12
Изобретение относится к приборостроению и средствам автоматики и может найти широкое применение при управлении радиотелескопами.
Целью изобретения является повы-: шение надежности системы,
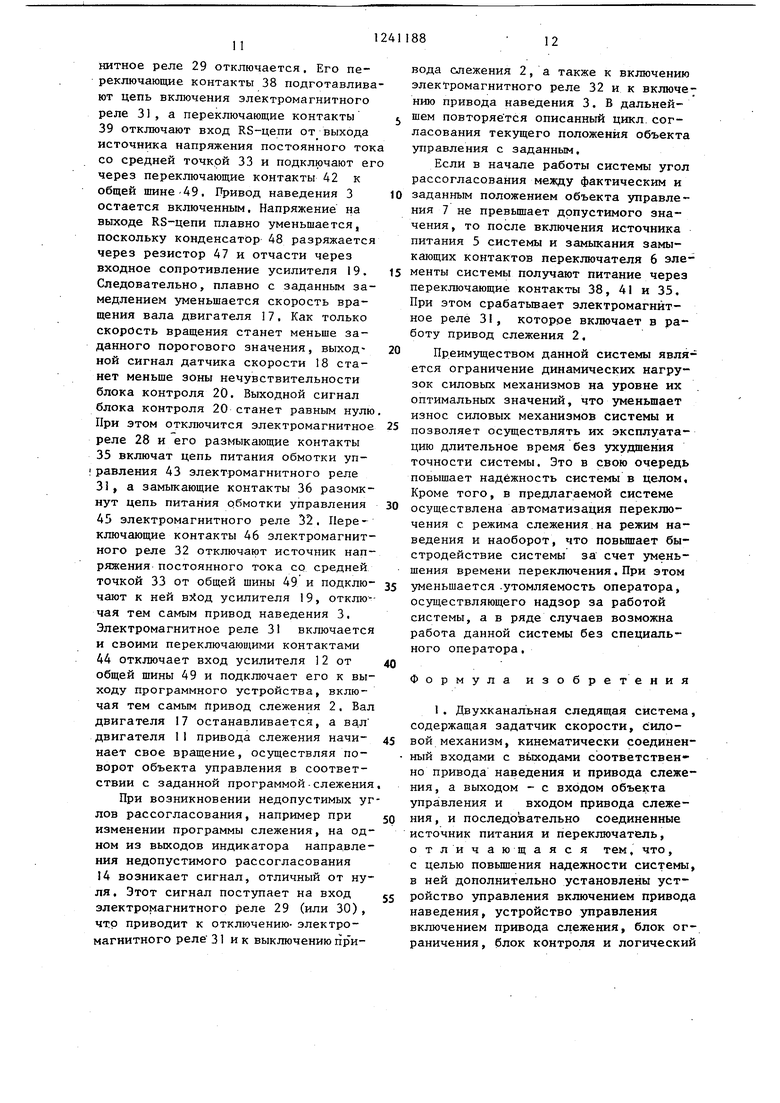
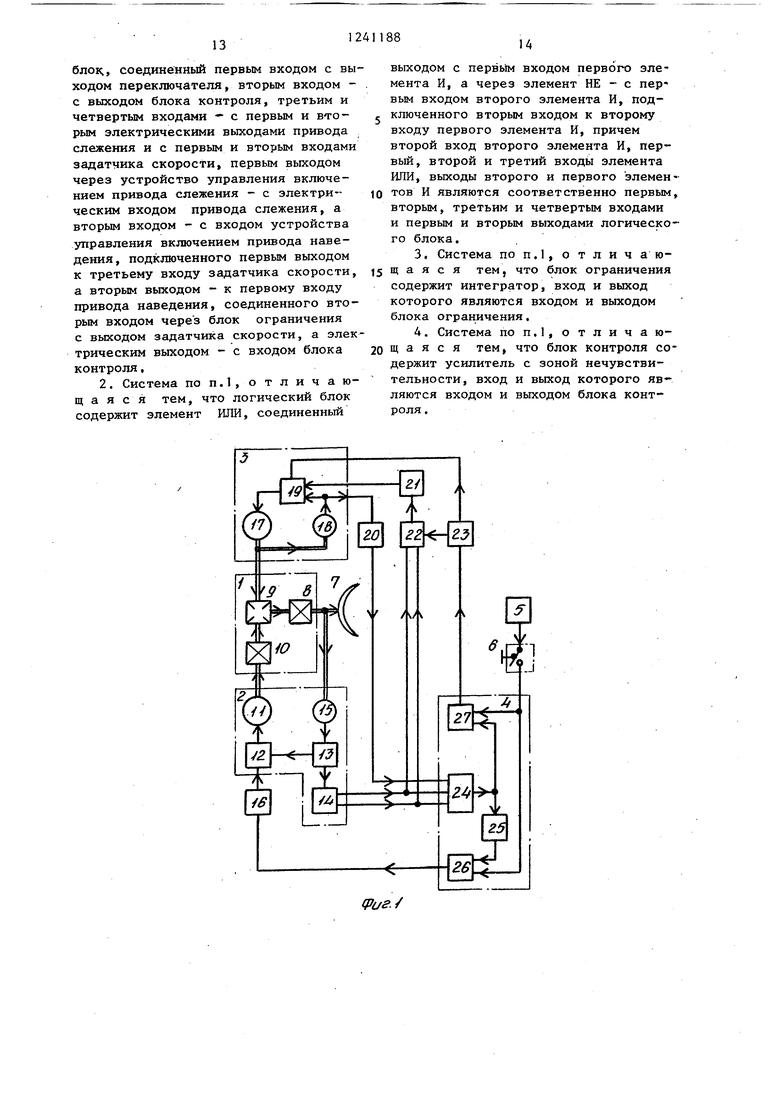
На фиг,1 показана структурная схема системы; на фиг,2 - принципиальная схема системы.
Двухканальная следящая система содержит силовой механизм 1, привод слежения 2, привод наведения 3, логический блок 4, источник питания 5, переключатель 6,-объект управления 7 редуктор 8, дифференциал 9, редуктор 10, двигатель 11, усилитель 12, программное устройство 13, индикатор направления недопустимого рассогласования 14, датчик угла 15, устройство управления включением привода слежения 16, двигатель 17, датчик скорости 18, усилитель 19, блок контроля 20, блок ограничения 21, задатчик скорости 22, устройство управления включением привода наведения 23, элемент ИЛИ 24, элемент НЕ 25, второй и первый элементы И 26, 27, электромагнитные реле 28 - 32, источник напряжения постоянного тока со средней точкой 33, обмотку управления 34 и размыкающие 35 и замыкающие 36 контакты электромагнитного реле 28, обмотку управления 37 и переключающие контакты 38, 39 электромагнитного реле 29, обмотку управления 40 и переключающие контакты 41, 42 электромагнитного реле 30, обмотку управления 43 и переключающие контакты 44 электромагнитного реле 31 обмотку управления 45 и переключающие контакты 46 электромагнитного реле 32, резистор 47, конденсатор 48, общую шину 49.
Силовой механизм 1 содержит редукторы 8, 10 и дифференциал 9,,
Привод слежения 2 содержит двигатель 11, усилитель 12, программное устройство 13, индикатор направления недопустимого рассогласования 14 и датчик угла 15,
Привод наведения 3 содержит двигатель 17, датчик скорости 18 и усилитель 19.
Логический блок 4 содержит элемент ПОИ 24, элемент НЕ 25, элементы И 26, 27,
Система, представленная на фиг,1, работает следующим образом.
81
Объект управления 7 через редуктор 8 и дифференциал 9 кинематически связан с выходом привода наведения 3, а через дифференциал 9 и редуктор 10 - с выходом привода слежения 2, Двигатель 11 привода слежения 2 соединен с выходом усилителя 12, обеспечивающего питание двигателя 11. Первый вход усилителя 12 соединен с
выходом программного устройства 13, подключенного вторым выходом к входу индикатора направления недопустим9- го рассогласования 14, которьй имеет два выхода, соединенные с соответствующими входами логического блока 4 и задатчика скорости 22, Вход программного устройства соединен с выходом датчика угла 15, установленного на оси объекта управления 7 и конт1ролирующего его фактическое положение. Устройство управления включением привода слежения 16 обеспечивает включение привода слежения 2 путем воздействия на его цепь питания или
на цепь управления усилителем 12.
Вход устройства управления включением привода слежения 16 соединен с первым выходом логического блока 4, Программное устройство 13 формирует
сигнал управления привода слежения 2, пропорциональный углу рассогласования между фактическим и заданным положениями объекта управления 7. Индикатор направления недопустимого
рассогласования 14 при возникновении недопустимого рассогласования формирует сигналы, указьшающие направление, в котором должен вращаться вал двигателя 17 привода наведения 3
для согласования фактического положения объекта управления 7 с положением, заданным программой слежения. Величина допустимого рассогласования определяется углом торможения
двигателя 17 привода.наведения 3 при максимальной начальной скорости объекта управления 7 и при его ускорении, не превьппающем некоторой допустимой величины.
Двигатель 17 привода наведения 3 кинематически связан с датчиком скорости 18, например тахогенератором, и соединен входом с выходом усилителя 19, обеспечивающего питание дви- гателя 17. Третий вход усилителя 19 соединен с выходом датчика скорости 18 и с входом блока контроля 20, который осуществляет контроль величи31
ны скорости привода наведения 3. Блок контроля 20 может быть выполнен в виде усилителя с зоной нечувствительности, напряжение на выходе которого не меняется после достижения двигателем I7 некоторой выбранной скорости. Выход блока контроля 20 соединен с вторым входом логического блока 4, Второй вход усилителя 19 соединен с выходом блока ограничения 21, который осуществляет ограничение скорости изменения величины управляющего напряжения привода наведения 3 Блок ограничения 2I может быть вьтол иен в,виде интегратора или в виде RS-депочки, напряжение на выходах которых меняется плавно с одинаковой постоянной времени при подаче и снятии их входных сигналов. Вход блока ограничения 21 соединен с выходом задатчика скорости 22, имеющего в своем составе трехпозиционный переключатель, который обеспечивает переключение полярности или фазы выходного напряжения задатчика скорости 22 и отключение этого напряжения. Входы трехпозиционного переключателя задатчика скорости 22 соединен с соответствующими выходами индикатора направления недопустимого рассогла- сования 14,
Устройство управления включением привода наведения 23 обеспечивает включение привода наведения 3 путем воздействия на цепи питания усилите- ля 19 и задатчика скорости 22 или на цепи управления усилителя 19. Вход устройства управления включением привода наведения 23 соединен с вторым выходом логического блока 4, В усили теле 19 из напряжений, поступающих на все его входы, формируется сигнал управления, пропорциональный напряжению на выходе блока ограничения 21 в переходном режиме, а в уста новившемся режиме - пропорциональный напряжению на выходе задатчика скорости 22, Блок ограничения 21 ограничивает величину ускорения вала двигателя 17. Величина его постоянной времени выбирается из условия обеспечения такого ускорения объекта управления 7, при котором динамические нагрузки в силовом механизме I были бы оптимальны, особенно это касается зубчатой пары редуктора 8, непосредственно соединенной с объектом управления 7, Износ этой пары в наи
8 4 большей степени влияет на точность силового механизма I в целом и соответственно на надежность системы в целом. Блок контроля 20 фиксирует наличие скорости, величина которой превьшает определенное значение, Ширина зоны нечувсвительности усилителя блока контроля 20 определяется величиной скорости, при которой отклю- чение двигателя 17 привода наведения 3 не вызывает динамических нагрузок на силовой механизм 1, превышающих оптимальные,
Если положение объекта управления 7 не совпадает с заданным положением и угол рассогласования этих положений превьшает допустимое значение, то после подключения источника питания 5 системы с помощью переключателя 6 с выхода индикатора направления не- допустимого рассогласования 14 на один из входов элемента ИЛИ 24 и на один из входов трехпозиционного переключателя задатчи1$а скорости 22 поступает -сигнал, фиксирующий направление рассогласования, По этому сигналу трехпозиционный переключатель задатчика скорости 22 подготавливает его к выдаче управляющего напряжения, полярность (или фаза) которого обеспечивает вращение вала двигателя 17 привода наведения в направлении уменьшения угла рассогласования, Од- новременно сигнал с выхода элемента ИЛИ 24 поступает на вход первого элемента И 27, подготавливая его включение, и на вход элемента НЕ 25, выходной сигнал которого запрещает включение второго элемента И 26, При замыкании замыкающих контактов самоудерживающегося переключателя 6 на вторые входы элементов И 26, 27 поступа - ет сигнал включения системы в работу от источника питания 5, При этом элемент И 26 остается отключенным, а
элемент И 27 формирует на своем выходе сигнал Логическая 1, Выходной сигнал элемента И 27 поступает на вход устройства управления включением привода наведения 23, воздействующего на усилитель 19 и на задатчик скорости 22, В этом случае на вмкоде задатчика скорости 22 появляется ступенчатое управляющее напряжение определенной величины, поступающее на вход блока ограничения 21, Выходное напряжение блока ограничения 21 поступает на второй вход усилителя 19. Оно
плавно увеличивается и соответственно с заданным ускорением увеличивается скорость вращения вала двигателя 17. Выходной сигнал датчика скорости 18 поступает на третий вход усилителя 19 и на вход блока контроля 20. При достижении двигателем 17 заранее выбранного значения скорости на выходе блока контроля 20 формируется напряжение, которое поступает на пер вьй вход элемента ИЛИ 24, выходной сигнал которого при этом не меняется Двигатель 17 продолжает разгоняться и при очень больших сигналах рассогласования выходит на постоянную скорость вращения, величина которой определяется величиной выходного напряжения задатчика скорости 22, После уменьшения угла рассогласования ниже некоторой допустимой величины выходной сигнал индикатора направления недопустимого рассогласования становится равным нулю, Этот сигнал отключает трехпозиционный переключатель задатчика скорости 22 и снимает напряжение с его выхода. При этом на выходе элемента ИЛИ 24 присутствует сигнал Логическая 1, потому что на его первый вход поступает сигнал Логическая 1 с выхода блока конт- 20, Привод наведения 3 продолжает свою работу, Вькодное напряжени блока ограничения 21 плавно уменьшается и соответственно с заданным за-; медлением плавно уменьшается скорост вращения вала двигателя 17, После уменьшения этой скорости ниже величины, при. которой выходное напряжение датчика скорости 18 станет меньше зоны нечувствительности блока контроля 20, выходное напряжение последнего станет равным нулю. На выходе элемента ИЛИ 24 сформируется сигнал Логический О, Этот сигнал выключит элемент И 27, который в свою очередь рыключит устройство управления включением привода наведения 23. На выходе элемента НЕ 25 сформируется сигнал Логическая 1, которьй пройдет на выход элемента И 26 и включит в работу устройство управления включением привода слежения 16. Двигатель 17 привода наведения 3 останавливается , а двигатель 11 привода слеженил 2 начинает свое вращение, осуществля перемещение объекта управления 7 в соответствии с программой слежения, заданной программным устройством 13.
0
5
0
5
0
5
0
5
0
5
При возникновении недопустимЬго угла рассогласования, например в случае изменения программы слежения, на одном из выходов индикатора направления недопустимого рассогласования 14 формируется сигнал, отличньй от нуля. Этот сигнал постзшает на соответствующие входы задатчика скорости 22 и элемента ИЛИ 24. При этом происходит включение элемента НЕ 25 и элемента И 27, отключение элемента И 26, что приводит к отключению привода слежения 2 устройством управления включением привода слежения 16 и к включению привода наведения 3 устройством управления включением привода наведения 23, В дальнейшем описанный цикл согласования положения объекта управления 7 с положением, заданным программой слежения, повторяется,
Если в начале работы системы угол рассогласования между фактическим и заданным положениями объекта управления 7 не превьшгает некоторого заданного значения, то после включения источника питания 5 системы с выхода элемента НЕ 25 на вход элемента И 26 поступает сигнал, подготавливающий его включение, При замыкании замыкающих контактов самоудерживающегося переключателя 6 с выхода источника питания 5 на вторые входы элементов И 26, 27 поступает сигнал включения системы. При этом элемент И 27 остается отключенным, а элемент И 26 включается. Выходной сигнал элемента И 26 поступает на вход устройства управления включением привода слежения 16, Последнее воздействует на усилитель 12 таким образом, что вал двигателя 11 начинает вращаться, перемещая объект управления в соответствии с заданной программой слежения ,
Система, представленная на фиг.2, работает следующим образом.
Электромагнитное реле 28 с обмоткой управления 34 и размыкающими 35 -И замыкающими 36 контактами, электромагнитное реле 29 с обмоткой управления 37 и переключающими контактами 38, 39, электромагнитное реле 30 с обмоткой управления 40 и с переключающими контактами 41, 42, электромагнитное реле 31 с обмоткой уп-- равления 43 и с переключающими контактами 44 и электромагнитное реле 32
с обмоткой управления 45 и переключающими контактами 46 образуют логический блок 4.
Объект управления 7 через редукто 8 и дифференциал 9 связан с приводом наведения 3, а через дифференциал 9 и редуктор 10 - с приводом слежения 2, Двигатель 11 привода слежения 2 соединен с выходом усилителя 12. Вход усилителя 12 соединен с общим выводом переключающих контактов 44, у которых вывод замыкающего контакта соединен с первым выходом программного устройства 13, а вывод размы- кающего контакта соединен с общей шиной 49. Второй выход программного устройства 13 соединен с входом индикатора направления недопустимого рассогласования 14, имеющего два вы- хода, один из которых соединен с пер вым вьгеодом обмотки управления 37 электромагнитного реле 29, а второй с первым выводом обмотки управления 40 электромагнитного реле 30. Вторые выводы обмоток управления 37 и 40 соединены с общей шиной 49, Вход программного устройства 13 соединен с выходом датчика угла 15, установленного на оси объекта управления 7,
Двигатель 17 привода наведения 3 механически связан с датчиком скорости 18, например тахогенератором, и соединен с выходом усилителя 19. Один из входов усилителя 19 соединен с выходом да гчика скорости 18 и с входом блока контроля 20. Выход блока контроля соединен с первым выводо обмотки управления 34 электромагнитного реле 28, второй вывод которой соединен с общей шиной 49. Другой вход усилителя 19 соединен с выходом RS-цепи, содержащей резистор 47 и конденсатор 48, и с выводом размы- кающего контакта переключающих кон- тактов 46, у которых вывод замыкающих контактов соединен со средней точкой источника напряжения постоянного тока, со средней точкой 33, а общий вывод соединен с общей шиной 49, Вход RS-цепи соединен с общим выводом переключающих контактов 39, у которых вывод замыкающего контакта соединен с вьтодом отрицательного потенциала источника напряжения посто- янного тока со средней точкой 33, а вьгаод размыкающего контакта соединен с общим выводом переключающих контактов 42,-у которых вывод замыкающего контакта соединен с вьтодом положительного потенциала источника напряжения постоянного тока со средней точкой 33, а вьтод размыкающего контакта соединен с общей шиной 49.
Обмотки управления 43 и 45 электромагнитных реле 31 и 32 соединены своими первыми выводами с общей шиной 49. Выход источника питания 5 соединен с информационным входом переключателя 6 , выход.которого подключен через последовательно соединенные размыкающие контакты переключающих контактов 38, 41 и 35 ко второму вьюоду обмотки управления 43. Кроме того, выход переключателя 6 соединен с первым выводом замьжающих контактов 36, второй вывод которых, а также выводы замыкающих контактов, входящих в состав переключающих контактов 38 и 41, соединены с вторым выводом обмотки управления 45.
Конструктивные элементы, входящие в состав системы, изображенной на фиг.2, выполняют не одну, а нескольк комбинированных функций. Так, например j электромагнитные реле 28, 29, 30 вьтолняют функции элемента ИЛИ 24 с тремя входами и прямым и инверсным выходами, что позволяет отказаться от использования в системе специального элемента НЕ 25, т.е. указанные реле совмещают функции элементов ИДИ 24 и НЕ 25. Входами элемента ИЛИ 24 являются входные цепи обмоток управления 34, 37, 40 вьше перечисленных реле. Выходной сигнал элемента ИЛИ 24 формируется с помощью параллельно соединенных замыкающих контактов , входящих в состав переключающих контактов 36, 38 и 41, через которые сигнал от источника питания 5 поступает на вход электромагнитного реле 32.. Выходной сигнал элемента НЕ 25 формируется с помощью последовательно соединенных размыкающих контактов, входящих в состав переключающих контактов 38, 4J и 35, через- которые сигнал от источника питания 5 поступает на вход электромагнитног реле 31. Электромагнитное реле 31 вьтолняет функции элемента И 26 и функции устройства управления
включением привода слежения 16. Обмотка управления 43 электромагнитного оеле 31 получает питание, если
замкнуты замыкающие контакты переключателя 6 и если замкнуты размыкающие контакты, входящие в состав переключающих контактов 38, 41 и 35. При указанных условиях данное реле срабатывает и его переключакггцие контакт
44включают привод слежения 2, отключая вход усилителя 2 от общей шины
49 и подключая его к выходу програм- много устройства 13, Электромагнитное реле 32 выполняет функции элемента И 27 с двумя входами и функции устройства управления включением прИ вода наведения 23, Обмотка управлени
45электромагнитного реле 32 получает питание, если замкнуты замыкающие контакты переключателя 6 и если замкнут хотя бы один из параллельно соединенных замыкающих контактов, входящих в состав перечлючающих контактов 36, 38 и 41. При указанных условиях это реле срабатывает и его переключающие контакты 46 включают привод наведения 3, отключая вход усилителя. 19 от общей шины 49, и включают источник напряжения постоянного тока со средней точкой 33, подключая его среднюю точку к общей шине 49, Источник напряжения и замыка- кмдие контакты, входящие в состав пе- реключающих контактов 39,.42 электромагнитных реле 29, 30, функционально образуют задатчик скорости 22 с трехпозиционным переключателем, вхо-т дами которого являются входные цепи обмоток управления 37, 40, а выход задатчика скорости 22 образуют общий вывод переключающих контактов 39 и общая шина 49, RS-цепь, содержащая резистор 47 и конденсатор 48, а также соединенные последовательно с ее входом размыкающие контакты, входящие в состав переключающих контактов 39, 42 электромагнитных реле 29, 30, функционально образуют блок ограничения 21 .
Если положение объекта управления 7 не совпадает с заданным положением и угол рас согласования превьщтает допустимое значение, то после включения источника питания 5 системы с одного из выходов индикатора направления недопустимого рассогласования 14 на обмотку управления одного из электромагнитных реле 29, 30 (для оп ределенности положим, что на обмотку управления 37 электромагнитного ре- ле 29) поступает сигнал, несущий инфор
JQ J5
20 5 д
5
мацию о направлении рассогласования, Зле ктромагнитное реле 29 срабатывает. При этом его переключающие контакты 38 подготавливают включение электромагнитного реле 32 и размыкают цепь включения электромагнитного реле 31, а переключающий контакты 39 отключают вход RS-цепи от общей шины 49 и подключают его к выходу источника напряжения постоянного тока со средней точкой 33, При замыкании замыкающих контактов самоудерживающёгося переключателя 6 от источника питания 5 на обмотку управления 45 электромагнитного, реле 32 поступает напряжение. Электромагнитное реле 32 срабатывает, При этом его переключающие контакты 46 отключают выход RS-цепи и вход усилителя 19 от общей шины 49 и подключают к этой шине среднюю точку источника напряжения постоянного тока со средней точкой 33, В этом случае на выходе указанного источника и на входе RS-цепи появляется скачком управляющее напряжение определенной величины. На выходе RS-цепи напряжение при этом увеличивается плавно и, следовательно , с заданным ускорением плавно увеличивается скорость вращения вала двигателя 17 привода наведения 3. На выходе датчика скорости 18 увеличивается напряжение, поступающее на входы усилителя I9 и блока контроля 20, имеющего зону нечувствительности , При достижении двигателем заранее заданной скорости входной сигнал блока контроля 20 превысит зону нечувствительности и на его выходе сформируется сигнал, отличный от нуля . Этот сигнал поступит на вход электромагнитного реле 28, Оно сработает и его размыкающие контакты 35 дополнительно разомкнут цепь включения электромагнитного реле 31, а замыкающие контакты 36 дополнительно замкнут цепь включения электромагнитного реле 32, Двигатель 17 будет продолжать разгонаться и, если угол рассогласования очень велик, вьйдет на постоянную скоростьвращения, величина которой определяется величиной выходного напряжения источника напряжения постоянного тока со средней точкой 33, После уменьшения угла рассогласования ниже заданного порога
выходной сигнал индикатора направления недохгустимого рассогласования Ц становится равным нулю, Электромагнитное реле 29 отключается. Его переключающие контакты 38 подготавливают цепь включения электромагнитного реле 31, а переключающие контакты 39 отключают вход RS-цепи от выхода источника напряжения постоянного ток со средней точк.ой 33 и подключают ег через переключающие контакты 42 к общей шине-49, Привод наведения 3 остается включенным. Напряжение на выходе RS-цепи плавно уменьшается, поскольку конденсатор 48 разряжается через резистор 47 и отчасти через входное сопротивление усилителя 19. Следовательно, плавно с заданным замедлением уменьшается скорость вращения вала двигателя 17, Как только скорость вращения станет меньше заданного порогового значения, выход- ной сигнал датчика скорости 18 станет меньше зоны нечувствительности блока контроля 20. Выходной сигнал блока контроля 20 станет равным нулю При этом отключится электромагнитное реле 28 и его размыкающие контакты 35 включат цепь питания обмотки управления 43 электромагнитного реле 31, а замыкающие контакты 36 разомкнут цепь питания обмотки управления 45 электромагнитного реле 32, Переключающие контакты 46 электромагнитного реле 32 отключа(от источник напряжения постоянного тока со средней точкой 33 от общей шины 49 и подклю- чают к ней вз{од усилителя 19, отключая тем самым привод наведения 3, Электромагнитное реле 31 включается и своими переключающими контактами 44 отключает вход усилителя 12 от общей шины 49 и подключает его к выходу программного устройства, включая тем самым привод слежения 2, Вал двигателя 17 останавливается, а ва.л двигателя 11 привода слежения начи- нает свое вращение, осуществляя поворот объекта управления в соответствии с заданной программой-слежения При возникновении недопустимых углов рассогласования, например при изменении программы слежения, на одном из выходов индикатора направления недопустимого рассогласования
14 возникает сигнал, отличный от нуля. Этот сигнал поступает на вход
электромагнитного реле 29 (или 30), что приводит к отключению- электромагнитного реле 31 и к выключению пр ивода слежения 2, а также к включению электромагнитного реле 32 и к включе7 нию привода наведения 3, В дальнейшем повторяе тся описанный цикл, согласования текущего положения объекта управления с заданным.
Если в начале работы системы угол рассогласования между фактическим и заданным положением объекта управления 7 не превьщгает допустимого значения , то после включения источника питания 5 системы и замыкания замыкающих контактов переключателя 6 элементы системы получают питание через переключающие контакты 38, 41 и 35, При этом срабатьшает электромагнитное реле 31, которое включает в работу привод слежения 2,
Преимуществом данной системы является ограничение динамических нагрузок силовых механизмов на уровне их оптимальных значений, что уменьшает износ силовых механизмов системы и позволяет осуществлять их эксплуатацию длительное время без ухудшения точности системы. Это в свою очередь повышает надёжность системы в целом, Кроме того, в предлагаемой системе осуществлена автоматизация переключения с режима слежения на режим наведения и наоборот, что повьшает быстродействие системы за счет уменьшения времени переключения, При этом уменьшается .утомляемость оператора, осуществляющего надзор за работой системы, а в ряде случаев возможна работа данной системы без специального оператора,
Формула изобретения
1, Двухканальная следящая система содержащая задатчик скорости, иловой механизм, кинематически соединенный входами с вькодами соответственно привода наведения и привода слежения, а выходом - с входом объекта управления и входом привода слежения , и последовательно соединенные источник питания и переключатель, отличающаяся тем, что, с целью повьшгения надежности системы в ней дополнительно установлены устройство управления включением привод наведения, устройство управления включением привода слежения, блок ограничения, блок контроля и логически
блок., соединенный первым входом с выходом переключателя, вторым входом - с выходом блока контроля, третьим и четвертым входами с первым и вторым электрическими выходами привода слежения и с первым и вторым входами задатчика скорости, первым выходом через устройство управления включением привода слежения - с электрическим входом привода слежения, а вторым входом - с входом устройства управления включением привода наведения, подключенного первым выходом к третьему входу задатчика скорости, а вторым выходом - к первому входу привода наведения, соединенного вторым входом через блок ограничения с выходом задатчика скорости, а электрическим выходом - с входом блока контроля.
2. Система поп.1,отличаю- щ а я с я тем, что логический блок содержит элемент ИЛИ, соединенный
выходом с nepBbiM входом первого элемента И, а через элемент НЕ - с первым входом второго элемента И, под- 5 ключенного вторым входом к второму входу первого элемента И, причем второй вход второго элемента И, первый, второй и третий входы элемента ИЛИ, выходы второго и первого элемен 10 тов И являются соответственно первым вторым, третьим и четвертым входами и первым и вторым выходами логического блока.
3.Система по п.1, о т л и ч а ю- 15 Щ а я с я тем, что блок ограничения
содержит интегратор, вход и выход которого являются входом и выходом блока ограничения.
4.Система по п.1, о тлич аю- 20 Щ а я с я тем, что блок контроля содержит усилитель с зоной нечувствительности, вход и выход которого являются входом и выходом блока контроля .
(Риг./
7
Редактор М, Бандура
Составитель Ю. Гладков
Техред О.Сопке Корректор в, Бутяга
Заказ 3485/41Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий, 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fpL/s.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор давления для насосной станции магистрального трубопровода | 1979 |
|
SU773585A1 |
| Фотокопировальное устройство для управления станком | 1978 |
|
SU750436A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Устройство для определения деформаций горных пород | 1983 |
|
SU1209856A1 |
| Устройство для управления уровнем металла в кристаллизаторе установки непрерывной разливки стали | 1982 |
|
SU1052317A1 |
| Программный регулятор температуры | 1978 |
|
SU809106A1 |
| Следящая система | 1989 |
|
SU1672412A1 |
| Двухканальная следящая система | 1974 |
|
SU487375A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| М.: Наука, 1977, с.45-49 | |||
| Новая техника в астрономии | |||
| Материалы совещания Комиссии приборостроения при Астрономическом совете Акд- демии наук СССР, вьш | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Л.: Еаука, 1970, C.I16-126. | |||
