1
Изобретение относится к телемеханике и может быть использовано для передачи сигналов телерегулирования рассредоточенным объектам.
Цель изобретения - повьшение точности и быстродействия регулирования.
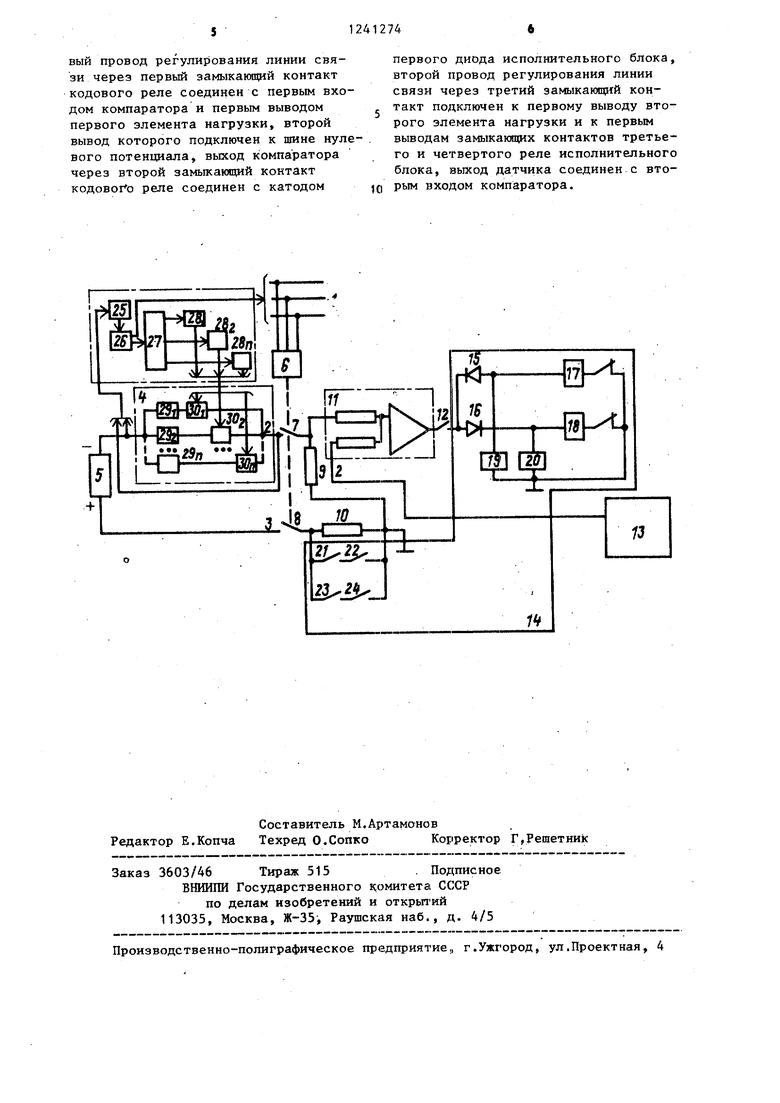
На чертеже изображена функциональная схема устройства.
Устройство содержит кодовые провода 1 линии связи, провода 2 и 3 регулирования линии связи, управляемый .. стабилизатор 4 тока, блок 5 питания, кодовое реле 6, замыкающие контакты 7 и 8 кодового реле 6, элементы 9 и 10 нагрузки, компаратор 11, замыкающий контакт 12 кодового реле 6, датчик 13, исполнительный блок 14, состоящий из диодов 15 и 16., реле 17-20 и замыкающий контакт 21 реле 19, замыкающий контакт 22 реле 18, замыкаюпщй контакт 23 реле 20, замыкающий контакт 24 реле 17, генератор 25 импульсов, , формирователь 26 .кода, преобразова1241274
уровня, который через задатчик 28( сигнала телерегулирования (соответствующий первому объекту телерегулирования) поступае т на управляемый ста- 5 билизатор 4 тока и открывает те его ключи 30, ,. . . ,30 f,, которые соответст10
15
20
вуют состоянию задатчика 281, а следовательно, и заданному.уровню сигнала телерегулирования. Задатчики 28j,.,,.,28f| сигнала телерегулирования представляют собой, например, обычные переключатели, которые определяют, какой из ключей 30/,...,30fi управляемого стабилизатора 4 тока откроется при поступлении сигнала единичного уровня на шину выхода преобразователя 27 кодов, с которым соединен этот переключатель. Положение задатчика предварительно устанавливается оператором и в процессе работы
устройства может им изменяться. В результате через элементы 9 и 10 нагрузки начинает протекать стабилизированный ток установленной величины от блока 5 питания. Падение напряжения на элементе 9, определяющее регулирующее воздействие на объект регу- Х1ирования, поступает на первый вход компаратора 11. На его второй вход поступает напряжение с вькода датчи- ка 13, которое пропорционально регулируемому параметру, например углу поворота двигателя. В зависимости от знака разности этих напряжений через диод 15 или 16 включаются реле 19 и 17 или реле 20 и 18 (будем . считать, что включились реле 19 и 17), двигате, начинает врап1аться в соответствующую сторону. При этом сигнал напряжения с выхода датчика 13 изменяется в сторону уменьшения разности входных напряжений компаратора 11. Как только исполнительный блок 14 отработает заданное воздействие, выходное напряжение датчика 13 сравняется, а затем превысит падение напряжения на элементе 9 (задающее напряженке), знак выходного напряжения компаратора 11 изменится, в результате чего ранее включенное реле 19 опустит якорь, а реле 20 вклю чится, так как реле 17 имеет за,цержку на отпускание, оно еще останется на некоторое время во включенном состоянш-1. При этом контакт 23 реле 20 и контакт 24 реле 17 окажутся за)мкнутыми одновременно, в результате чего элемент 10 нагрузки будет
28,
.,28
тока
9Q . jii в
тель 27 кода, , задатчики ., сигналов телерегулирования.
Управляемый стабилизатор 4 содержит стабилизаторы 29,,.. тока и ключи 30,,...530п.
Устройство работает следующим образом.
Формирователь 26 кода выдает на кодовые провода 1 линии связи двоичный код адреса объекта регулирования. Одновременно с помощью преобразователя 27 кода и задатчиков 28,, ... ,28 j устанавливается необходимая величина тока стабилизации управляемого стабилизатора 4 тока. При включении устройства генератор 25 импульсов, в качестве которого может быть использован, например, мультивибратор в ждущем режиме, генерирует импульс, по- ступакяций на формирователь 26 кодов, представляющий собой обычный двоичный счетчик, выходной сигнал которого соответствует единице, записанной в двоичном коде. Этот двоичный сигнал поступает на кодовые провода 1 линии связи и вызьшает включение соответствующего кодового реле 6, которое своими контактами 7 и 8 подключает элементы 9 и 10 нагрузки к проводам 2 и 3 регулирования линии связи. Одновременно этот сигнал поступает на преобразователь 27 кодов (диодную матрицу), преобразуннций двоичный код в десятичный. При йтом на его первом выходе появляется сигнал единичного
5
0
5
0
5
0
0
3
вуют состоянию задатчика 281, а следовательно, и заданному.уровню сигнала телерегулирования. Задатчики 28j,.,,.,28f| сигнала телерегулирования представляют собой, например, обычные переключатели, которые определяют, какой из ключей 30/,...,30fi управляемого стабилизатора 4 тока откроется при поступлении сигнала единичного уровня на шину выхода преобразователя 27 кодов, с которым соединен этот переключатель. Положение задатчика предварительно устанавливается оператором и в процессе работы
устройства может им изменяться. В результате через элементы 9 и 10 нагрузки начинает протекать стабилизированный ток установленной величины от блока 5 питания. Падение напряжения на элементе 9, определяющее регулирующее воздействие на объект регу- Х1ирования, поступает на первый вход компаратора 11. На его второй вход поступает напряжение с вькода датчи- ка 13, которое пропорционально регулируемому параметру, например углу поворота двигателя. В зависимости от знака разности этих напряжений через диод 15 или 16 включаются реле 19 и 17 или реле 20 и 18 (будем . считать, что включились реле 19 и 17), двигате, начинает врап1аться в соответствующую сторону. При этом сигнал напряжения с выхода датчика 13 изменяется в сторону уменьшения разности входных напряжений компаратора 11. Как только исполнительный блок 14 отработает заданное воздействие, выходное напряжение датчика 13 сравняется, а затем превысит падение напряжения на элементе 9 (задающее напряженке), знак выходного напряжения компаратора 11 изменится, в результате чего ранее включенное реле 19 опустит якорь, а реле 20 вклю чится, так как реле 17 имеет за,цержку на отпускание, оно еще останется на некоторое время во включенном состоянш-1. При этом контакт 23 реле 20 и контакт 24 реле 17 окажутся за)мкнутыми одновременно, в результате чего элемент 10 нагрузки будет
3
зашунтирован цепочкой, этих контактов и имевшееся на нем падение напряжени скачкообразно окажется приложенным к стабилизатору 4 тока.
Возникновение этого скачка напря- женин, поступающего на первый вход генератора 25 импульсов, является сигналом того, что заданное регулирующее Воздействие отработано соответствующим исполнительным блоком. При этом на выходе генератора 25 импульсов появляется второй импульс. На кодовых проводах 1 линии связи формируется двоичный код второго объекта телерегулирования, а управ- ляемый стабилизатор 4 тока задает в провода 2 регулирования линии связи значения тока, соответствующие .заданию для второго объекта телёрегу лирования. Кодовое реле 6 отпускает и размыкает свои контакты 7,8 и 12. Исполнительный блок 14 отключается. Подавая новый код на кодовые провода 1 линии связи, передающая сторона осуществляет аналогичным образом пе- редачу сигнала следукяцему объекту телерегулирования.
Таким образом, в предлагаемом устройстве осуществляется информационна обратная связь. Передача сигнала телерегулирования очередному объекту происходит лишь после получения сигнала подтверждения отработки передаваемого сигнала от предьщущего объекта. Это снижает ошибки телерегулирования. При этом осуществление обратной связи достигается без использования дополнительной линии связи.
Кроме того, в предлагаемом устройстве обеспечивается максимальное быстродействие системы. Это связано с тем, что время отработки передавае- ,мых сигналов телерегулирования раз- ное. При выборе частоты сканирования объектов в устройстве-прототипе исходят, из максимального времени отработки. Поэтому в тех случаях, когда время отработки сигнала меньше макси- мального, возникает неиспользуемая пауза во времени. В предлагаемом устройстве эти паузы времени исключены, т.е. передача сигнала очередному объекту происходит сразу же по сле окон- чания отработки предьщущего сигнала, в результате чего достигается максимальное быстродействие.
12744
Формула изобретения
Устройство телемеханики, содержащее на передающей стороне генератор импульсов, выход которого соединен с входом формирователя кода, первые выходы которого подключены к кодовым проводам линии связи, блок питания, на каждом контролируемом пункте кодовое реле, к входам которого подключены кодовые провода линии связи, датчик и исполнительный блок, содержащий первый и второй диоды, катоды и аноды которых соответственно объединены, Анод первого диода и катод второго диода подключены к первым выводам обмоток соответственно первого и второго реле, отличающее с я тем, что, с целью повьш1ения точности и быстродействия регулирования в него на передающей .стороне введены преобразователь кода, задатчики сигнала телерегулирования, управляемый стабилизатор тока, первый вывод блока питания соединен с первыми входами генератора импульсов и yпpaвJlяeмo го стабилизатора тока, выход которого подключен к первому проводу регулирования линии связи и к второму входу генератора импульсов, второй вывод блока питания соединен с вторым проводом регулирования линии связи, второй выход формирователя кода подключен к входу преобразователя кода, выходы которого соединены через соответствующие задатчики сигнала телерегулирования с вторыми входами
управляемого стабилизатора тока, на каждом контролируемом пункте введены компаратор, первьш и второй элементы нагрузки, в исполнительный блок введены третье и четвертое ре- .ле, первые выводы обмоток которых подключены к первым выводам соответственно первого и второго реле, вторые вьтоды которых через размы- какшще контакты соответственно второго и первого реле соединены с шиной нулевого потенциала, к которой подключены вторые выводы обмоток третьего и четвертого реле, последовательно соединенные замыкающие контакты первого и четвертого реле подключены параллельно к последовательно соединенным замыкаюпщм контактам второго и третьего реле, первые выводы замыкающих контактов первого и второго рел исполнительного блока соединены с шиной нулевого потенциала, первый провод регулирования линии связи через первый замыкающий контакт кодового реле соединен с первым входом компаратора и первым выводом первого элемента нагрузки, второй вывод которого подключен к шине нулевого потенциала, выход компаратора через второй замыкающий контакт кодового реле соединен с катодом
первого диода исполнительного блока, второй провод регулирования линии связи через третий замыкающий контакт подключен к первому выводу второго элемента нагрузки и к первым выводам замыкающих контактов третьего и четвертого реле исполнительного блока, выход датчика соединен с вторым входом компаратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи информации | 1990 |
|
SU1815668A1 |
| Устройство для автоматизированного контроля параметров реле | 1985 |
|
SU1265704A1 |
| Устройство для передачи информации | 1985 |
|
SU1332352A1 |
| Устройство телемеханики | 1984 |
|
SU1304050A1 |
| УСТРОЙСТВО ВКЛЮЧЕНИЯ И ОТКЛЮЧЕНИЯ ПИТАНИЯ | 2005 |
|
RU2300166C1 |
| Многоканальный регулятор | 1982 |
|
SU1100606A1 |
| Система регулирования диаметра жил на бумагомассной машине | 1986 |
|
SU1472879A1 |
| Электронно-управляемое кодовое устройство | 1990 |
|
SU1796005A3 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МОТОРНЫМИ ПРИВОДАМИ РАЗЪЕДИНИТЕЛЕЙ КОНТАКТНОЙ СЕТИ | 2004 |
|
RU2274904C2 |
| УСТРОЙСТВО ПРИЕМА КОМАНД УПРАВЛЕНИЯ | 2002 |
|
RU2237287C2 |
Изобретение относится к области телемеханики и может быть использовано для телерегулирования рассредоточенными объектами по проводам линии связи. Цель изобретения - повьш1ение точности и быстродействия регулирования. С этой целью на передающей стороне при включении устройства формируется двоичный код адреса выбираемого объекта и формируется регулирующее воздействие в виде значения тока, подаваемого в провод регулирования. На приемной стороне включается кодовое реле выбранного объекта и подключает своими контактами приемную сторону к проводам регулирования. После отработки регулирующего воздействия на приемной стороне формируется сигнал обратной связи (ОС), который передается по проводам регулирования и принимается на передающей стороне. После получения сигнала ОС передающая сторона формирует код адреса следующего объекта, при этом кодовое реле ранее выбранного объекта отключает этот объект от проводов регулирования. Введение ОС позволяет повысить точность и быстродействие регулирования. 1 ил. с € (Л to 4
| Абакумов В.Г | |||
| Электронные про- мьшшенные устройства | |||
| Киев: Вища школа, 1978, с | |||
| Стеклографический печатный станок с ножной педалью | 1922 |
|
SU236A1 |
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Иванченко Г.Е | |||
| Основы построения и расчеты единой телемеханической системы угольной шахты | |||
| М.: Недра, 1976, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
