с преобразователем 1 силы подаются на сумматор-усилитель 10, а с его выхода - на вертикальную развертку ij., На горизонтальную развертку jf подается
Изобретение относится к испытательным установкам для исследования механических х арактеристик приводов регулирующих органов, а также может быть использовано в электротехнической промышленности и машиностроении для определения тяговых характеристик механизмов, подвижньй элемент KOTOIM IX перемещается на большие расстояния.
Целью изобретения является повьш1е.- ние производительности труда, расши- . рёние функциональных возможностей и снижение стоимости устройства за счет выполнения нагружающего узла,, воздей- ствунщего на боковую образукяцую по- верхность якоря привода, исключения несущего корпуса и установочного стола, п двешивания устройства к корпусу, исследуемого привода систёмь управления.
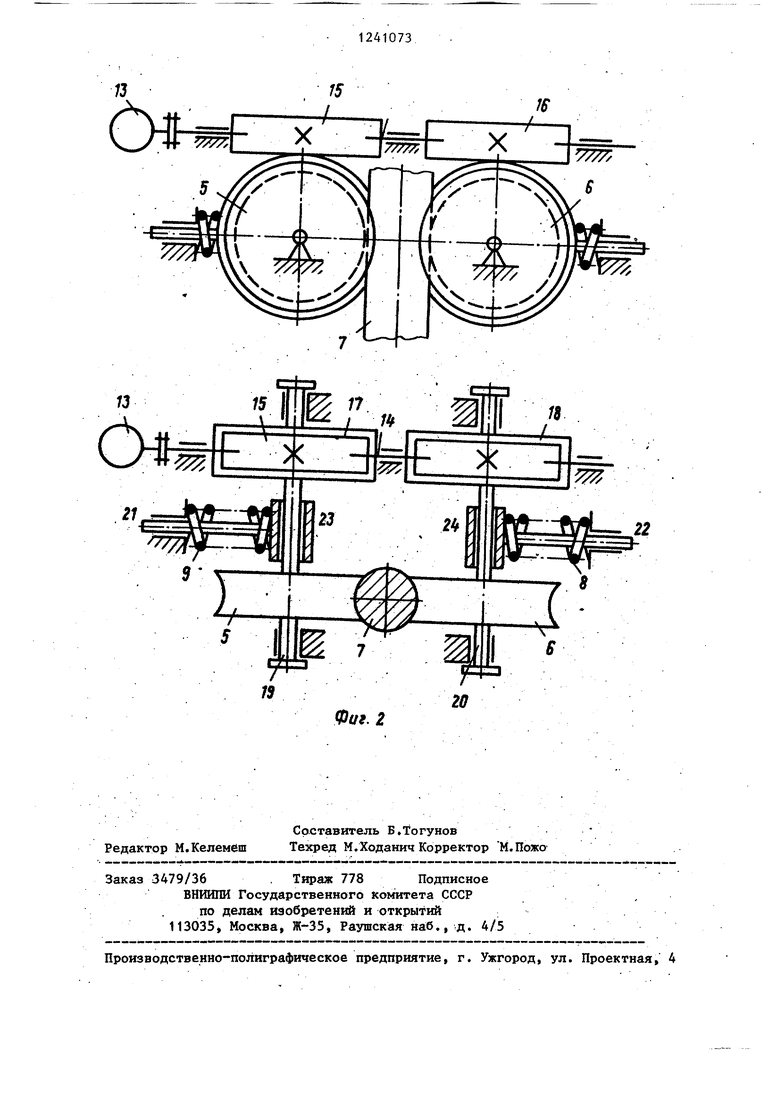
На фиг.1 изобрежено устройётво для определения механических характеристик приводов систем управления и защиты, общий вид на фиг.2 - кинематическая схема передачи нагружающего усилия от приводного электродвигателя нагружающего узла к якорю привода системы управления..
Устройство содержит два преобразователя 1 силы, одни концы котор1 пс жестко прикреплены-к установочной плите 2, закрепляемой болтами на корпусе 3 исследуемого привода а другой - к корпусу нагружающего узла 4, который, сод ержит фрикционные ролики. 5 и 6, прижимаемые к якорю 7 привода системы управления пружинами 8 и 9.
Устройство также содержит сумматор-усилитель 10, входы которого подключены к выходам преобразователей t силы, регистрирующий блок 11, первый вход которого соединен с выходом преобразователя 12 перемещения, закрепленного на установочной платформе 2, второй вход - с выходом сзгмматора- усилителя 10.
выходной сигнал с преобразователя 12 перемещений, который после-закрепления установочной плиты 2 также соединяется с якорем 7. 2 ил. .
Йа показан приводной электродвигатель 13, вал которого сочленен с винтом 14, один участок 15 которого выполнен правоходовым, а другой участок 16 - левоходовым. Винт 14 находится в зацеплении с шестернями 17 и 18, насаженными на валы 19 и 20 соответственно. На этих же валах закреплены фрикционные ролики 5 и 6 соответственно. Пружины 9 и 8 надеты на консоли 21 и 22 соответственно, одни концы которых закреплены на боковой поверхности корпуса нагружающего узла 4, а на других концах закреплены втулки 23 и 24, надетые на валы 19 и 20 соответственно.. Консоли 21 и 22, а соответственно, и фрикционные ролики 5 и 6 расположены диаметрально противоположно относительно якорд 7 привода системы управления.
Устройство работает следующим образом.
Исследуемый привод системы управления поднимают и оставляют подрешен- ным в вертикальном положении на тросе подъемного крана.
Устройство с помощью установочной плиты 2 прикрепляют болтами к корпусу 3 исследуемого привода системы управления. Фрикционные ролики 5 и 6 поджимаются пружинами 9 и 8 к якорю 7 исследуемого привода.
На рабочие катушки исследуемого привода подается напряжение, создающее тяговое усилие, преодолевая которое нагружакиций узел 4 перемещает якорь 7: при вращении вала приводного электродвигателя 13 крутящий момент через червячные пары f5-17 и 16-18 передается фрикционным роликам 5 и 6 соответственно, которые, вращаясь,сообщают поступательное движение,якорю 7 исследуемого; привода, преодолевая при этом его тяговое усштае „„ , про- порционально которому изменяется выходной сигнал преобразователей 1 силы
о ходу якоря 7 5
.
1241073 Измеряемое усилие
5
ij,- и величина выходного сигнала пребразователей 1 силы связаны соотно-. eниeм
Unt +А„.Р -f (В), (1) де Aflj - чувствительность суммарная
преобразователя 1 силы, В/кг, и - выходной суммарньй сигнал с
преобразователей 1 силы (сум- .мирование и предварительное id усиление осуществляется сумматором-усилителем 10), постоянная составляющая выАПС И,,ходного напряжения преобразователя 1 силы, пропорциональная весу нагружаницего узла 4,
А Р|, - переменная составляющая вы- ° ходного напряжения преобра15
где
лин упр лям
Фо
чес упр пус ват .зац упр ющи кот пре бло с в о т цел тру
20
зователя 1 силы, пропорциональная тяговому усилию исследуемого привода (знак зависит от направления перемещения якоря 7).
Постоянная составляющая легко уот-25 раняется начальной установкой регистрирующего блока 11. В качестве регис- трир ующего блока 11 может быть исполь - зован двухкоординатный самопишущий
Устройство для одределення механических характеристик приводов систем управления и защиты, содержащее корпус с установленным на нем преобразователем перемещения с возможностью .зацепления с якорем привода системы управления, нагружающий узел, включающий приводный электродвигатель, вал - которого.соединен с винтом, первый преобразователь силы, -регистрирующий блок, аервый вход которого соединен с вьгходом преобразователя перемещения о тличающе,е ся тем, что, -с целью повьшения производительности труда, расширения функциональных возмшшивольтметр, а в качестве преобра-зо нежностей и снижения стоимости, в устройство введены второй преобразователь силы, сумматор-усилитель, два фрикционных ролика, две пружины и две шестерни, корпус устройства выполнен g виде горизонтально расположенной установочной плиты, к нижней плоскости которой .через первый и второй преобразователи силы прикреплен своей верхней горизонтальной поверхностью
зователей .1 силы - тензодатчики.
Прео&разователь 12 перемещения после закрепления установочной плиты 2 также соединяется с якорем 7 и позволяет получить на выходе напряжение,,, пропорциональное перемещению якоря 7
и
пя
А п. (ВО,
(2)
где чувствительность преобразотройство введены второй преобразователь силы, сумматор-усилитель, два фрикционных ролика, две пружины и дв шестерни, корпус устройства выполнен g виде горизонтально расположенной установочной плиты, к нижней плоскости которой .через первый и второй пр образователи силы прикреплен своей верхней горизонтальной поверхностью
вателя перемещений (В/м)
5 7 расстояние, на которое пере- р корпус нагружающего узла, на боковой
поверхности которого на консолях.
мещается якорь 7 относительно рабочих катушек исследуемого двигателя (ход якоря). Выходные сигналы с преобразоватерасположенных диаметрально противоположно относительно якоря системы уп равления, установлены, подпружиненные
лей 1 сипы подаются на сумматор-уси- j валы, на которых закреплены фрикционлитель 10, а с его выхода - на вертикальную развертку у регистрирующего блока 11, на горизонтальную развертку ОС которого подается выходной сигные ролики с возможностью поджатия .образующей лтЬверхность - к якорю системы управления и шестерни, находящиеся в зацеплении с винтом, второй
нал с преобразователя 12 перемещения.-- вход регистрирующего блока соединен
Таким образом, регистрируется тяговая характеристика привода системы управления и защиты
с выходом сумматора-усилителя, входы которого соединены с выходами преобразователей силы.
5
d
tip..
Pnp-fi
4
и (Н),
(3)
5
0
5
где FP - воспроизводимая регистриру- . кнцим блоком 11 зависимость силы тяги исследуемого объекта от положения его якоря
7;
,Ррр- тяговое усилие,развиваемое линейным двигателем привода системы управления, измеряется преобразователями 1 силы.
Формула изобретения
Устройство для одределення механических характеристик приводов систем управления и защиты, содержащее корпус с установленным на нем преобразователем перемещения с возможностью .зацепления с якорем привода системы управления, нагружающий узел, включающий приводный электродвигатель, вал - которого.соединен с винтом, первый преобразователь силы, -регистрирующий блок, аервый вход которого соединен с вьгходом преобразователя перемещения о тличающе,е ся тем, что, -с целью повьшения производительности труда, расширения функциональных возо нежностей и снижения стоимости, в ус ,
тройство введены второй преобразователь силы, сумматор-усилитель, два фрикционных ролика, две пружины и две шестерни, корпус устройства выполнен g виде горизонтально расположенной установочной плиты, к нижней плоскости которой .через первый и второй преобразователи силы прикреплен своей верхней горизонтальной поверхностью
расположенных диаметрально противоположно относительно якоря системы уп равления, установлены, подпружиненные
валы, на которых закреплены фрикционные ролики с возможностью поджатия .образующей лтЬверхность - к якорю системы управления и шестерни, находящиеся в зацеплении с винтом, второй
с выходом сумматора-усилителя, входы которого соединены с выходами преобразователей силы.
JS
Составитель Б.Тогунов редактор М.КелемешТехр д ......
чШГч479/36 Тираж 778 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий . 113035, Москва, Ж-35, Раушская .....
Производственно
,1полйграф ёско1 предприятие, г. Ужгород, ул. Проектная, 4
tpt/t. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU568561A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТЯГОВОЙ ЛЕБЕДКИ | 2019 |
|
RU2714848C1 |
| Устройство для определения тяговых характеристик электромагнитных элементов | 1980 |
|
SU901954A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВОВ С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2013 |
|
RU2550105C1 |
| УСТРОЙСТВО ДЛЯ ФРЕЗЕРОВАНИЯ ДЫМОВЫХ ТРУБ | 1989 |
|
RU2071580C1 |
| МАШИНА ТРЕНИЯ ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ АНТИФРИКЦИОННЫХ МАТЕРИАЛОВ | 2024 |
|
RU2823909C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ДЕТАЛЕЙ НА ИЗНОС | 1991 |
|
RU2020459C1 |
Изобретение относится к испытательным установкам для исследования механических характеристик приводов регулирующих органов и может быть использовано для определения тяговых характеристик различных механизмов. Цель изобретения - повышение производительности труда, расширение функциональных возможностей и снижение стоимости устройства-. Фрикционные ролики 5 и ,6 поджимаются пружинами 8 и 9 к якорю ;7 исследуемого прив.ода. При подаче напряжения на рабочие катушки нагружающий узел 4, преодолевая тяговое усилие, перемещает якорь 7 пропорционально перемещению якоря, изменяется выходной сигнал преобразователей 1 силы, жестко прикрепленных к установочной плите 2 и к корпусу нагружающего узла 4. Выходные сигналы I СП «lat.i
| Агейкин Д.И | |||
| и до | |||
| Датчики контроля и регулирования | |||
| М.: Машиностроение, 1965, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Устройство для снятия электромеханических характеристик электромагнитов с подвижным сердечником | 1976 |
|
SU607192A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
