сл С


| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1989 |
|
RU1711635C |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |


Использование: в электропроводах со стабилизацией частоты вращения. Сущность- двумя парами запоминающих элементов 11, 13 и 12, 14, подключенными соответственно к синусной и косинусной выходным обмоткам 9 и 10 датчика 6 положения ротора, выделяются сигналы, пропорциональные сумме тригонометрических функций угла поворота и частоты вращения и их разности, Составляющие этих сигналов разделяются сумматорами 17, 21 и 12, 14 и инверторами 20 и 21. Сигналы, пропорциональные синусу и косинусу угла поворота ротора, модулируются соответственно ши- ротно-импульсными преобразователями 24
-ч о
X С СО 00
и 25, выходы каждого из которых соединены с управляющими входами для переключателей 26, 27 и 28, 29. На сигнальные входы первого 28 (29) из каждой пары переключателей подаются сигналы, пропорциональные синусу л косинусу частоты вращения. После суммирования и усреднения выходных сигналов этих переключателей формируется сигнал постоянного тока, пропорциональный част оте вращения ротора, который для введения обратной связи подается на второй вход блока 31 сравнеИзобретение относится к электротехнике, а именно к двигателям постоянного тока с бесконтактной коммутацией, и может быть использовано в электроприводах со стабилизированной частотой вращения.
Известен вентильный электродвигатель, содержащий синхронную машину с обмоткой якоря на статоре, датчик положения и полупроводниковый коммутатор, в котором стабилизация частоты вращения достигается введением отрицательной обратной связи по скорости от синхронного тахогене- ратора.
Недостатком этого электродвигателя является его сложность и низкая надежность, вызванная наличием дополнительной электрической машины - синхронного тахогенератора.
Известен также вентильный электродвигатель, содержащий синхронную машину с обмоткой якоря на статоре, полупроводниковый коммутатор и датчик положения в виде фазовращателя, с помощью которого определяется угловое положение и сокрость вращения ротора путем .цифровой обработки выходного сигнала фазовращателя (как предложено в а.с. М: 934382, кл. G 01 Р 3/489, опубл. 07.06.82).
Недостатком этого устройства является его сложность, вызванная цифровой обработкой сигналов фазовращателя, Кроме того, информация о скорости вращения выдается в виде цифрового кода, что также усложняет схему управления в случае, если система стабилизации частоты вращения выполнена аналоговой.
Из известных устройств наиболее близ - ким по назначению и технической сущности к предлагаемому является вентильный электродвигатель, в котором датчик положения снабжен дополнительной обмоткой подмаг- ничивания, что приводит к появлению в сигналах синусной и косинусной выходных обмоток датчика положения низкочастотния, первый вход которого подключен к за- датчику 30 частоты вращения. Выход блока сравнения соединен с регулятором 32 скорости, выходной сигнал которого поступает на сигнальные входы второго 26 (27) из каждой пары переключателей, с помощью которых умножается на синус и косинус угла поворота. После усреднения выходные сигналы переключателей подаются на усилители 4 и 5 мощности, соединенные с синусной и косинусной фазами 2 и 3 обмотки синхронной машины 1. 8 ил.
ной составляющей, пропорциональной частоте вращения, которая выделяется запоминающими элементами и используется как сигнал тахометрической обратной связи.
Это устройство имеет максимальное количество сходных существенных признаков с заявляемым, вследствие чего оно принято за прототип.
Недостатком этого вентильного электродвигателя является низкая точность стабилизации частоты вращения, обусловленная тем, что обратная связь вводится в виде сигналов переменного тока и использование любого регулятора, отличного от
пропорционального, приведет к неработоспособности вентильного электродвигателя. Целью изобретения является повышение точности стабилизации частоты вращения.
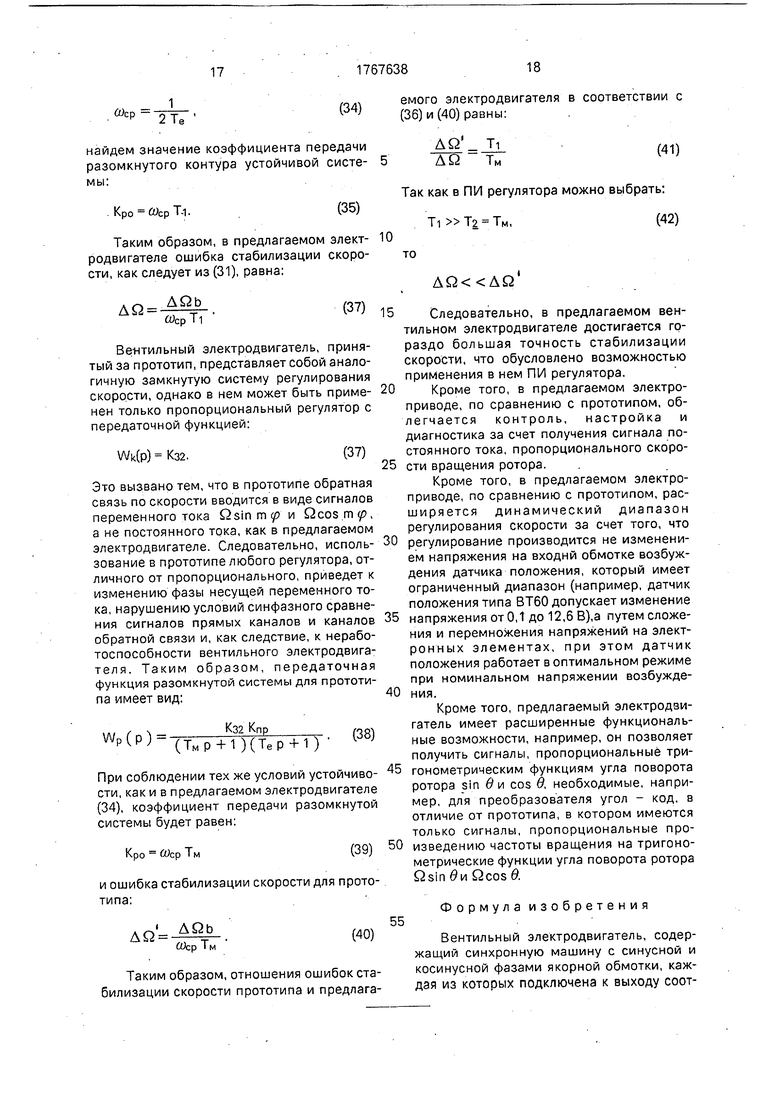
Указанная цель достигается тем, что в вентильном электродвигателе, содержащем синхронную машину с синусной и косинусной фазами якорной обмотки, каждая из ко- торых подключена к выходу
соответствующего усилителя мощности, установленный на валу синхронной машины датчик положения ротора с основной и квадратурной обмотками возбуждения и синусной и косинусной выходными обмотками,
четыре запоминающих элемента, сигнальные входы первого и третьего, второго и четвертого запоминающих элементов попарно объединены и соединены соответственно с синусной и косинусной выходными
обмотками датчика положения ротора, основная и квадратурная обмотки возбуждения которого подключены к выходам соответственно генератора опорного напряжения и источника постоянного напряжения, выходы первого и второго запоминающих элементов, управляющие входы которых объединены, подключены к первым входам первого и второго двухвхо- довых сумматоров, а выходы третьего и четвертого запоминающих элементов, управляющие входы которых объединены, подключены к входам соответствующих инверторов, в отличие от прототипа, генератор опорных напряжений снабжен квадратурным выходом и введены третий, четвертый и пятый двухвхолдовые сумматоры, входы третьего сумматора соединены с выходами соответственно первого запоминающего элемента и первого инвертора, а входы четвертого сумматора - с выходами второго запоминающего элемента и второго инвертора, два ш иротно-импульсных преобразователя, входами подключенные к выходам соответственно первого и второго сумматоров, вторые входы которых подключены к выходам соответственно третьего и четвертого запоминающих элементов, четыре переключателя, последовательно соединенные задатчик частоты вращения, двухвходовый блок сравнения и регулятор скорости, выход которого подключен к сигнальным входам первого и второго переключателей, сигнальные входы третьего и четвертого переключателей соединены соответственно с выходами третьего и четвертого сумматоров, а попарно объединенные управляющие входы первого, третьего и второго, четвертого переключателей связаны с выходами соответственно первого и второго широтно-импульсных преобразователей, выходы первого и второго переключателей через дополнительно введенные фильтры нижних частот подключены соответственно к входам первого и второго усилителей мощности, последовательно соединенные компаратор и третий инвертор, вход компаратора подключен к квадратурному выходу генератора опорного напряжения, а выходы компаратора и третьего инвертора соединены соответственно с входами дополнительно введенных первого и второго формирователей импульсов, выходы которых подключены к объединенным управляющим входам соответственно первого, второго и третьего, четвертого запоми- нающих элементов, входы пятого сумматора соединены с выходами третьего и четвертого переключателей, а его выход - через дополнительно введенный третий фильтр нижних частот подключен ко второму входу блока сравнения.
На фиг.1 представлена функциональная схема предлагаемого вентильного электродвигателя; на фиг. 2 - 6 - фрагменты принципиальной электрической схемы устройства; на фиг.7-диаграммы напряжений предлагаемого вентильного электродвигателя; на фиг.8 - структурная схема вентильного электродвигателя.
Предлагаемый вентильный электродвигатель (фиг, 1) содержит синхронную машину 1 с синусной 2 и косинусной 3 фазами якорной обмотки, каждая из которых подключена к выходу соответствующего усилителя мощности 4 и 5, установленный на валу синхронной машины 1 датчик 6 положения ротора с основной 7 и квадратурной 8 обмотками возбуждения и синусной 9 и коси0 нусной 10 выходными обмотками, четыре запоминающих элемента 11, 12, 13 и 14, сигнальные входы первого 11 и третьего 13, второго 12 и четвертого 14 запоминающих элементов попарно объединены и соедине5 ны соответственно с синусной 9 и косинусной 10 выходными обмотками датчика 6 положения ротора. Основная 7 и квадратур- ( ная 8 обмотки возбуждения датчика 6 положения ротора подключены к выходам
0 соответственно генератора 15 опорного напряжения и источника 16 постоянного напряжения. Выходы первого 11 и второго 12 запоминающих элементов, управляющие входы которых объединены, подключены к
5 первым входам первого 17 и второго 18 двухвходовых сумматоров. Выходы третьего 13 и четвертого 14 запоминающих элементов, управляющие входы которых объединены, подключены к входам соответ0 ствующих инверторов 19 и 20.
В отличие от прототипа, генератор 15 опорных напряжений снабжен квадратурным выходом и в вентильный электродвигатель введены третий 21, четвертый 22 и
5 пятый 23 двухвходовые сумматоры. Входы третьего 21 сумматора соединены с выходами соответственно первого 11 запоминающего элемента и первого 19 инвертора, входы четвертого 22 сумматора соединены
0 с выходами второго 12 запоминающего элемента и второго 20 инвертора. В электродвигателе введены также два широтно-импульсных преобразователя 24 и 25, входами подключенные к выходам соот5 ветственно первого 17 и второго 18 сумматоров. Вторые входы сумматоров 17 и 18 подключены к выходам соответственно третьего 13 и четвертого 14 запоминающих элементов. Электродвигатель также содер0 жит четыре переключателя 26, 27, 28 и 29, последовательно соединенные задатчик 30 частоты вращения, двухвходовый блок 31 сравнения и регулятор 32 скорости, выход которого подключен к сигнальным входам
5 первого 26 и второго 27 переключателей, сигнальные входы третьего 28 и четвертого 29 переключателей соединены соответственно с выходами третьего 21 и четвертого 22 сумматоров, а попарно объединенные управляющие входы первого 26 и третьего 28,
второго 27 и четвертого 29 переключателей связаны с выходами соответственно первого 24 и второго 25 широтно-импульсных пре- образователей, выходы первого 26 и второго 27 переключателей через дополнительно введенные фильтры 33 и 34 нижних частот подключены соответственно к входам первого 4 и второго 5 усилителей мощности, последовательно соединенные компаратор 35 и третий инвертор 36, вход компаратора 35 подключен к квадратурному выходу генератора 15 опорного напряжения, а выходы компаратора 35 и третьего инвертора 36 соединены соответственно с входами дополнительно введенных первого 37 и второго 38 формирователей импульсов, выходы которых подключены к объединенным управляющим входам соответственно первого 11, второго 12 и третьего 13, четвертого 14 запоминающих элементов. Входы пятого сумматора 23 соединены с выходами третьего 28 и четвертого 29 переключателей, а его выход - через дополнительно введенный третий фильтр 39 нижних частот подключен ко второму входу блока 31 сравнения.
Запоминающие элементы 11,12,13 и 14 имеют аналогичные схемы и могут быть выполнены, например, на операционном усилителе 40 (см.фиг.2), работающем в режиме повторителя, к неинвертирующему входу которого подключен конденсатор 41, подключаемый также к синусной обмотке 9 датчика 6 положения ротора через ключ на полевом транзисторе 42. Затвор полевого транзистора 42 подключен к выходу формирователя импульсов 37.
Переключатели 26, 27, 28 и 29 имеют аналогичные схемы и могут быть выполнены на усилителе с единичным переключаемым коэффициентом усиления Кус, например, на операционном усилителе 41 (см.фиг.З), входы которого соединены с выходом сумматора 21 через резисторы 42 и 43. В цепь обратной связи включен резистор 44, а не- инвертирущий вход усилителя соединен также с общей шиной 45 через ключ, выполненный на транзисторе 46. При открытом транзисторе Кус. -1, при закрытой Кус-1. На базу транзистора 46 через резистор 47 подано управляющее напряжение с выхода широтно-импульсного преобразователя 24.
Широтно-импульсный преобразователь 24 (25) (см.фиг.4) может быть выполнен, например, на интеграторе и компараторе, выполненных на операционных усилителях 48 и 49, охваченных обратной связью через резистор 50. Инвертирующий вход операционного усилителя 48 через резистор 51
подключен к выходу сумматора 17 (18), а в цепь обратной связи операционного усилителя 48 включен конденсатор 52. Компаратор49широтно-импульсного
преобразователя 24 работает в скользящем режиме, при этом напряжение на его входе близко к нулю, а напряжение на его выходе представляет из себя широтно-модулирован- ные прямоугольные импульсы с частотой
10-20 кГц, среднее значение которых уравновешивает входное напряжение преобразователя, поступающее на инвертирующий вход интегратора на усилителе 48. Напряжение на выходе интегратора в этом случае
постоянно и равно нулю.
Компаратор 35 (см.фиг.5) может быть выполнен, например, на операционном усилителе 53 с большим коэффициентом усиления без обратной связи, инвертирующий
вход которого соединен с квадратурным выходом генератора опорных напряжений 15. Инвертор 36 (фиг.5) может быть выполнен, например, на операционном усилителе 54, включенном по схеме инвертирующего
усилителя с резистором 55 в цепи обратной связи и резистором 56, подключенным к инвертирующему входу. Резистор 56 также соединен с выходом компаратора 35.
Формирователь импульсов 38 (37)
(фиг.5) может быть выполнен, например, в виде дифференцирующей цепи на конденсаторе 57 (58) и резисторе 59 (60). Резистор 61 (62), запитанный напряжением смещения +U служит для введения положительного напряжения смещения для полевых транзисторов запоминающих элементов 11 и 12(13 и 14).
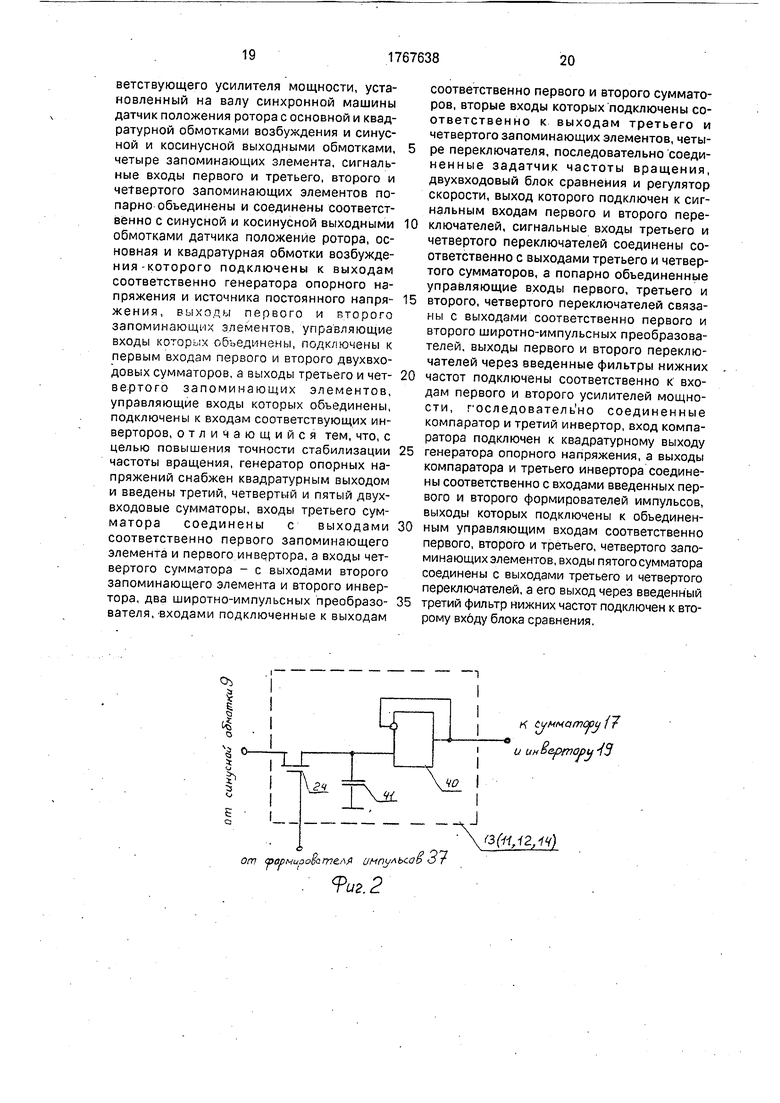
Генератор опорных напряжений 15 (см. фиг.6) может быть построен, например, на
двух интеграторах, выполненных на операционных усилителях 63 и 64, охваченных обратной связью через цепь на резисторе 65 и конденсаторе 66 Основной выход 67 соединен с выходом операционного усилителя 63, а квадратурный 68 - с выходом операционного усилителя 64. Таким образом, выходы 67 и 68 генератора разделены интегратором, что обеспечивает сдвиг сигнала на квадратурном выходе 68 на 90
эл.град. относительно сигнала на основном выходе 67. Могут быть применены и любые другие двухфазные генераторы.
Предлагаемый вентильный электродвигатель (фиг. 1) работает следующим образом.
Генератор 15 опорного напряжения формирует на своих выходах напряжения переменного тока, сдвинутые по фазе на 90 эл. градусов:
Uoi АО sin-w t,
Uo2 АО COS О) I,
где (У-частота опорного напряжения;
АО - амплитуда опорного напряжения.
На обмотку 7 возбуждения датчика положения 6 поступает напряжение возбужде- ния:
Ub Uoi АО sin cot,(2)
создающее ток возбуждения ь
Ub
dt Aocol
COS 0)1
где L -.индуктивность обмотки 7 возбуждения.
Последнее выражение справедливо, если пренебречь активным сопротивлением обмотки 7 возбуждения, что обычно выполняется в датчиках положения вентильных электродвигателей при достаточно высокой частоте ft) опорного напряжения.
Напряжение Do источника 16 постоянного напряжения создает в квадратурной обмотке 8 возбуждения постоянный ток 0:
Uo
R
где R - активное сопротивление квадратурной обмотки 8 возбуждения.
Будем рассматривать в качестве датчика 6 положения бесконтактный синусно-ко- синусный вращающийся трансформатор типа редуктосин.
Потокосцепление гр синусной 9 и косинусной 10 обмоток редуктосина определяется токами взаимно-перпендикулярных обмоток 7 и 8 возбуждения в соответствии с выражениями:
$э -Км Пь sin(m f + в)+ + I0cos(m p + Vio -Км ib cos(m р + в)+ + I0sin(m р + в), (5)
где р- угол поворота ротора;
m - число пар полюсов (число электрической редукции редуктосина);
в- пространственный сдвиг фаз;
Км - конструктивный параметр,определяемый схемой намотки и харак
теристиками магнитопровода датчика 6 положения.
Знаки в выражениях (5) для потокосцеп- ления определяются направлением включе- 5 ния обмоток 7, 8, 9, 10.
В дальнейшем будем считать, что пространственный сдвиг фаз в 0, что достигается начальным разворотом статора датчика 6 положения.
10 По закону электромагнитной индукции ЭДС, наводимая в синусной 9 и косинусной 10 обмотках, равна:
15
dt
(6)
Тогда, предполагая достаточно большую величину, сопротивления нагрузки (ре- жим холостого хода вращающегося трансформатора), получим напряжение на выходе синусной обмотки 9:
25
U9 E,
.1Ј dt d(p dt /
- I d#3 t д(рэ o
30 --(dr+-ifQ)
(7}
где Q - частота (скорость) вращения ротора синхронной машины 1.
Выражение (7) получено в соответствии с правилом дифференцирования сложной функции.
Подставляя в (7) выражение (5), получим после преобразований:
55
Ug Ug(c) + Ug(K)+ Ug, KM
(8)
rfleU9(c) -;- AoSin a) tsinm p синфазная
45 высокочастотная составляющая; (9)
KM m Q . Ug(K) - -j Aocos 0) cpквадратурная высокочастотная составляющая(10) 50иу
Ug Км Qsinm (p - низкочастотная
составляющая (11)
Синфазная (9) и квадратурная (10) составляющие определяются относительно фазы опорного напряжения.
Напряжение Ug поступает на сигнальные входы запоминающих элементов 13 и 11 (фиг.7 а,Ь,с), на управляющие входы которых подаются короткие импульсы с выходов
формирователей импульсов 37 и 38 соответственно. Импульсы формирователя импульсов 38 формируются из опорного напряжения Uo2 путем дифференцирования сигнала компаратора 35 (фиг.7с,е,т). При отсутствии импульсов полевой транзистор 42 (фиг.2) заперт положительным напряжением смещения. Открывание транзистора 42 осуществляется коротким импульсом отрицательной полярности (см.фиг.7,f). При этом конденсатор 41 (фиг.2) заряжается до амплитудного значения напряжения Ug которое хранится на конденсаторе 41 в промежутках между импульсами. Напряжение с конденсатора 41 передается операционным усилителем 40, работающим в режиме повторителя, на выход запоминающего элемента 13. Аналогично работает формирователь импульсов 37, на вход которого через инвертор 36 подаются импульсы с компаратора 35, сдвинутые по фазе на 180° (фиг.7, h) относительно импульсов формирователя импульсов 38. Как следует из фиг.7 g и к, значения напряжения на выходах запоминающих элементов 13 и 11 соответственно равны
(c)l+ Ug
V0
R
Q) sinm (p
где ( ll (c)I- Ug
i/ / АО , V0 K.M I
L
+
Q) sinm p
An sinm p.
03)
гдеАц Км().
Квадратурная высокочастотная составляющая (10) запоминающими элементами 13 и 11 подавляется, так как их полевые транзисторы открываются в моменты:
0)1 П -у- И
3 л п 0) п , п 1, 2когда
KMm Q
Ug(k)
Lu
AcCOSWt X
0
5
X cos m p 0 .
Таким образом, на выходе запоминающего элемента 13 формируется сигнал суммы составляющих сигналов с амплитудами
АО V0Q -г- и -5- а на выходе запоминающего
элемента 11 - сигнал разности тех же составляющих.
Полученные сигналы поступают на инвертор 19 и сумматоры 21 и 17. Напряжения на выходах сумматоров 21 и 17 равны:
U2i -Ui3+ Uii
-KM()sinmp +
Q) sinm
+ KM( -:;КМ Ui Ui3+Un
KM(
(14)
)sinmp +
30
+ КМ(4
+ -Q)sinmp
35
2KM
L
sinm p.
(15)
Таким образом, на выходах сумматоров 21 и 17 составляющие сигналы разделяются.
Выходной сигнал сумматора 17 подается на вход широтно-импульсного преобразователя 24, выходной сигнал которого представляет собой широтно-модулирован- ный сигнал со скважностью, равной:
У24 K24U17,
где К24 - коэффициент пропорциональности.
Среднее значение выходного напряжения переключателя 26, на сигнальный вход которого подано выходное напряжение регулятора 32 Us2, а на управляющий вход - выходное напряжение широтно-импульсного преобразователя 24, равно
U26 U32 Y2A U32K24U17. 2К24КМ
А26 sinm p, где -г(16)
U32.
Аналогичным образом, напряжение на выходе переключателя 27 равно(
Ua А2 cosm р, (17) гдеА27 2КмК25- г-из2.
Средние значения выходных напряжений переключателей 26 и 27, представляющие собой произведения выходного напряжения регулятора на тригонометрические функции угла поворота ротора, выделяются на фильтрах нижних частот 33 и 34 соответственно и после усиления в усилителях мощности 4 и 5 поступают на фазные обмотки 2 и 3 синхронной машины 1 в виде фазных напряжений:
КззК411з2
(18) 25
30
2КМК25
Ас
K34K5U32,
Кзз, Кз4 - коэффициенты передачи филь- тров нижних частот 33 и 34;
Кз, Ks - коэффициенты усиления усилителей мощности 4 и 5.
В соответствии с принципом действия вентильного электродвигателя напряжения U4 и Us образуют в расточке статора синхронной машины 1 вращающееся магнитное поле, которое создает вращающий момент двигателя, приводящий ротор во вращение с частотой, пропорциональной амплитуде фазных напряжений Щ и Us. Следовательно, установившееся значение частоты вращения
Ј2 Квд Аф
Квд 2КМК24 - K33K4U32
KnpU32,
(19)
где Квд- коэффициент, определяемый конструктивными параметрами синхронной машины 1;
Кпр 2КмК24
К4КззКвд.
В переходных режимах частота вращения вентильного двигателя описывается выражением (в преобразованиях Лапласа)
Q(p) Wnp(p)U32,
(20)
где Wnp(p)
К
пр
(ТмР + 1)(ТеР + 1) П6
редаточная функция вентильного электродвигателя (21)
Тм - механическая постоянная времени;
Те - электрическая постоянная времени;
та
р - оператор Лапласа.
Таким образом, во всех режимах частовращения предлагаемого вентильного электродвигателя пропорциональна выходному напряжению регулятора.
Среднее значение выходного напряжения переключателя 28, на сигнальный вход которого подано выходное напряжение сумматора 21 U21, а на управляющий вход - выходное напряжение широтно-импульсно- го преобразователя 24 равно:
U28 LJ21 24
-2 Км- -Qsinmp K24Ui7
-2KM- -Qsin mpK24 X
А
40
X 2KM-:pSin
-4KM
R
К24 & sin m p
45
K28 Ј2 sin2 m p ,
(22)
где K28 -4KM2K24
Аналогичным образом, среднее значение выходного напряжения переключателя 29:
U29 K2g Qcos2m р, гдеК29 -4Км2К25
(23)
2|/„ voA0
RL
Выходные напряжения переключателей 28 и 29 суммируются на сумматоре 23,
среднее значение суммы выделяется на фильтре нижних частот 39 в виде напряжения изэ:
U39(A28 Qsin2m р + + А29 Qcos2m р) Кзэ Кзэ Q Где К39 К28К39 К29 Кз9.
(24)
Таким образом, выходное напряжение фильтра нижних частот 39 прямо пропорционально частоте вращения ротора синхронной машины 1.
Выходное напряжение блока сравнения 31, на первый вход которого подано напряжение уставки скорости Uy от задатчика частоты вращения 30, а на второй вход - напряжение изэ фильтра нижних частот 39 подается на вход регулятора 32.
При использовании ПИ регулятора его передаточная функция имеет вид
(р)птр2р+;1)
(25)
где TI и Т2 - pa; TI Т2;
постоянные времени регулятоК32 Т1/Т2.
Тогда преобразование Лапласа для напряжения на выходе регулятора 32 равно:
U32(p) Wk(p) (Uy-Uag).
(26)
Подставляя (26) в (19) с учетом (24), получим:
Q KnpWk(p)Uy-K39Q
(27)
Разрешая полученное уравнение относительно Q найдем:
Q Кпр Wk ( р )
1 + Кпр Wk ( р ) Кзэ
Uv.
Для правильной работы вентильного электродвигателя необходимо выполнение 50 условия:
IKnpWk(p)K39l 1,
(29)
тогда установившаяся скорость элетродви гателя, как следует из (28), равна:
Q
Uy К39
(30)
0
5
0
5
0
Таким образом, предлагаемое устройство поддерживает частоту вращения вентильного электродвигателя пропорциональной напряжению уставки частоты вращения Uy.
Положительный технический эффект от применения предлагаемого изобретения по сравнению с прототипом заключается в повышении точности стабилизации скорости.
Указанный эффект подтверждается следующим расчетом.
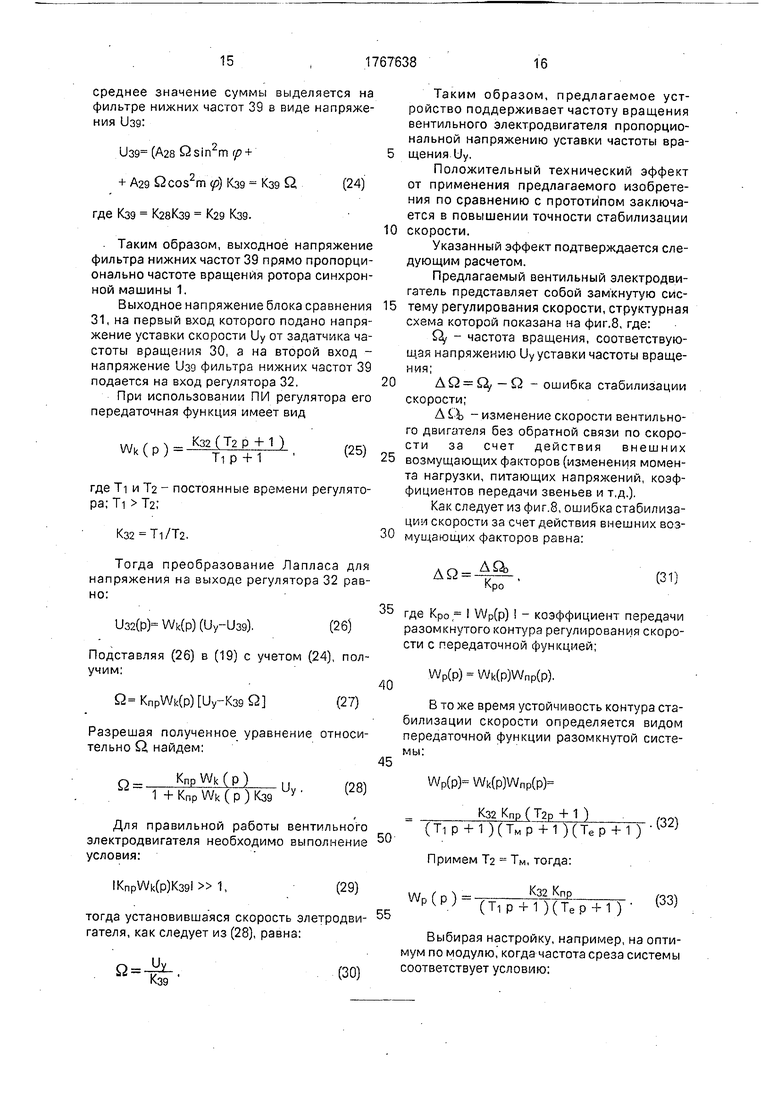
Предлагаемый вентильный электродвигатель представляет собой замкнутую систему регулирования скорости, структурная схема которой показана на фиг.8, где:
О/ - частота вращения, соответствующая напряжению Uy уставки частоты вращения;
AQ Q/-Q -ошибка стабилизации скорости;
А Ы - изменение скорости вентильного двигателя без обратной связи по скорости за счет действия внешних возмущающих факторов (изменения момента нагрузки, питающих напряжений, коэффициентов передачи звеньев и т.д.).
Как следует из фиг.8, ошибка стабилизации скорости за счет действия внешних возмущающих факторов равна:
Л0 АО,
Ai Ьс: - - , -ро
(31)
где Кр0 I Wp(p) - коэффициент передачи разомкнутого контура регулирования скорости с передаточной функцией;
Wp(p) Wk(P)Wnp(p).
В то же время устойчивость контура стабилизации скорости определяется видом передаточной функции разомкнутой систе45
мы:
50
Wp(p) Wk(p)Wnp(p)
К32 Кпр ( Т2р + 1 )
(Tip + 1)(TMp + 1)(Tep + 1 ) Примем Та Тм, тогда:
.(32)
55
w -TfnrrfeTiT- (33)
Выбирая настройку, например, на оптимум по модулю, когда частота среза системы соответствует условию:
«fcp-2j;
найдем значение коэффициента передачи разомкнутого контура устойчивой системы:
Kpo WcpT-i.
(35)
Таким образом, в предлагаемом элект- 10 родвигателе ошибка стабилизации скорости, как следует из (31), равна:
AQ
AQb
WcpTl
Вентильный электродвигатель, принятый за прототип, представляет собой аналогичную замкнутую систему регулирования скорости, однако в нем может быть применен только пропорциональный регулятор с передаточной функцией:
WK(P) Кз2.
Это вызвано тем, что в прототипе обратная связь по скорости вводится в виде сигналов переменного тока Qsinm и Qcosm, а не постоянного тока, как в предлагаемом электродвигателе. Следовательно, использование в прототипе любого регулятора, отличного от пропорционального, приведет к изменению фазы несущей переменного тока, нарушению условий синфазного сравнения сигналов прямых каналов и каналов обратной связи и, как следствие, к неработоспособности вентильного электродвигателя. Таким образом, передаточная функция разомкнутой системы для прототипа имеет вид:
р(Р)°(Тир+К1)(Т.Р+1Г «ЭД
При соблюдении тех же условий устойчивости, как и в предлагаемом электродвигателе (34), коэффициент передачи разомкнутой системы будет равен:
Кро - СОср Тм
и ошибка стабилизации скорости для прототипа:
AQ -AQb
ft)cpTM
Таким образом, отношения ошибок стабилизации скорости прототипа и предлага(34)
емого электродвигателя в соответствии с (36) и (40) равны:
Ti Тм
(41)
Так как в ПИ регулятора можно выбрать: TM,(42)
то
AQ«AQ
15 Следовательно, в предлагаемом вентильном электродвигателе достигается гораздо большая точность стабилизации скорости, что обусловлено возможностью применения в нем ПИ регулятора.
20 Кроме того, в предлагаемом электроприводе, по сравнению с прототипом, облегчается контроль, настройка и диагностика за счет получения сигнала постоянного тока, пропорционального скоро25 сти вращения ротора.
Кроме того, в предлагаемом электроприводе, по сравнению с прототипом, расширяется динамический диапазон регулирования скорости за счет того, что
30 регулирование производится не изменением напряжения на входнй обмотке возбуждения датчика положения, который имеет ограниченный диапазон (например, датчик положения типа ВТ60 допускает изменение
35 напряжения от 0,1 до 12,6 В),а путем сложения и перемножения напряжений на электронных элементах, при этом датчик положения работает в оптимальном режиме при номинальном напряжении возбужде40 ния.
Кроме того, предлагаемый электродвигатель имеет расширенные функциональные возможности, например, он позволяет получить сигналы, пропорциональные три45 гонометрическим функциям угла поворота ротора sin в и cos в, необходимые, например, для преобразователя угол - код, в отличие от прототипа, в котором имеются только сигналы, пропорциональные про50 изведению частоты вращения на тригонометрические функции угла поворота ротора Qsin Qcos в.
55
Формула изобретения
Вентильный электродвигатель, содержащий синхронную машину с синусной и косинусной фазами якорной обмотки, каждая из которых подключена к выходу соответствующего усилителя мощности, установленный на валу синхронной машины датчик положения ротора с основной и квадратурной обмотками возбуждения и синусной и косинусной выходными обмотками, четыре запоминающих элемента, сигнальные входы первого и третьего, второго и четвертого запоминающих элементов попарно объединены и соединены соответственно с синусной и косинусной выходными обмотками датчика положение ротора, основная и квадратурная обмотки возбуждения-которого подключены к выходам соответственно генератора опорного напряжения и источника постоянного напря- жения, выходы первого и второго запоминающих элементов, управляющие входы которых объединены, подключены к первым входам первого и второго двухвхо- довых сумматоров, а выходы третьего и чет- вертого запоминающих элементов, управляющие входы которых объединены, подключены к входам соответствующих инверторов, отличающийся тем, что, с целью повышения точности стабилизации частоты вращения, генератор опорных напряжений снабжен квадратурным выходом и введены третий, четвертый и пятый двух- входовые сумматоры, входы третьего сумматора соединены с выходами соответственно первого запоминающего элемента и первого инвертора, а входы четвертого сумматора - с выходами второго запоминающего элемента и второго инвертора, два широтно-импульсных преобрази- вателя, входами подключенные к выходам
съ
I
V
U
I1
о Ј
Q
ОСП
(oopf-ujpo Qine fl импульса о т
Фиг. 2
соответственно первого и второго сумматоров, вторые входы которых подключены со- ответственно к выходам третьего и четвертого запоминающих элементов, четыре переключателя, последовательно соединенные задатчик частоты вращения, двухвходовый блок сравнения и регулятор скорости, выход которого подключен к сигнальным входам первого и второго переключателей, сигнальные входы третьего и четвертого переключателей соединены соответственно с выходами третьего и четвертого сумматоров, а попарно объединенные управляющие входы первого, третьего и второго, четвертого переключателей связаны с выходами соответственно первого и второго широтно-импульсных преобразователей, выходы первого и второго переключателей через введенные фильтры нижних частот подключены соответственно к входам первого и второго усилителей мощности, последовательно соединенные компаратор и третий инвертор, вход компаратора подключен к квадратурному выходу генератора опорного напряжения, а выходы компаратора и третьего инвертора соединены соответственно с входами введенных первого и второго формирователей импульсов, выходы которых подключены к объединенным управляющим входам соответственно первого, второго и третьего, четвертого запоминающих элементов, входы пятого сумматора соединены с выходами третьего и четвертого переключателей, а его выход через введенный третий фильтр нижних частот подключен к второму входу блока сравнения.
Фи.3
ъ
JS I
-. S(
iЈ
еЧ 1
5 Г
1
§
в к с.уынвто у 23
Фиг 5
и,
К йа катке 7 положения В
К КОкпарзтири -О
j6|
|
S
т иг. о
Фиг. 8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
