Изобретение относится к электротехнике, в частности к технике частотного управления асинхронными двигателями, и может быть использовано в злекгроприводах механизмов, требующих ограничения тока двигателя в переходных режимах и форми рования экскаваторной механической характеристики,
Цель изобретения - улушиение энергетических показателей электропривода в переходных режимах ограничения тока статора и замедления темпа разгона при больших моментах нагрузк ;.
На фмг. 1 представлена функциональная схема асинхронного электропривода; на фиг. 2 - схема задатчика интенсивности. , Асинхронный Электра при вод содерж,ит трехфазный асинхрониы1 двигатель 1 (фиг. 1), подключенный к непосредственному преобразователю 2 частоты, силовая часть которого состоит из девяти пар встречно-параллельно включенных тиристоров, управляющие электроды которых подключены к выходу системы 3 управления преобразователем. Выход задатчика 4 частоты соединен с первым входом введенного управл.чемого коммутатора 5, второй вход которого подключен к выходу задатчика 6 частоты Б режиме упора, Е5ъ1у.од управляемого коммутатора 5 соединен с первым входом задатчика 7 интенсмвнести, выход которого гюдключен к пе;рвому входу системы 3 управления преобразователем частоты и к входу функционального преобразователя 8. Выход функционального преобразователя 8 подключен к первому входу эле -1ента 9 сравнения, второй вход которого соединен с аыходом вычислителя 10 модуля вектора ЭДС. Входы вычислителя 10 подключены к трехфазному дгтчику 11 тока и трехфазному датчику 12 напряжения, coie- динекным с входными заж /мами статорной обмотки асинхронного двигателя 1. Выход первого элемента 9 сравнения через блок регулятора 13 выходного напряжения пре- обраэовс теля соединен с 1зторым входом системы 3 управления прзобразователя частоты. Выходы трехфазного датчика 11 тока через введенные последозательно сое- д:лненные выпрямитель 14 и фильтр 15 низкой частоты подключены к первым входам элементов 16 м 17 сравнеж яя. Второй вход элементе 16 сравнения подключен к выходу введенного задатчика устаики тока упора, а второй вход элемента 17 сравнения подключен к выходу введенного задатчика 19 уставки дмнамичаскоготокоограничения, Выход элемента 16 сравнения соединен с входами зведеиных нуль-органа 20 и ключевого элемента 21, а выход элемента 17
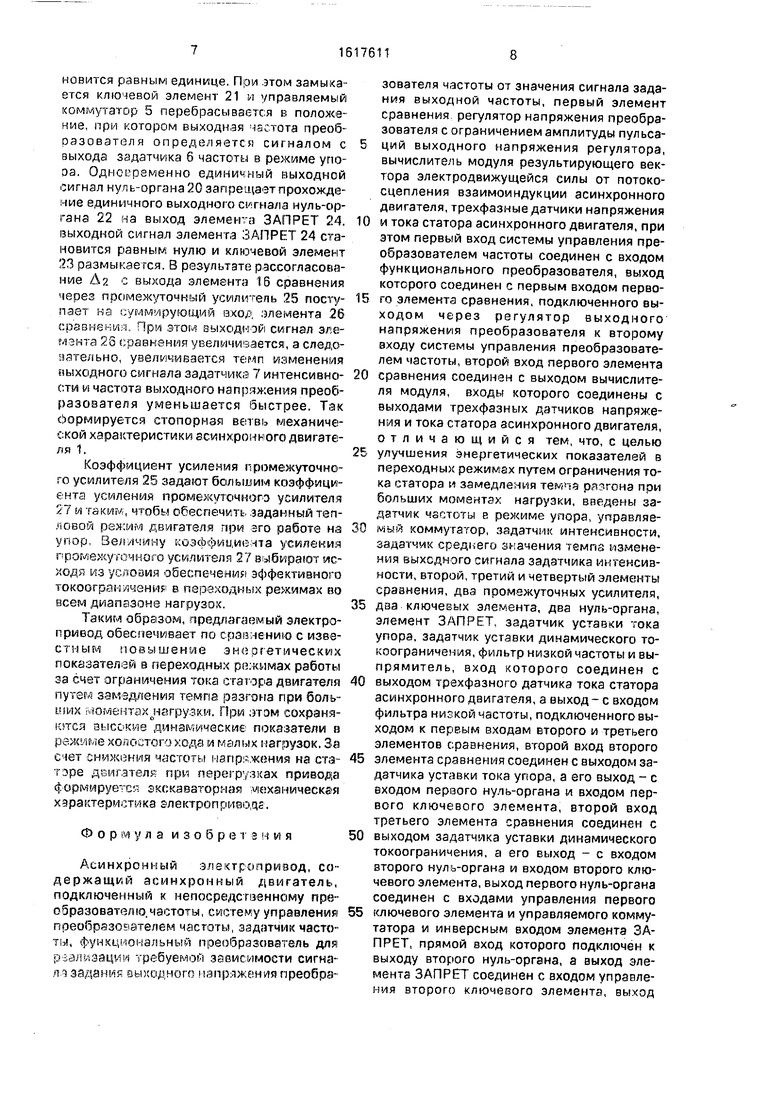
сравнени.ч - с входами введенных нуль-органа 22 и ключевого элемента 23, Выход нуль-органа 20 соединен с входами управления управляемого коммутатора 5 и ключево- 5 го элемента 21 и с инверсным входом введенного логического элемента ЗАПРЕТ 24. Прямой вход элемента ЗАПРЕТ 24 подключен к выходу нуль-органа 22, а выход - к выходу управления ключевого элемента 23. 0 Выход ключевого элемента 21 через введенный промежуточный усилитель 25 подключен к первому суммирующему входу введенного элемента 26 сравнения, а выход ключевого элемента 23 через второй вве- 5 денный промежуточный усилитель 27 - к вычитающему входу элемента 26 сравнения, второй суммирующий вход которого соединен с выходом введенного задатчика 28 среднего значения темпа изменения выход0 ного сигнала задатчика интенсивности. Выход элемента 26 сравнения подключен к второму входу задатчика 7 интенсивности. Задатчик 7 интенсивности частоты вращения двигателя выполнен на последова5 тельно соединенных компараторе 29, усилителе 30 с регулируемым коэффициентом усиления и интеграторе 31. При этом выход интегратора 31 образует выход задатчика 7 интенсивности и соединен с первым
0 входом компаратора 29, второй вход которого является первым входом задатчика 7, Вход управления усилителя 30 с регулируемым коэффициентом усиления образует второй вход задатчика 7 интенсивности.
5 Асинхронный электропривод работает следующим образом.
По выходному сигналу задатчика 7 интенсивности и выходному сигналу блока регулятора 13 система 3 управления
0 формирует импульсы управления тиристорами преобразователя 2 таким образом, что частота и амплитуда основной гармоники выходного напряжения пропорциональны соответствующим входным сигналам систе5 мы 3 управления преобразователем.
Система управления электроприводом обеспечивает формирование механических характеристик при стабилизации потоко- сцепления взаимоиндукции асинхронного
0 двигателя 1, формирование экскаваторной механической характеристики и ограничение тока двигателя на заданном уровне в переходных режимах работы электропривода. Функциональный преобразователь 8
5 формирует сигнал задания Уз модуля ЭДС в линейной зависимости от входного аналогового сигнала Uf задатчика 7 интенсивности. Сигнал задания Us модуля ЭДС взаимоиндукции с выхода функционального преоб- оазователя 8 поступает на первый вход
элемента 9 сравнения, на второй вход которого поступает сигнал обратной связи по модулю ЭДС взаимоиндукции с выхода вычислителя 10. Сигнал, пропорциональный модулю ЭДС, определяется по мгновенным значениям фазных ЭДС двигателя. Сигналы фазных ЭДС формируются на основании информации о мгновенных значениях тока в обмотках статора асинхронного двигателя 1 и напряжениях на зажимах статора двигателя, снимаемой соответственно с трехфазного датчика 11 тока и с трехфазного датчика 12 напряжения. Разность между сигналом задания Ua модуля ЭДС взаимоиндукции и сигналом обратной связи по модулю ЭДС снимается с выхода элемента 9 сравнения и подается на вход блока регулятора 13 выходного напряжения преобразователя. Блок регулятора 13, выполненный с последовательно соединенными ПИ-регулятором и ограничителем пульсаций выходного напряжения регулятора, обеспечивает стабилизацию потокосцепления взаимоиндукции асинхронного двигателя 1 во всем диапазоне регулирования скорости.
На первый вход задатчика 7 интенсивности подается сигнал задания частоты преобразователя либо с выхода задатчика 4 частоты, либо с выхода задатчика 6 частоты в режиме упора в зависимости от положения, в котором находится управляемый ком- мутатор 5. Положение, в котором находится управляемый коммутатор 5, определяется сигналом (единичный или нулевой) на его выходе управления. Второй вход задатчика интенсивности служит для воздействия на темп изменения егб выходного сигнала, и чем больше по абсолютному значению величина сигнала на указанном втором входе, тем выше темп изменения выходного сигнала задатчика 7.
Выходные сигналы трехфазного датчика 11 тока выпрямляются выпрямителем 14, фильтруются фильтром 15 низкой частоты и поступают на первые входы элементов 16 и 17 сравнения. На второй вход элемента 17 сравнения поступает с отрицательным знаком сигнал уставки lorp. динамического то- коограничения с выхода задатчика 19, а на второй вход элемента 16 сравнения - также с отрицательным знаком сигнал уставки тока упора 1уп. с выхода задатчика 18. Величины сигналов lorp. и 1уп. выбирают исходя из необходимого уровня ограничения тока двигателя в переходных режимах и уровня тока двигателя, при котором формируется стопорная часть его механической характеристики. При этом сигнал уставки lorp. меньше сигнала уставки 1уп. Рассогласование AI
0
L-lorp с выхода элемента 17 сравнения подается на входы нуль-органа и ключевого элемента 23, а рассогласование c 1 - iyn с выхода элемента 16 сравнения - на
входы нуль-органа 20 и ключевого элемента 21. Когда рассогласование (Ai или А2 ) на входе нуль-органа 20 или 22 меньше нуля, сигналы на выходах этих нуль-органов равны логическому нулю и ключевые элементы
0 21 и 23 разомкнуты. При разгоне (торможении) электропривода в случае, когда сигнал 1 на выходе фильтра 15 низкой частоты меньше сигнала уставки lorp. (а значит, и сигнала уставки 1уп), рассогласования Ai и Л2 на выходах соответствующих элементов сравнения меньше нуля, выходные сигналы нуль-органов 20 и 22 равны нулю и ключевые элементы 21 и 23 разомкнуты. Управляемый коммутатор 5 находится при этом в положении, изображенном на фиг, 1, т. е. частота вращения двигателя задается сигналом с выхода задатчика 4 частоты. Темп изменения выходного сигнала задатчика 7 интенсивности определяется при этом величиной сигнала с выхода задатчика 28 среднего значения темпа. Если сигнал I становится равным lorp. Ij 1уп, то выходной сигнал нуль-органа 22 становится равным единице,
0 а нуль-органа 20 остается равным нулю. При этом сигнал на выходе элемента ЗАПРЕТ 24 становится равным логической единице, замыкается ключевой элемент 23 и рассогласование AI с выхода элемента 17 сравне5 ния через промежуточный усилитель 27 поступает на вычитающий вход элемента 26 сравнения. Выходной сигнал элемента 26 сравнения при этом уменьшается, следовательно, снижается темп изменения выход0 ного сигнала задатчика 7 интенсивности. Уровень этого уменьшения определяется величиной рассогласования Ai. Приуменьшении темпа изменения выходного сигнала задатчика 7 интенсивности уменьшается
5 ток асинхронного двигателя 1, и когда сигнал 1о становится меньше сигнала уставки lorp.. выходной сигнал нуль-органа 22 становится равным нулю, размыкается ключевой элемент 23 и темп изменения выходного
0 сигнала 7 задатчика определяется только сигналом с выхода задатчика 28 среднего значения темпа.
В случае, если сигнал «, на выходе 5 фильтра 15 низкой частоты становится большим сигнала уставки iyn. на выходе задатчика 18, рассогласование А2 на выходе элемента 16 сравнения становится больше нуля и выходной сигнал нуль-органа 20 становится равным единице. При .этом замыкается ключевой элемент 21 и управляемый комг«4утатор 5 перебрасывается в полох е- ние, при котором выходная чйстота преобразователя определяется сигналом с выхода зздатчика 6 частоты в режиме упо- оа, Одновременно единичный выходной сигнал нуль-органа 20 запрещает прохождение единичного выходного сигнала нуль-органа 22 на выход элемента ЗАПРЕТ 24. выходной сигнал элемента ЗАПРЕЕТ 24 становится равным нулю и клнэчевой элемент размыкается. В результате рассогласование А, с выхода элемента 16 сравнения через промеж,ггочнг 1й усилитель 25 nocir пает НгЭ сурлм /чрующий аход элемента 26 сравнения. При этом выходной сигнал эле- энта 26 сравнения увелмчмэается, а следовательно, увеличивается темп изменения выходного сигнала задатчика 7 интенсивно- сти W частота выходного напряжения преобразователя уменьшается быстрее. Так Нормируется стопорная ветвь механиче - с:кой характеристики асинхронного двигателя 1.
Коэффициент усиления промежуточно - го усилителя 25 задают большим коэффициента усиления промех д-очного усилителя 27 м , чтобы обеспечить .заданный тепловой режим двигателя при эго работе на упор, Е е/глчину коэффициента усиления промежуточного усилителя 27 выбирают sic- )(одя ti3 условия обеспечения эффективного токоограну ченм в переходных режимах ЕЮ всем диапазоне нагрузок.
Таким образом, гфедлагаемый электропривод обеспечивает по сравне нию с известным повышение энергетических показателей в переходных режимах работы за счет ограничения тока ciaropia двигателя путем замедления темпа paзro ra при боль- usMx -viOiVieHTaxjsarpysKH. При этом сохраня- К.ПСЯ высокие динамические: показатели н реяс1-1ме холостого хода и малых нагрузок. 3« счет снижоимя частоть напр1;;.жйния на ста- тэре двигателя при перегрузках привода Ф ормируется экскаваторная механмческая характеристика электропривода.
Формула и 3 о б р е ( э и м я
50
Асинхронный электропривод, содержащий асинхронный двигатель, подключенный к непосредственн(зму преобразователю, частоты, систему управления
преобразователем частоты, задптчмк частоты, функциональный преобразователь для рзаямзации требуемой зависимости сигна- л.э задания вьп одного мапряжеиния преобразователя частоты от значения сигнала задания выходной частоты, первый элемент сравнения, регулятор напряжения преобразователя с ограничением амплитуды пульсаций выходного напряжения регулятора, вычислитель модуля результирующего вектора злектродвижущейся силы от потоко- сцепления взаимоиндукции асинхронного двигателя, трехфазныеу атчики напряжения и тока статора асинхронного двигателя, при этом первый вход системы управления преобразователем частоты соединен с входом функционального преобразователя, выход которого соединен с первым входом первого элемента сравнения, подключенного выходом через регулятор выходного напряжения преобразователя к второму входу системы управления преобразователем частоты, второй вход первого элемента сравнения соединен с выходом вычислителя модуля, входы которого соединены с выходами трехфазных датчиков напряжения и тока статора асинхронного двигателя, отличающийся тем, что, с целью улучшения энергетических показателей в переходных режимах путем ограничения тока статора и замедления темпа разгона при больших моментах нагрузки, введены за- датчик частоты е режиме упора, управляемый коммутатор, задатчмк интенсивности, задатчик среднего значения темпа мзмене- имя выходного сигнала задатчика иитенсиз- ности, второй, третий и четвертый элем€ нты сравнения, два промежуточных усилителя, два ключевых элемента, два нуль-органа, элемент ЗАПРЕТ, задатчик уставки тока упора, задатчик уставки динамического то- коограничения, фильтр низкой частоты и выпрямитель, вход которого соединен с выходом трехфазного датчика тока статора асинхронного двигателя, а выход-с входом фильтра низкой частоты, подключенного выходом к первым входам второго и третьего элементов сравнения, второй вход второго элемента сравнения соединен с выходом задатчика уставки тока упора, а его выход - с входом первого нуль-органа и входом первого ключевого элемента, второй вход третьего элемента сравнения соединен с выходом задатчика уставки динамического токоограничения, а его выход - с входом второго нуль-органа и входом второго ключевого элемента, выход первого нуль-органа соединен с входами управления первого лючевого элемента и управляемого коммутатора и инверсным входом элемента ЗАПРЕТ, прямой вход которого подключен к выходу второго нуль-органа, а выход элемента ЗАПРЕТ соединен с входом управления второго ключевого элемента, выход
первого ключевого элемента через первый промежуточный усилитель подключен к первому суммирующему входу четвертого элемента сравнения, выход второго ключевого элемента через второй промежуточный усилитель подключен к вычитающему входу четвертого элемента сравнения, второй суммирующий вход которого соединен с выходом задатчика среднего значения темпа изменения выходного сигнала задатчика интенсивности, задатчик частоты выходом
соединен с первым входом управляемого коммутатора, второй вход которого подключен к выходу задатчика частоты в режиме упора, выход управляемого
коммутатора соединен с первым входом задатчика интенсивности, второй вход которого подключен к выходу четвертого элемента сравнения, а выход задатчика интенсивности соединен с входом указанного функционального преобразователя.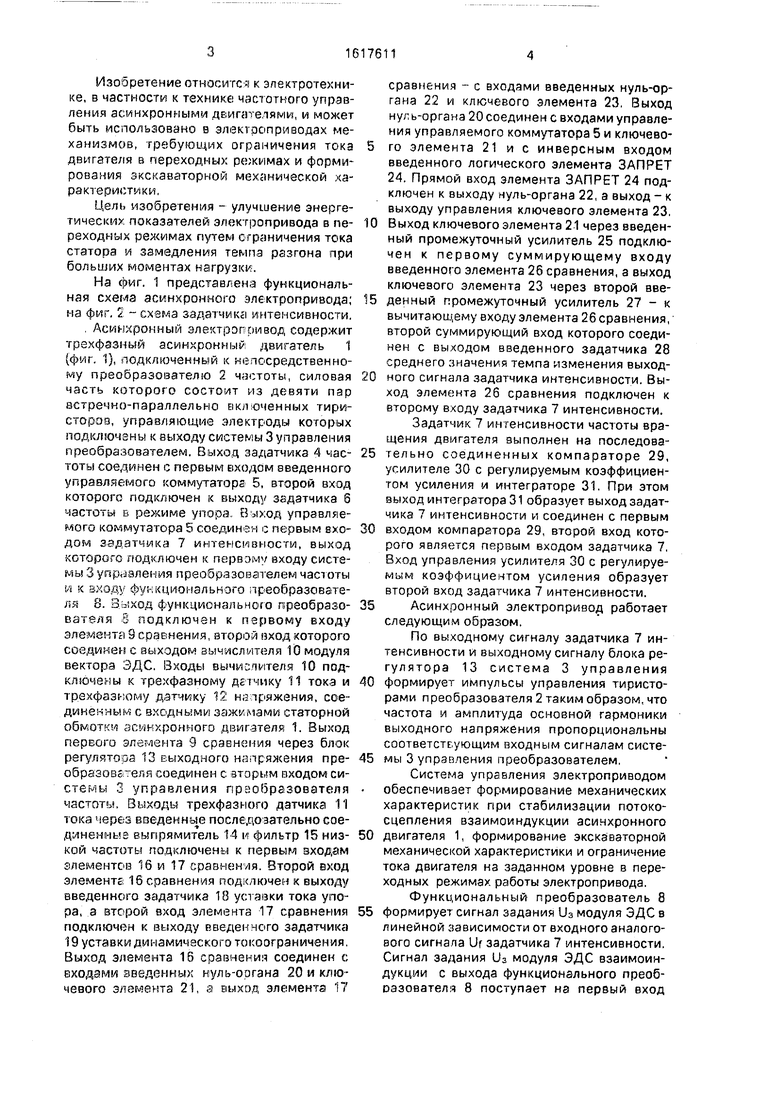

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Электропривод | 1987 |
|
SU1432713A1 |
| Устройство для управления электроприводом переменного тока | 1987 |
|
SU1432712A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Электропривод переменного тока | 1988 |
|
SU1548837A1 |
| Асинхронный частотно-регулируемый электропривод | 1983 |
|
SU1153386A1 |

Изобретение относится к электротехнике, а именно к области частотного управления асинхронными двигателями, и может быть использовано в электроприводах механизмов, требующих ограничения тока двигателя в переходных режимах и формирования экскаваторной механической характеристики. Целью изобретения является улучшение энергетических показателей электропривода в переходных режимах путем ограничения тока статора и замедления темпа разгона при больших моментах нагрузки. Указанная цель достигается тем, что в электропривод, содержащий асинхронный двигатель 1, подключенный к непосредственному преобразователю 2 частоты, введены задатчик 6 частоты в режиме упора, управляемый коммутатор 5, задатчик 7 интенсивности, задатчик 28 среднего значения темпа изменения сигнала, элементы 16, 17, 26 сравнения, промежуточные усилители 25, 27, ключевые элементы 21, 23, нуль-органы 20, 22, элемент "Запрет" 24, задатчик 18 уставки тока в режиме упора, задатчик 19 уставки динамического токоограничения, фильтр 15 низкой частоты и выпрямитель 14. При этом обеспечивается эффективное токоограничение в переходных режимах во всем диапазоне нагрузок. 2 ил.
№г
| Должников С.Ю., Подобедов Е.Г., Семченко А.А | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| - В кн.: Состояние и перспективы развития электротехиоло гни | |||
| Тезисы докладов Всесоюзной НТК, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Иваново, 1985, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
| Электропривод | 1987 |
|
SU1432713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ) АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | |||
