Изобретение относится к области судовождения, в частности управлению движением морских судов и кораблей.
Известна система стабилизации судна (А.С. СССР Nt 1529182), содержащая датчики положения судна, измерители угловой скорости, исполнительный механизм. Система достаточно хорошо стабилизирует положение судна в пространстве при слабых возмущениях и линейном регуляторе. Использование такой системы с релейным включением исполнительного привода не позволяет получить желаемую точность стабилизации. Установка же системы на неустойчивое по направлению движения судно приводит к раскачке последнего практически при любых параметрах регулятора.
Известна также система стабилизации судна (патент России N 2111891), принятая нами в качестве прототипа, состоящая из двух продсистем, работающих одновременно - программно управляющей частью исполнительных средств и независимо работающей с использованием замкнутой системы, устраняющей отклонение корабля от заданного направления движения путем воздействия на вторую часть исполнительных средств. Система содержит датчик угла дифферента, датчик рассогласования по глубине, выходы которых соединены с входом усилителя, выход последнего соединен с исполнительным устройством - рулевым приводом. Система также содержит дополнительные компенсирующие органы и блок логики.
Система позволяет стабилизировать судно в пространстве даже при сильных внешних возмущениях, величина которых заранее достоверно известна, момент времени воздействия возмущения также известен.
Недостатком этой системы является:
- невозможность использования максимальной эффективности исполнительных органов, т.к. замкнутая система при увеличении коэффициента передачи теряет устойчивость,
- низкая точность при "плохом" объекте управления (неустойчивом на заданном направлении судне),
- система теряет устойчивость при использовании релейного рулевого привода,
- невозможность стабилизации судна при сильных внешних возмущениях, величина и момент времени воздействия которых заранее неизвестен.
Техническим результатом изобретения является стабилизация широкого класса судов (в том числе и неустойчивых на заданном направлении движения, и при релейном приводе) при сильных внешних возмущениях, величина которых и время действия заранее неизвестна.
Это достигается тем, что в систему, содержащую датчик рассогласования по глубине, датчик угловой скорости, датчик угла дифферента и датчик угла перекладки руля, выходы которых подключены к входам усилителя, а выход последнего - к рулевому приводу, блок логики и два компенсирующих органа, введен задатчик уставок, блок логики выполнен в виде двух идентичных субблоков с запараллеленными входами, являющимися соответствующими входами блока логики, причем выход датчика скорости и выход датчика угла дифферента подключены соответственно к первому и второму входам блока логики, первый положительный выход задатчика уставок, первый отрицательный выход задатчика уставок, второй отрицательный выход задатчика уставок и второй положительный выход задатчика уставок подключены соответственно к третьему, четвертому, пятому и шестому входу блока логики, выходы которого, являющиеся каждый выходом соответствующего субблока, подключены к входу соответствующего компенсирующего органа, при этом каждый субблок блока логики содержит четыре поляризованных реле и два электромагнитных реле, первые обмотки управления первого и второго поляризованных реле подключены к первому входу субблока, первые обмотки управления третьего и четвертого поляризованного реле подключены к второму входу субблока, вторая обмотка управления второго поляризованного реле, вторая обмотка управления первого поляризованного реле, вторая обмотка управления третьего поляризованного реле и вторая обмотка управления четвертого поляризованного реле подключены соответственно к третьему, четвертому, пятому и шестому входу субблока, первая и вторая обмотки управления первого электромагнитного реле через замыкающие контакты соответственно первого и третьего поляризованного реле соединены с положительной шиной питания, первая и вторая обмотки управления второго электромагнитного реле через замыкающие контакты соответственно второго и четвертого поляризованного реле соединены с отрицательной шиной питания, замыкающие контакты первого и второго электромагнитных реле соединяют соответственно положительную и отрицательную шину питания с выходом субблока.
Таким образом, сущность изобретения состоит в том, что заявляемая система стабилизации судна в дополнение к обычному "ПД"- регулятору снабжена контуром нелинейной коррекции в функции от величины отклонения судна по угловой скорости и углу дифферента.
Изобретение поясняется чертежами, на которых на фиг. 1 представлена функциональная схема системы стабилизации судна, а на фиг. 2 - принципиальная схема блока логики.
Система стабилизации судна содержит (см. фиг. 1) датчик рассогласования по глубине 1, датчик угловой скорости 2, датчик угла дифферента 3, датчик угла перекладки руля 4, усилитель 5, рулевой привод 6, блок логики 7, состоящий из двух идентичных субблоков 7.1, 7.2, к запараллеленным входам которых подключены соответствующие выходы задатчика уставок 8, а их выходы соединены с входами компенсирующих органов 9, 10. Цифрой 11 обозначено судно. Блок логики 7 содержит два субблока 7.1, 7.2, каждый из которых содержит четыре поляризованных реле 12 - 15 и два электромагнитных реле 16, 17. Первые обмотки управления поляризованных реле 12, 13 подключены к первому входу субблока, первые обмотки поляризованных реле 14, 15 подключены к второму входу субблока, вторые обмотки управления поляризованных реле 13, 12, 14 и 15 подключены соответственно к третьему, четвертому, пятому и шестому входам субблока. Первая и вторая обмотки управления электромагнитного реле 16 через замыкающие контакты соответственно поляризованного реле 12 и 14 соединены с положительной шиной питания, а первая и вторая обмотки управления электромагнитного реле 17 через замыкающие контакты соответственно поляризованного реле 13 и 15 соединены с отрицательной шиной питания. Замыкающие контакты электромагнитных реле 16 и 17 соединяют соответственно положительную и отрицательную шину питания с выходом субблока.
В качестве датчиков углов и угловых скоростей могут использоваться серийно выпускаемые датчики с точностью не ниже 5%. Датчик рассогласования по глубине 1 реализуется из задатчика глубины и датчика текущей глубины с сумматором. Компенсирующие органы 9, 10 обычно реализуют в виде прочных цистерн, которые либо заполняют водой, либо продувают воздухом высокого давления. Усилитель 5 может быть реализован на микросхемах типа 140 УД-6. Поляризованные реле 12-15 и элекромагнитные реле 16, 17 должны иметь не менее двух обмоток и нормально разомкнутую контактную пару.
Система стабилизации движения судна работает следующим образом. Движение судна под водой при отсутствии существенных внешних возмущений (в случае устойчивого на курсе судне и линейного рулевого привода) с типовым "ПД" регулятором обеспечивается с приемлемым качеством стабилизации судна. Однако при появлении внешних возмущений, величина которых и время появления заранее не известен, система стабилизации по патенту N 2111891 оказывается неработоспособной. Увеличение же коэффициента передачи в "ПД" регуляторе также недопустимо из-за потери устойчивости замкнутой системы. Введение же модернизированного блока логики эффективно решает проблему достижения требуемой точности стабилизации даже при релейной работе рулевого привода.
В обычных условиях эксплуатации стабилизация заданной глубины погружения и угла дифферента обеспечивается работой типового " ПД" регулятора; появление сигнала рассогласования приводит к появлению отклонения руля и к возвращению судна к заданной величине глубины погружения судна. При этом т.к. сигнал рассогласования по углу дифферента и угловой скорости не превысил допустимой величины, подключение компенсирующих органов 9, 10 не происходит. При существенно больших возмущениях судно выходит из заданного коридора по углу дифферента, что приводит к включению блока логики и подключению дополнительного управляющего воздействия.
Рассмотрим работу блока логики 7 (см. фиг. 2).
При выходе судна из допустимого коридора отклонений судна по углу дифферента и угловой скорости подключается первый компенсирующий орган 9. В случае увеличения возмущающего воздействия возможно увеличение отклонения судна по углу дифферента и угловой скорости в этом случае происходит подключение еще и второго компенсирующего органа 10.
Условие включения (выключения) первого компенсирующего органа 9:
если + ψ > C1 и +  > C2, то F1 = F > 0, (1а)
> C2, то F1 = F > 0, (1а)
если - ψ < -C1 и -  < C2, то F1 = F < 0, (1б)
< C2, то F1 = F < 0, (1б)
если  < C1 или
< C1 или  < C2, то F1 = 0, (1в)
< C2, то F1 = 0, (1в)
где  - угловая скорость, ψ - угол дифферента,
- угловая скорость, ψ - угол дифферента,
F1 - управляющее воздействие блока 9 на судно.
Условие подключения (отключения) второго исполнительного органа 10:
если K1 ψ > C1 и K2 > C2, то F2 = F > 0, (2а)
> C2, то F2 = F > 0, (2а)
если -K1ψ < -C1 и -K2 < -C2, то F2 = F < 0, (2б),
< -C2, то F2 = F < 0, (2б),
если  < C1 или
< C1 или  < C2, то F2 = 0, (2в)
< C2, то F2 = 0, (2в)
где F2 - выходное управляющее воздействие блока 10 на судно и 0 < K1 < 1, 0 < K2 < 1.
а) При выполнении условия (1а) подключается первый компенсирующий орган 9 с положительным воздействием на судно (уменьшение угла дифферента).
Срабатывает первое и третье поляризованные реле, т.к. при выполнении условия (1a) напряжение Uψ > U1зад и > U2зад,
> U2зад,
где + Uψ - напряжение, пропорциональное текущему углу дифферента,
+  - напряжение, пропорциональное текущей угловой скорости,
- напряжение, пропорциональное текущей угловой скорости,
- U1зад, U2зад - напряжения противоположного знака, напряжениям Uψ,  , поступающим с задатчика уставок 8 (устанавливаемые судоводителем при формировании условия (1а)).
, поступающим с задатчика уставок 8 (устанавливаемые судоводителем при формировании условия (1а)).
При этом замыкаются контактные группы первого и третьего поляризованнных реле и напряжение одного знака поступает на две обмотки первого электромагнитного реле 16. При этом суммарный магнитный поток оказывается достаточным, чтоб сработала контактная группа реле 16, что приведет к появлению положительного воздействия компенсирующего органа 9 на судно. Это заставит судно вернуться в допустимый коридор по углу дифферента.
б) Выполняется условие (1б), судно набрало недопустимо большой отрицательный дифферент и отрицательную угловую скорость
ψ < 0 и  < 0, Uψ < U1зад,
< 0, Uψ < U1зад,  < U2зад.
< U2зад.
в) Когда условие (1а) или (1б) перестает выполняться, одно из поляризованных реле обесточится, а следовательно, первый компенсирующий орган отключится и не будет оказывать какого-либо воздействия на судно, что соответствует условию (1в).
Сработает второе и четвертое поляризованные реле 14, 15, что приведет к срабатыванию второго электромагнитного реле 17 и подключению первого компенсирующего органа 7, НО ! с противоположным знаком управляющего воздействия (-) по сравнению со случаем (1a).
При выполнении условий (2) работает второй субблок 7.2 блока логики 7 и происходит подключение (отключение) второго компенсирующего органа 10 аналогично описанному в п. 1а), п.1 б) и п. 1в). Коэффициент K1 при угле дифферента и коэффициент K2 при угловой скорости в зависимости (2) положительны, но меньше единицы. Это будет приводить к тому, что выполнение условия (2 а, б) будет происходить при больших отклонениях судна по углу дифферента и угловой скорости, чем при условиях (1), т.е. при больших внешних возмущениях.
Проведенное моделирование предложенной системы стабилизации, с модифицированным блоком логики, с неустойчивым на курсе морским судном и релейным включением компенсирующих органов, подтвердило высокую эффективность двойной логической коррекции закона стабилитации как с точки зрения точности стабилизации, так и обеспечения большого запаса устойчивости замкнутой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 1996 |
|
RU2111891C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СУДНОМ С ДИАГНОСТИКОЙ | 2004 |
|
RU2267440C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2312789C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2301174C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2238881C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2306239C1 |

Изобретение относится к судостроению, в частности к системам управления движением судов. Система стабилизации судна содержит датчик рассогласования по глубине, датчик угловой скорости, датчик угла дифферента, датчик угла перекладки руля, выходы которых подключены к входам усилителя. Выход усилителя подключен к входу рулевого привода. Кроме того, система содержит блок логики, два компенсирующих органа и задатчик уставок. Блок логики состоит из двух идентичных субблоков, к запараллеленным входам которых подключены соответствующие выходы задатчика, уставок, а их выходы соединены с входами компенсирующих органов. Каждый субблок блока логики содержит четыре поляризованных реле и два электромагнитных реле. Достигается стабилизация широкого класса судов при сильных внешних возмущениях, величина которых и время действия заранее неизвестны. 2 ил.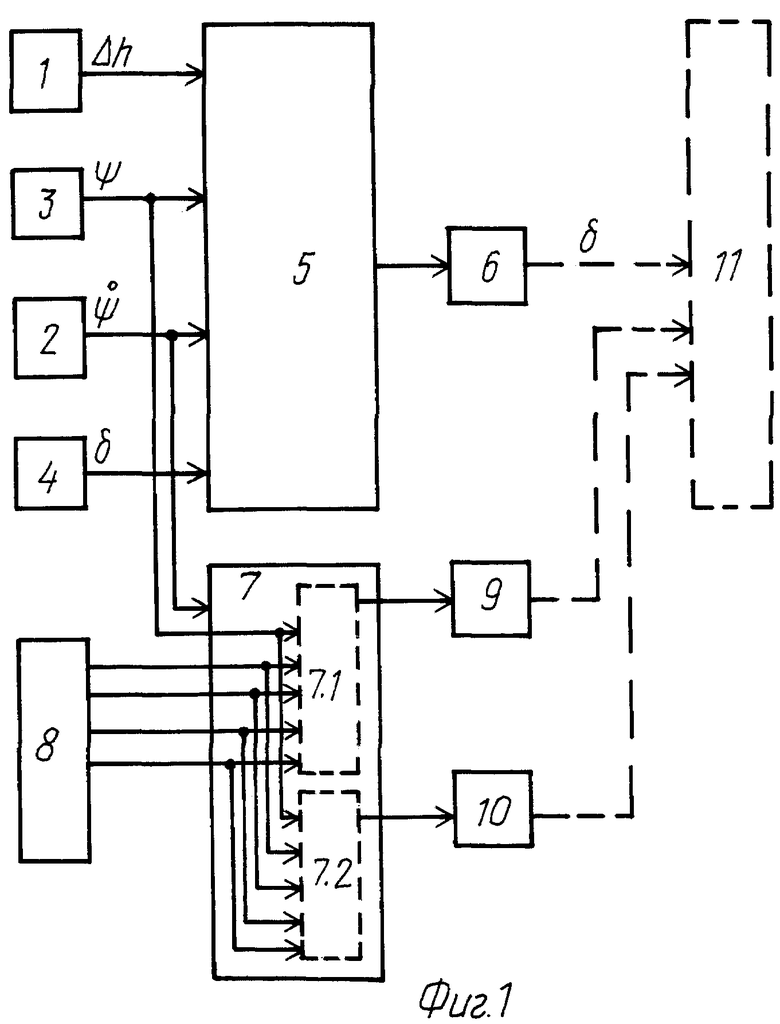
Система стабилизации судна, содержащая датчик рассогласования по глубине, датчик угловой скорости, датчик угла дифферента и датчик угла перекладки руля, выходы которых подключены к входам усилителя, выход которого подключен к входу рулевого привода, блок логики и два компенсирующих органа, отличающаяся тем, что в нее введен задатчик уставок, блок логики выполнен в виде двух идентичных субблоков с запараллеленными входами, являющимися соответствующими входами блока логики, причем выход датчика угловой скорости подключен к первому входу блока логики, выход датчика угла дифферента подключен к второму входу блока логики, первый положительный выход задатчика уставок, первый отрицательный выход задатчика уставок, второй отрицательный выход задатчика уставок и второй положительный выход задатчика уставок подключены соответственно к третьему, четвертому, пятому и шестому входам блока логики, выходы которого, являющиеся каждый выходом соответствующего субблока, подключены к входу соответствующего компенсирующего органа, при этом каждый субблок блока логики содержит четыре поляризованных реле и два электромагнитных реле, первые обмотки управления первого и второго поляризованных реле подключены к первому входу субблока, первые обмотки управления третьего и четвертого поляризованных реле подключены к второму входу субблока, вторая обмотка управления второго поляризованного реле, вторая обмотка управления первого поляризованного реле, вторая обмотка управления третьего поляризованного реле и вторая обмотка управления четвертого поляризованного реле подключены соответственно к третьему, четвертому, пятому и шестому входам субблока, первая и вторая обмотки управления первого электромагнитного реле через замыкающие контакты соответственно первого и третьего поляризованных реле соединены с положительной шиной питания, первая и вторая обмотки управления второго электромагнитного реле через замыкающие контакты соответственно второго и четвертого поляризованных реле соединены с отрицательной шиной питания, замыкающие контакты первого и второго электромагнитных реле соединяют соответственно положительную и отрицательную шины питания с выходом субблока.
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 1996 |
|
RU2111891C1 |
| Система динамического позиционирования судном | 1989 |
|
SU1615678A1 |
| US 4388889 A, 21.06.1983 | |||
| Устройство для борьбы с пылью | 1985 |
|
SU1263878A2 |
