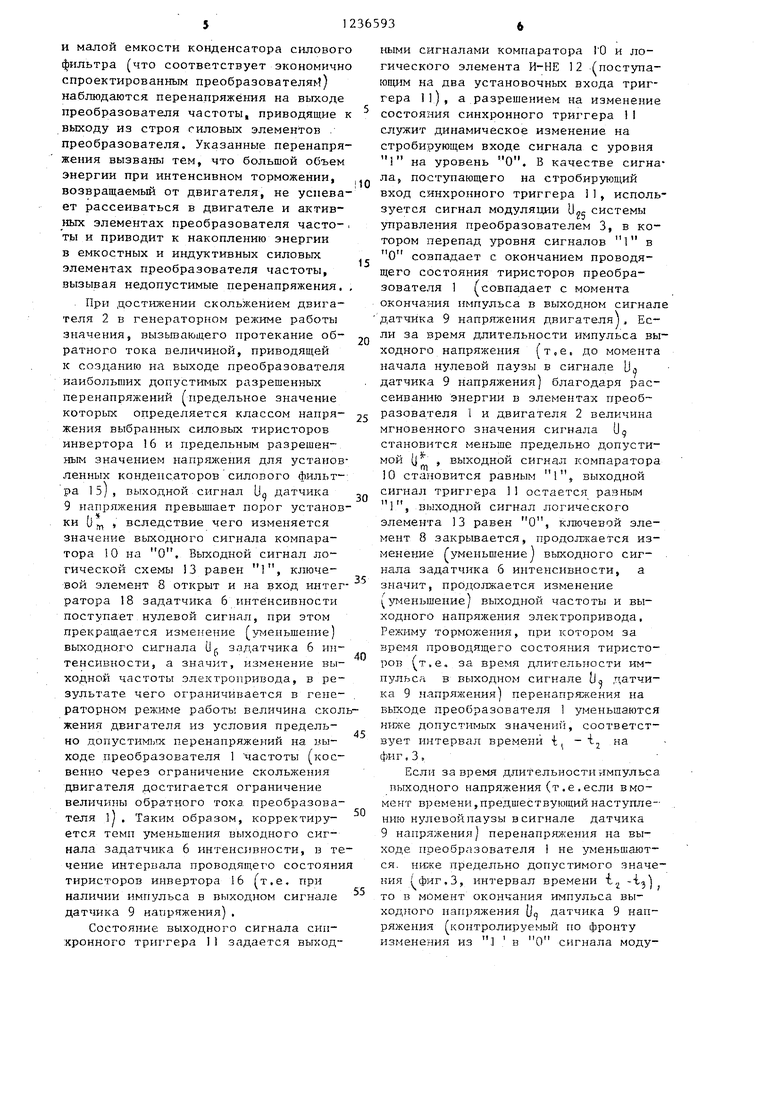
На фиг. 3 приведены временные диаграммы работы устройства, где , и4 и Ujr - выходные сигналы соответственно генератора 26 пилообразного напряжения, блока 4 управления нап- ряжершем и модулятора 25 ширины им10
20
пульсов; U24M 1 Ug соответственно выходной сигнал блока 24 выходных формирователей, выходное линейное напряжение преобразователя 1 частоты и выходной сигнал датчика 9 напряжения двигателя; U ц , U, и Ug - выходные сигналы соответственно ко1-ларатора 10, синхронного триггера 11, логического элемента 13 и задатчика 6 интенсивности.
Устройство работает следующим образом.
В исходном состоянии при установившемся режиме работы электроприводы выходная частота электропривода задается величиной выходного сигнала с пульта 7 управления, поступающего через задатчик 6 интенсивности на входы блоков управления напряжением 4 и частотой 5, которые для формирования заданной функциональной зависимости между напряжением и частотой двигателя т.е. реализации заданного желаемого закона частотного управления асинхронным .двигателем) и стабилизации, соответственно, напряжения и частоты на уровне заданных значений. При этом в преобразователе I частоты частота и среднее выпрямленно.е значение выходного напряжения регулируются пос- редством системы управления преобра- зователем 3 путем широтно-импульсно- го способа регулирования выходного напряжения. В системе управления 35 преобразователем 3 частота импульсов управления задается от выходного сигнала и с ) поступающего с выхода блока 5 управления частотой и воздействующего на вход задающего генерато- О ра 21, а скважность импульсов управ- ления задается от сигнала U , поступающего с выхода блока 4 управления напряжением и воздействующего на
25
30
го воздейст усил развязка имп ствляется с формиров режим работы времени О -t ся отсутстви ходе преобра этом выходно напряжения j /д на выходе пр ной сигнал к 5 ческому сигн триггера II сигнал логич па И-НЕ рав 8 - закрыт и рой вход зад
Рассмотри релсиме тормо
Командой ния является сигнала зада управления. занного сигн мени t( , фи
один из входов модулятора 25 ( фиг.2) .45 личина тока, На второй вход модулятора 25 ширины импульсов поступает сигнал с вы- хода генератора 26 пилообразного напряжения , при этом на выходе модулятора 25 ширины импульсов формируется 50 сигнал Ujc модуляции (фиг.З), задаюий скважность импульсов управления преобразователя .f Формирование импульсов управления тиристорами в системе управления преобразовате- 55 ем 3 осуществляется посредством кольцевого распределителя 22 и блока 23 логики (на один из входов которосигнал и, за с темпом, оп ходного сигн личин 1ми соп зисторов и к связи интегр интенсивност рости уменьш и задатчика чит , выходно электроприво привода асинхронного ном режиме р ной скольжен ном реж11ме р
направлении: ды обратного тора 16, чер денсатор сил ческая энерг потерь рассе ле 2, силовы 16 и фильтра двигатель по при больших (большие тем в случае мал ления потерь
10
20
35 О25
2365934
го воздействует сигнал модуляции усиление и гальваническая развязка импульсов управления осуществляется с помощью блока 24 вьгход- формирователей, Установивгаийгя режим работы электропривода (интервал времени О -t(, фиг.З характеризуется отсутствием перенапряжений на выходе преобразователя I частоты, при этом выходной ;сигнал (Jo датчика 9 напряжения не превьппает порог устав- j /допустимых перенапряжений на выходе преобразователя l), выходной сигнал компаратора 0 равен логи- 5 ческому сигналу I, выходной сигнал триггера II - равен I, выходной сигнал логического элемента 13 (типа И-НЕ равен О, ключевой элемент 8 - закрыт и не воздействует на второй вход задатчика 6 интенсивности.
Рассмотрим работу устройства в релсиме торможения,
Командой к началу режима торможения является уменьшение величины сигнала задания на выходе пульта 7 управления. С момента изменения указанного сигнала задания (момент времени t( , фиг.з изменяется выходной
личина тока,
сигнал и, задатчика 6 интенсивности с темпом, определяемым величиной выходного сигнала компаратора I7 и ве- личин 1ми сопротивления входных резисторов и конденсатора обратной связи интегратора 18 в задатчике 6 интенсивности. В зависимости от скорости уменьшения выходного сигнала и задатчика интенсивности (а значит , выходной частоты и напряжения электропривода) и маховых масс инер- привода изменяется скольжение асинхронного двигателя 2 в генераторном режиме работы. При этом величиной скольжения двигателя в генераторном реж11ме работы определяется вепротекающего в обратном направлении: от двигателя через диоды обратного моста автономного инвертора 16, через диод-резистор - конденсатор силового фильтра 15. Кинетическая энергия в виде электрических потерь рассеивается в самом двигателе 2, силовых элементах инвертора 16 и фильтра 15, в результате чего двигатель подтормаживается. Однако при больших скольжениях двигателя (большие темпы скиже 1ия частоты и в случае малого активного сопротивления потерь преобразователя частоты
и малой емкости конденсатора силовог фильтра (что соответствует экономичн спроектированным преобразователя 1) наблюдаются перенапряжения на выходе преобразователя частоты, приводящие выходу из строя силовых элементов . преобразователя. Указанные перенапряжения вызвага тем, что большой объем энергии при интенсивном торможении, возвращаемый от двигателя, не успевает рассеиваться в двигателе и активных элементах преобразователя частоты и приводит к накоплению энергии в емкостных и индуктивных силовых элементах преобразователя частоты, вызывая недопустимые перенапряжения,
При достижении скольжением двигателя 2 в генераторном режиме работы значения, вызьшающего протекание об- ратного тока величиной, приводящей к созданию на выходе преобразователя наибольших допустимых разрешенных перенапряжений (предельное значение которых определяется классом напря- жения выбранных силовых тиристоров инвертора 16 и предельным разрешенным значением напршкения для установленных конденсаторов силового фильтра 15), выходной сигнал U датчика 9 напряжения превьштает порог установки О -г, вследствие чего изменяется значение выходного сигнала компаратора 10 на О, Выходной сигнал логической схемы 3 равен , ключевой элемент 8 открыт и на вход интегратора 18 задатчика 6 интенсивности поступает нулевой сигнал, при этом прекращается изменение (у 5еньшение) выходного сигнала iJ задатчика 6 интенсивности, а значит, изменение выходной частоты электропривода, в результате чего ограничивается в гене- раторном режиме работы величина скол двигателя из условия предельно допустим)тх перенапряжений на выходе преобразователя 1 частоты (косвенно через ограничение скольжения двигателя достигается ограничение величины обратного тока преобразователя ). Таким образом, корректируется темп уменьшения выходного сигнала задатчика 6 интенсивности, в течение интервала проводящего состояни тиристоров инвертора 16 (т.е. при наличии импульса в выходном сигнале датчика 9 напряжения).
Состояние выходного сигнала синхронного триггера 11 задается выход
п 5
5
0
5
5
ными сигналами компаратора ГО и логического элемента И-НЕ 12 Гпоступа- юп(им на два установочных входа триггера ), а.разрешением на изменение состояния синхронного триггера 1I служит динамическое изменение на стробирующем входе сигнала с уровня 1 на уровень О. В качестве сигнала, поступающего на стробирующий вход синхронного триггера 11, используется сигнал модуляции Идс системы управления преобразователем 3, в котором перепад уровня сигналов 1 в О совпа,цает с окончанием проводящего состояния тиристоров преобразователя 1 (совпадает с момента окончания импульса в выходном сигнале датчика 9 напряжения двигателя. Если за время длительности импульса выходного напряжения (т.е. до момента начала нулевой паузы в сигнале U датчика 9 напряжения) благодаря рассеиванию энергии в элементах преобразователя 1 и двигателя 2 величина мгновенного значения сигнала Uij становится меньше предельно допустимой У , выходной сигнал компаратора 10 становится равным 1, выходной сигнал триггера 11 остается разным 1, выходной сигнал логического элемента 13 равен О, ключевой элемент 8 закрьшается, продолжается изменение (уменьшение выходного сиг- . нала задатчика б интенсивности, а значит, продолжается изменение (зг.1еньшение) выходной частоты и выходного напряжения электропривода. Режиму торможения, при котором за время проводящего состояния тиристоров (т.е. за время длительности импульса в выходном сигнале 11л датчика 9 напряхсения) перенапряжения на выходе преобразователя 1 уменьшаются нилте допустимых значени, соответствует интервал времени t - i на фиг,3.
Если за время длительности импульса выходного напряжения(т .е . если вмо- мент времени,предшествующий наступлению нулевойпаузы в сигнале датчика 9 напряжения) перенапряжения на выходе преобразователя 1 не уменьшаются. Hi-ске предельно допустимого значения (фиг.З, интервал времени 1, ) то в момент окончания импульса выходного папряжения 0 датчика 9 напряжения (контролируемый по фронту
сигнала моду71236
ляции, поступающего на стробирующий вход синхронного триггера 1l триггер 11 изменяет свое выходное состояние на О и сохраняет указанное состояние в течение времени до следую- 5 щего перепада уровня стробирующего сигнала из 1 в О, При этом выходной сигнал логического элемента И-НЕ 13 равен 1, ключевой элемент
8 открыт, выходной сигнал Uj задат- чика 6 сохраняет свое неизменное значение.
По истечении интервала времени t, -t ;} в течение которого при неизменной частоте и ограниченной (из - условия допустимых перенапряжений) величине скольжения двигателя в генераторном режиме работы избыточная кинетическая энергия привода рассеивается в элементах преобразователя 1 0 и двигателе 2, перенапряжения на выходе преобразователя 1 уменьшаются ниже предельно допустимого значения (/ и с момента времени tj начинается изменение выходной частоты с темпом, зависимым от сигнала J за- датчика 6 интенсивности, При этом выходной сигнал компаратора 10 равен 1, логического элемента 12 О, триггер 11 изменяет состояние своего 30 выходного сигнала на 1, выходной сигнал логического элемента 13 равен О, ключевой элемент 8 закрыт, от задатчика 6 интенсивности задается темп изменения уменьшения) выходной 35 частоты электропривода,двигатель 2 тормозится до заданного значениячастоты. Такшч образом, в предлагаемом устройстве осуществляется эффективное торможение двигателя при автомати- 40 ческой коррекции темпа изменения (уменьшения) частоты из условия до- до с тимых перенапряжений на силовых элементах преобразователя частоты и соответствующего этому режиму огра- 45 ничения скольжения двигателя в геНераторном режиме работы.
Предлагаемое техническое решение
сокращает вдемяторможения и повышает
надежность электропривода,уменьшает 50 стоимость и габариты устройства.
Сокращение времени торможения часотного электропривода с широтно-имульсным регулированием выходного апряжения достигается осуществле- 55 ием автоматической коррекцлм темпа меньшения частоты из условия ограниения на уровне предельно допустимых
5938
значений перенапряжений на выходе преобразователя, причем коррекция осуществляется в течение как проводящего, так и непроводящего состояни основных тиристоров преобразователя и эквивалентна режиму автоматическог выбора максимально возможного значения скольжения двигателя (из условия рассеивания кинетической энергии привода на активных элементах преобразователя в двигателе) в генераторном режиме работы, В отличие от известного устройства, в котором коррекция темпа уменьшения частоты осуществляется в функции разности сигналов задания и обратной связи по напряжению, в предлагаемом устройстве осу гаествляется эффективное торможение во всем диапазоне выходных частот электропривода (т.е. независимо от величи Ы скважности импульсов регулируемого выходного напряжения.
Формула изобретения
Устройство для управления торможением частотно-регулируемого электропривода, содержащее преобразователь частоты с широтно-импульсным регулированием выходного напряжения, подсоединенный выходом к асинхронному двигателю, а входом через систему управления преобразователем с модулирующим выходом - к входам блоков управления напряжением и частотой, за- датчик интенсивности, один из входов которого снабжен выводом для подключения к вьгходу пульта управления, другим входом подключенный к выходу ключевого .элемента, а выходом - к входам блоков управления напряжением и частотой, датчик напряжения двигателя, подключенный-выходом к входу компаратора, отличающееся тем, что, с целью сокращения времени торможения, в него введены синхронный триггер, первый и второй логические элементы типа И-НЕ,, синхронный триггер подключен первым входом непосредственно, а,вторым входом через первый логический элемент И-НЕ - к выходу компаратора, третьим стробирующим вхо дом синхронный триггер подсоединен к модулирующему выходу системы управления преобразователем, а своим выходом - к первому входу второго логического элемента И-НЕ, связанного вторым входом с выходом компаратора, а выходом - с входом ключевого элемента.
%4
. %/
fe ff
%l
Редактор E, Папп
Составитель В. ):арасов
Техред Л.Олейннк Корректор М, Шарогаи
Заказ 3096/57Тираж 631 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035,, Москва, Ж-35, Раушская наб,, д,А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиг. 2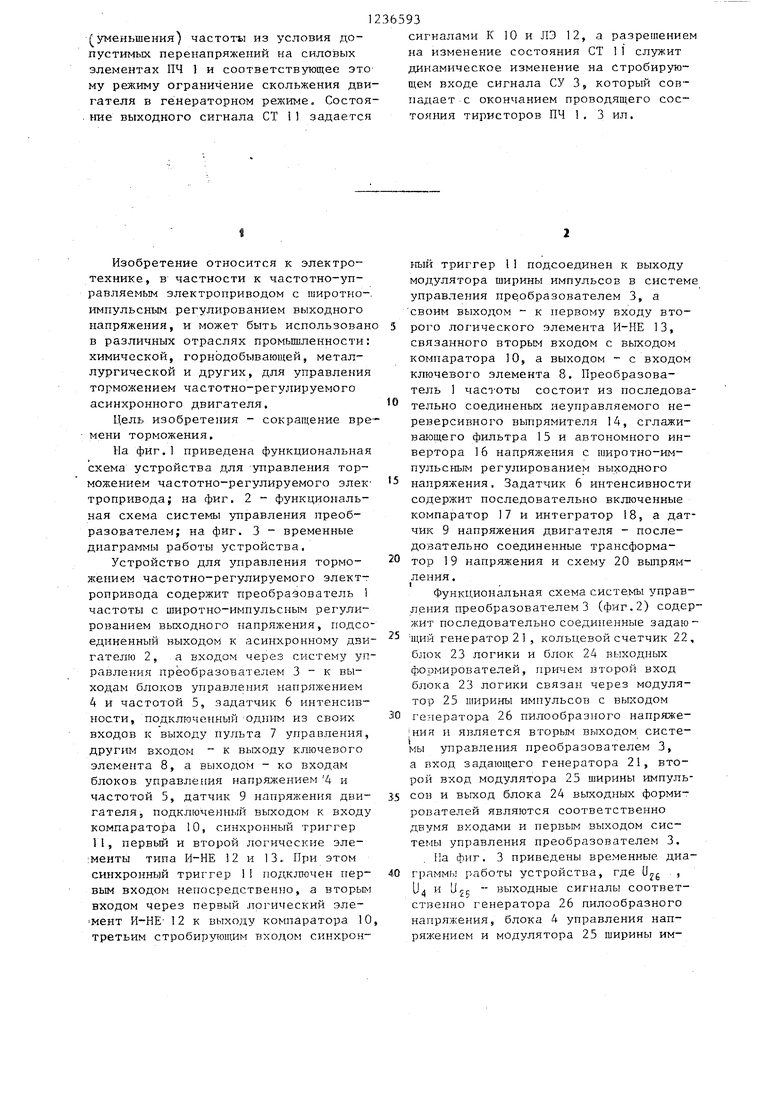
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения | 1988 |
|
SU1552322A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| Асинхронный электропривод | 1985 |
|
SU1280686A1 |
| Устройство для реверса асинхронного частотно-регулируемого электродвигателя | 1983 |
|
SU1418881A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Способ торможения электрической машины | 1990 |
|
SU1830177A3 |
Устройство для управления торможением частотно-регулируемого электропривода может быть использовано для асинхронного двигателя. Цель изобретения - сокращение времени торможения. Устройство содержит преобразователь частоты (ПЧ) I с широтно- импульсным регулированием, асинхронный двигатель 2, систему управления (СУ) 3, блоки управления напряжением 4 и частотой 5. Задатчик 6 интенсивности подключен одним входом к пульту 7 управления, а другим входом - к ключевому элементу 8-. Датчик 9 напряжения двигателя подключен к входу компаратора 10. Введение синхронного триггера (СТ) Ii первого и второго логических элементов (ЛЭ) (типа И-НЕ) 12 и 13 осуществляет эффективное торможение двигателя при автоматической коррекции темпа изменения (Л pi/g.f
| Устройство для задания темпа изменения частоты и напряжения частотного электропривода | 1972 |
|
SU486445A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
