Изобретение относится к измерительной технике, может быть использовано для индикации квадратурности двух гармонических сигналов.
Цель изобретения - повышение точности измерения путем расширения числа контролируемых параметров измеряемого сигнала.
Сущность способа заключается в следующем.
Пусть измеряемое напряжение имеет амплитуду йцд , а.опорное - UQ, угол между векторами Uy иП, равен /Z. Обозначим заданное отношение амплитуд Uijo /UQ К, тогда увеличен амплитуды вектора Uj, в К раз приводи к тому, что она будет равна Uy , т.е. заданной амплитуде.измеряемого напряжения. При повороте вектора Ug на угол и суммирования его с вектором U(j , результирующий вектор и.- равен нулю. Пусть теперь амплитуды измеряемого напряжения соответствуют заданной величине бц, а фаза отклоняется от угла IT/2 на величину ± об . Поскольку после поворота вектора на угол -Т/2 выражение для век
тора и будет
ии sin
,tl ч
(cot - -5)
то сумма векторов U и U,, соответствует выражению
((U))+K (cot - Г - ) sin(cot +1 toi) +nin(wt -|) (ut±|) sin I ,
sin
(cot t).
что справедливо для мальтх углов отклонения .
Модуль этого вектора oi U линейно зависит от величины отклонения от ортогональности об .
Пусть теперь измеряемое напряжение йц ортогонально по отношению к напряжению U, но отличается от него по амплитуде.
В этом случае результирующий вектор и,- равен
2 sin(w t + |) +
/J+ к UQ sin( ut - -) Uy Ш t UUc ,,
- -- и
cos U t (Цц - ) cos со t
+
uU . cos (л) t,
т.е. модуль этого вектора линейно зависит от величины отклонения измеряемого вектора от его заданного значения ,
При одновременном отклонении от ортогональности и заданного отношения амплитуд суммарный вектор будет
и и.
sin (со t К 11 sinCcOt - |).
+ )
+
Амплитуда этого вектора может быть вычислена в соответствии с выражением
+
U,
1
и +(КиУ -2U,, и„К cosod
U о и о
или определена графически.
На фиг.1 приведен пример графичес- кого определения амплитуды результирующего вектора для случая, когда на фиг.2 - структурная схема устройства, реализующего предлагаемый способ.
Ha фиг.I приняты следующие обозначения: U - вектор опорного напряжения; Ug - вектор опорного н-:шряжения,
/ ч ,т
повернутый на угол - -«-: U(, - вектор измеряемого напряжения, амплитуда которого меньше заданной; - суммарный вектор для случая U , Uy и вектор измеряемого напряжения при равенстве амплитуд и отклонений от, ортогональности на угол ± об; и Uj- - результирующие векторы для этих случаев; U и U, - векторы измеряемых напряжений, отличающиеся как по амплитуде, так и по углу (от
и.
Uc
результирующие
21 г, 5
вектора для этих случаев.
Таким образом, измеряя модуль вектора результирующего напряжения, можно судить о допустимом отклонении измеряемых напряжений от квадратурности по параметрам заданного отклонения амплитуд и ортогональности.
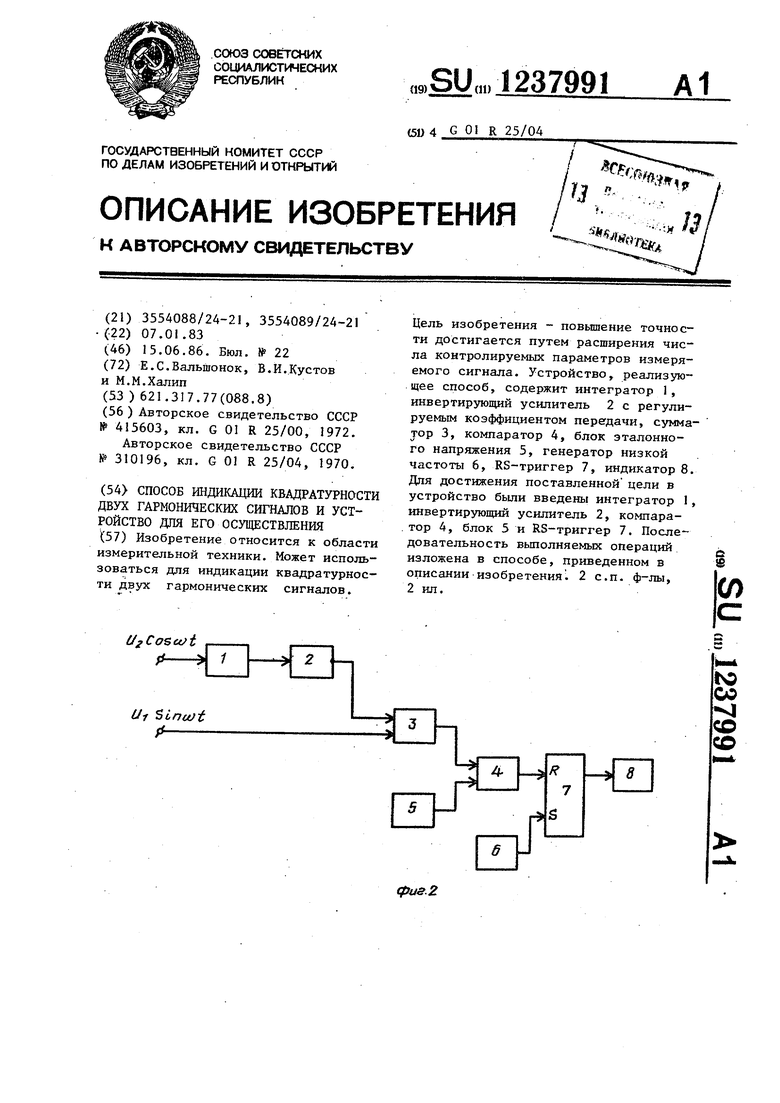
Устройство, реализующее предлагае- мый способ, содержит интегратор 1, инвертирующий усилитель 2 с регулируемым коэффициентом передачи, сумматор 3, компаратор 4, блок 5 эталонно го напряжения, генератор 6 низкой ча частоты, RS-триггер 7 с динамическим входами, индикатор 8. При этом первы вход сумматора 3 соединен с первой входной клеммой, вход интегратора 1 соединен с второй входной клеммой, а выход через инвертирующий усилитель 2 с регулируемым коэффициентом передачи соединен с вторым входом сумматора 3, выход которого соединен с первым входом компаратора 4, к второму входу которого подсоединен выход блока 5 эталонного напряжения, выход компаратора 4 соединен с рер- вым входом RS-триггера 7 с динамичес кими входами, второй вход которого соединен с генератором 6 низкой частоты, выход RS-триггера 7 соединен, с индикатором 8.
Устройство работает следующим образом.
Контролируемые квадратурные напряжения UjSinQt и U cosQt через первую и вторую клеммы постзшают на входы сумматора 3, но при этом напряже- ние Ujcoscjt предварительно интегрируется с помощью интегратора 1 и инвертируется усилителем 2 с регулируемым коэффициентом передачи в соответствии с выражением
и, -К J и coscot -К и sinu)t
интер
где К - коэффициент передачи усилителя 2.
При равенстве исходных напряжений 1 коэффициент передачи интегратором 1 с усилителем 2 устанавливают равным -1. Допустим, что входные напряжения U,uincot и Ug cos cot строго ортогональны , но не равны по амплитуде. Тогда на выходе сумматора 3 выходной сигнал Ug- может быть определен из выражения
и U,sincot -UgSinCOt
(и, - и,) sincotj
(1)
откуда видно, что суммарное напряжение Ug линейно зависит от разности амплитуд исходных напряжений.
Если же входные напряжения равны поамплитуде, но не взаимны, перпендикулярны (т.е. сдвиг фаз не соответствует 90 ), то напряжение на выходе сумматора будет иметь вид
и и Psincot+sin (at + « +«; )J
Т
2U sin
(u)t
- ) 2-2
cos
- 2
2U cos
-2U cos (Qt +
где oi - отклонение от ортогональности квадратурных напряжений. Для малых углов отклонения от ортогональности
sin
oi 2
,
тогда
вых,
-oi и cos (cot +
-г),
(2)
5 Ю 5
20
25 0
5
откуда видно, что выходное напряже - ние Ugbiy - линейно зависит от величины отклонения от ортогональности квадратурных напряжений. При одновременном отклонении квадратурных -напряжений от ортогональности и неравенства амплитуд.на выходе сумматора 3 появляется синусоидальное напряжение, соответствующее векторной сумме напряжений, определяемых выражениями (1) и (2). Напряжение с выхода сумматора 3 поступает на первый вход компаратора 4, на второй вход которого подается пороговое напряжение от блока 5 эталонного напряжения, причем величина этого напряжения определяет допустимьй уровень возникающих отклонений квадратурных напряжений как по амплитуде, так и по фазе.
Если отклонение от квадратурности преньшает установленный пороговый уровень на компараторе 4, то на его выходе появляются импульсы, которые
поступают на первый вход RS-триггге- ра 7 с динамическими входами, а на второй вход этого триггера 7 поступают импульсы от генератора 6 низкой частоты. В Этом случае RS-триггер 7
переключается в состояние, соответствующее срабатывание индикатора 8, которьш и фиксирует отклонение параметров квадратурного напряжения от заданных пределов. В связи с существенно более низкой частотой
сигнала на втором входе RS-триггера 7 переключение в состояние, соответствующее заданным пределам (по фазе и амплитуде) квадратурных напряжений,
происходит на время, не превышающее периода входных импульсов, которые имеют такую малую длительность, что индикатор 8 не реагирует на них. Еели же сигнал с выхода сумматора 3 не превьшает порогового уровня на втором входе компаратора, то на его выходе постоянно будет постоянный уровень, а на такой сигнал RS-триг- гер 7 не реагирует, и соответственно индикатор 8 не сигнализирует об отключении квадратурных напряжений от заданных пределов, поскольку на второй вход RS-триггера 7 постоянно поступают.импульсы низкой частоты, устанавливающие его в состояние, соответствующее удовлетворительному качеству источника квадратурных напряжений.
Формула изобретения
1. Способ индикации квадратур- ности двух гармонических сигналов, заключаиицийся в том, что получают проекции измеряемого напряжения и Измеряют разности величин этих проекций относительно вектора опорного напряжения,отличающийся тем, что, с целью повышения точности измерения путем расширения числа контролируемых параметров измеряемого сигнала, поворачивают вектор
If опорного напряжения на угол -
изменяют его амплитуду в К раз, рав- ное заданному отношению амплитуд измеряемого и опорного, напряжений, сум
мируют его с вектором измеряемого напряжения и измеряют модуль результирующего вектора суммы этих векторов.
2, Устройство для индикации квад- ратурности двух гармонических сигналов, содержащее сумматор, вход которого соединен с первой входной клеммой генератор низкой частоты, индикатор, отличающееся тем, что, с целью повьщ1ения точности измерения путем расщирения числа контролируемых параметров измеряемого сигнала, в-него введены интегратор, инвертирующий усилитель с регулируемым коэффициентом передачи, компаратор, блок эталонного напряжения, RS-триггер с динамическими входами, при этом вход интегратора соединен с второй входной клеммой, а выход через инвертирующий усилитель с регулируемым коэффициентом передачи соединен с вторым входом сумматора, выход которого соединен с первым входом компаратора, к второму входу которого подсоединен выход блока эталонного напряжения,выход компаратора соединен с первым входом R5-триггера с д.инамическими входами, второй вход которого соединен с генератором низкой частоты, выход 1 5-тригг ра с динамическими входами соединен с индикатором.
ВНИИПИ Заказ 3284/45
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 728 Подписное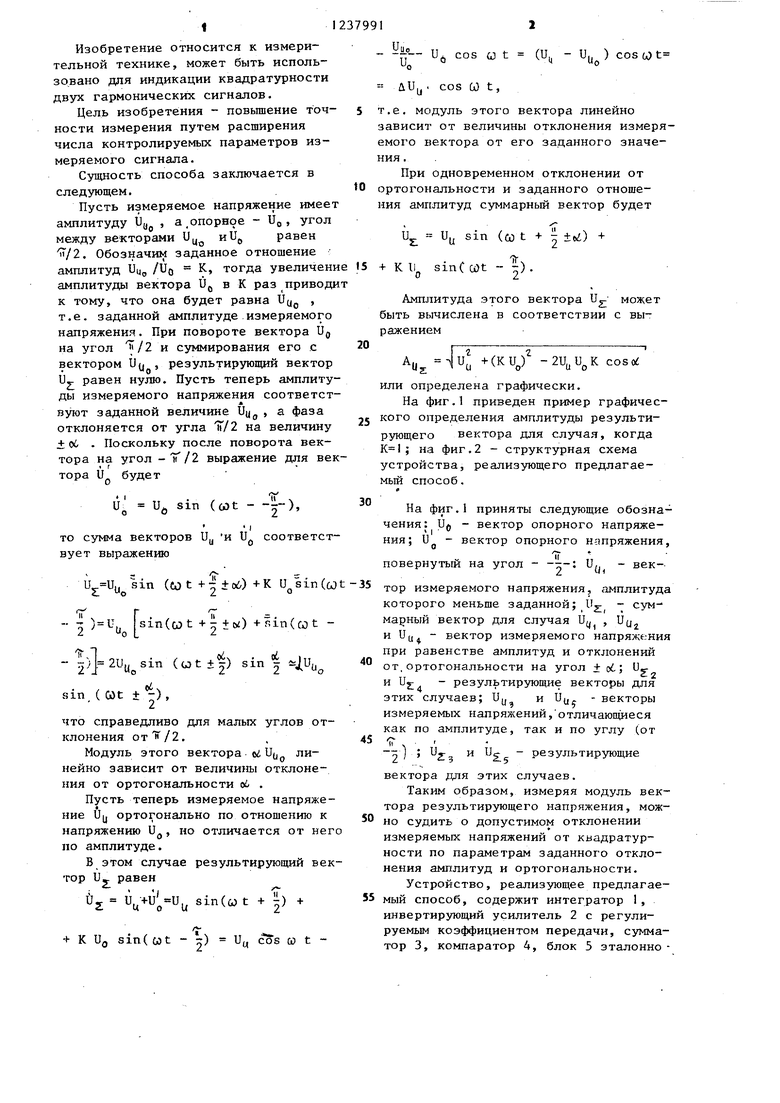
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ индикации квадратурного сдвига фаз | 1984 |
|
SU1241146A1 |
| Способ формирования многофазной системы квазисинусоидальных напряжений | 1985 |
|
SU1356141A1 |
| Амплитудно-фазовый анализатор гармоник периодических напряжений | 1985 |
|
SU1303950A2 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Генераторное устройство для геоэлектроразведки | 1984 |
|
SU1233075A1 |
| Стохастический стробоскопический измеритель разности фаз | 1986 |
|
SU1413549A1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| Устройство для индикации квадратурного сдвига фаз между двумя гармоническими сигналами | 1986 |
|
SU1337813A1 |
| Способ определения мгновенных значений фазового сдвига электрических сигналов | 1987 |
|
SU1499265A1 |
| Устройство для защиты от замыканий на землю | 1987 |
|
SU1492409A1 |
Изобретение относится к области измерительной техники. Может использоваться для индикации квадратурнос- ти двух гармонических сигналов. Цель изобретения - повышение точности достигается путем расширения числа контролируемых параметров измеряемого сигнала. Устройство, реализующее способ, содержит интегратор 1, инвертирующий усилитель 2 с регулируемым коэффициентом передачи, сумма- jop 3, компаратор 4, блок эталонного напряжения 5, генератор низкой частоты 6, RS-триггер 7, индикатор 8. Для достижения поставленной цели в устройство были введены интегратор 1, инвертирующий усилитель 2, компара- . тор 4, блок 5 и RS-триггер 7. Последовательность выполняемых операций изложена в способе, приведенном в описании изобретения. 2 с.п. ф-лы, 2 ил. (О to со Ni со ;0 (pus.Z