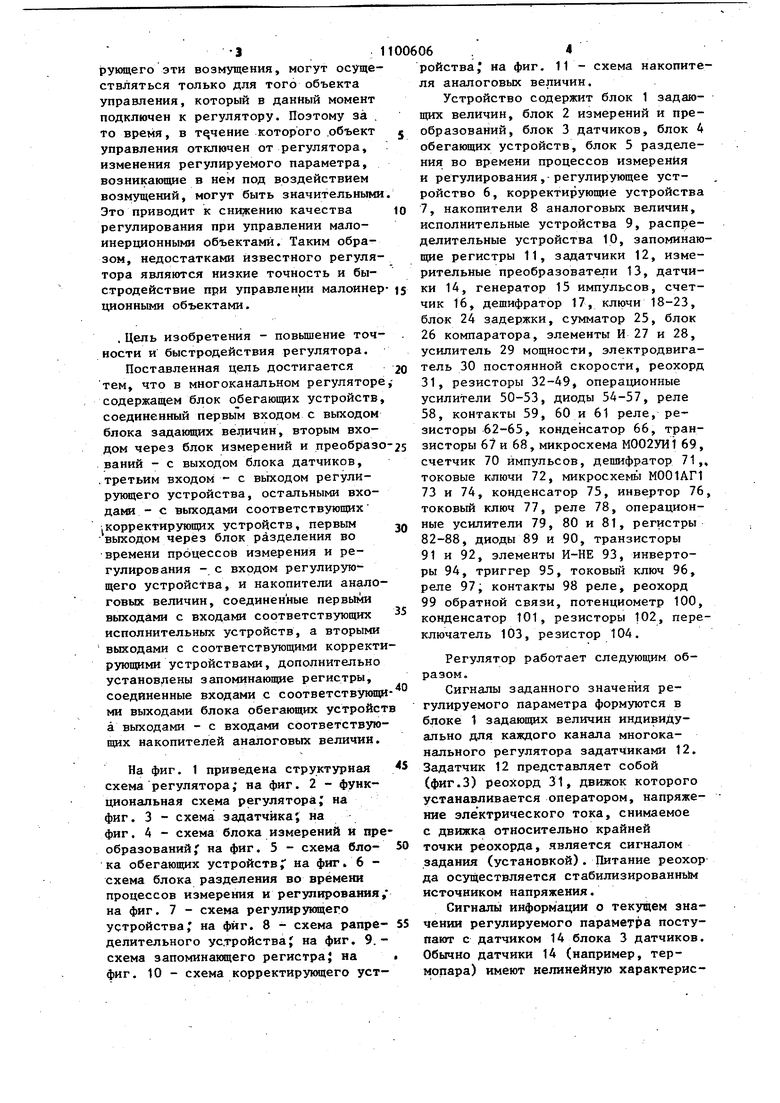
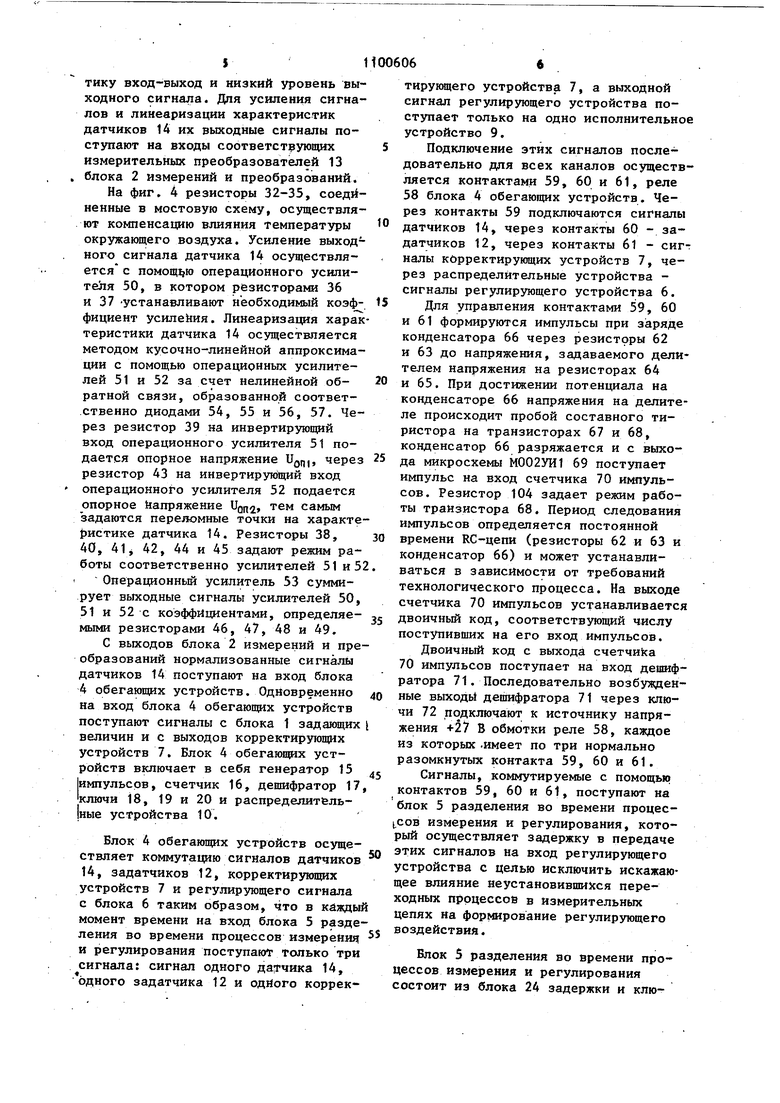
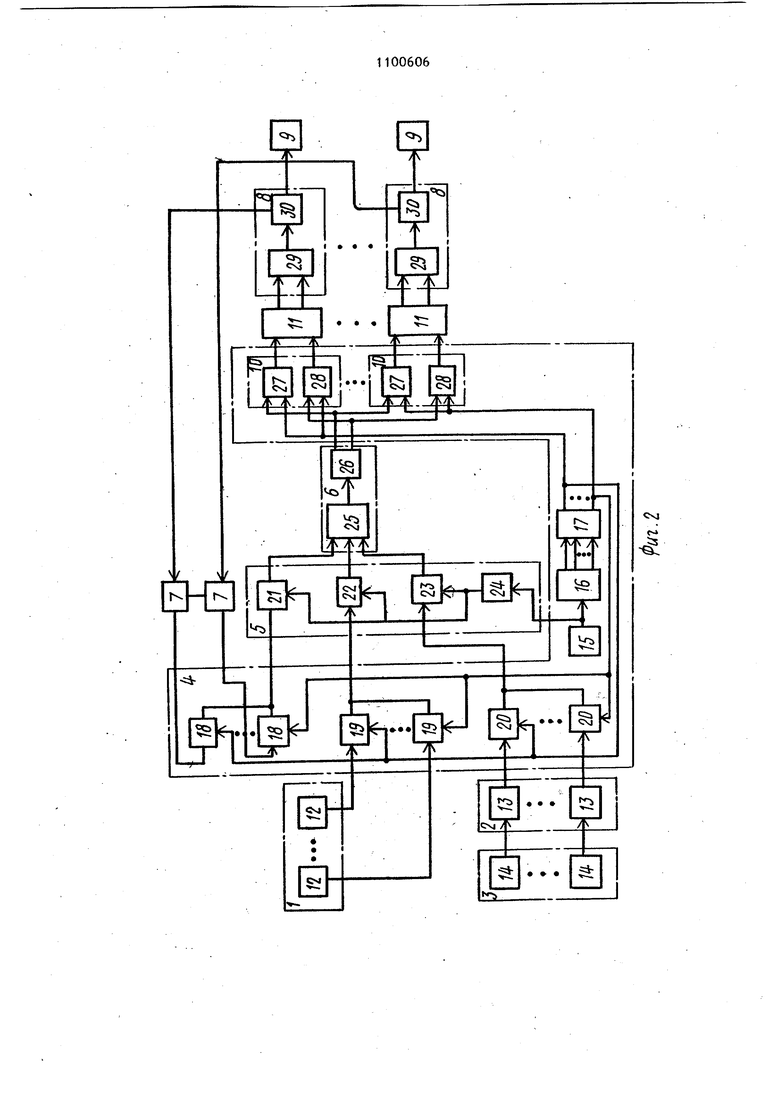
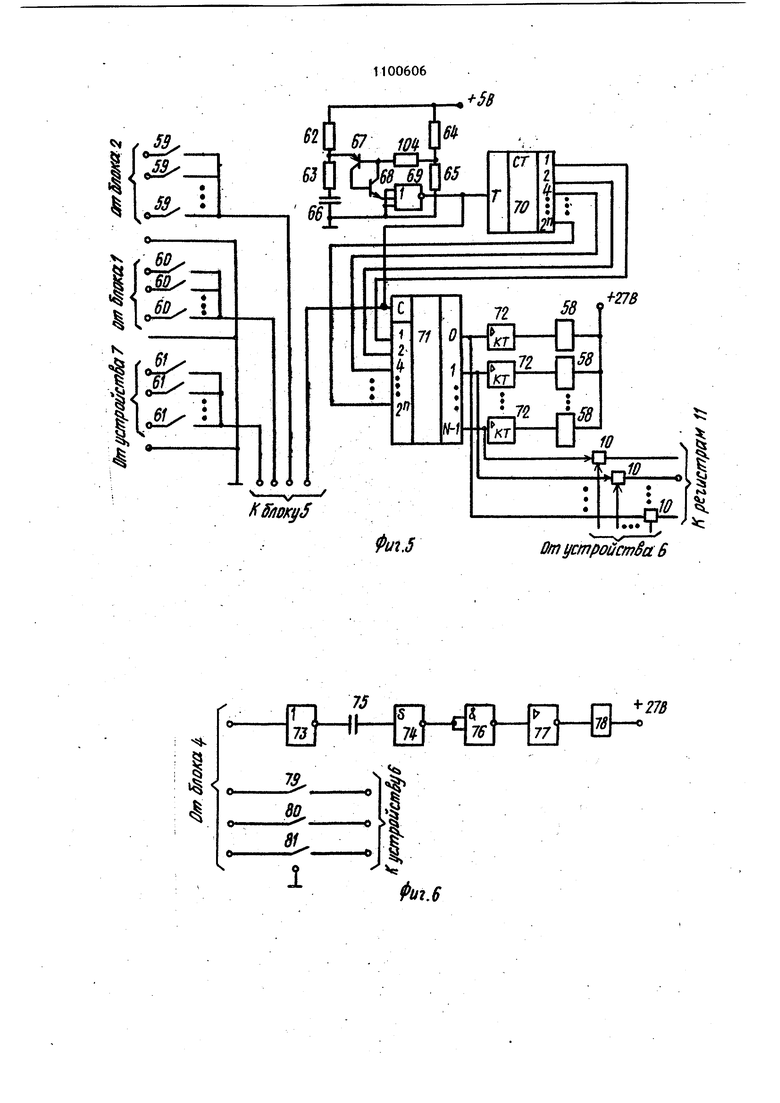
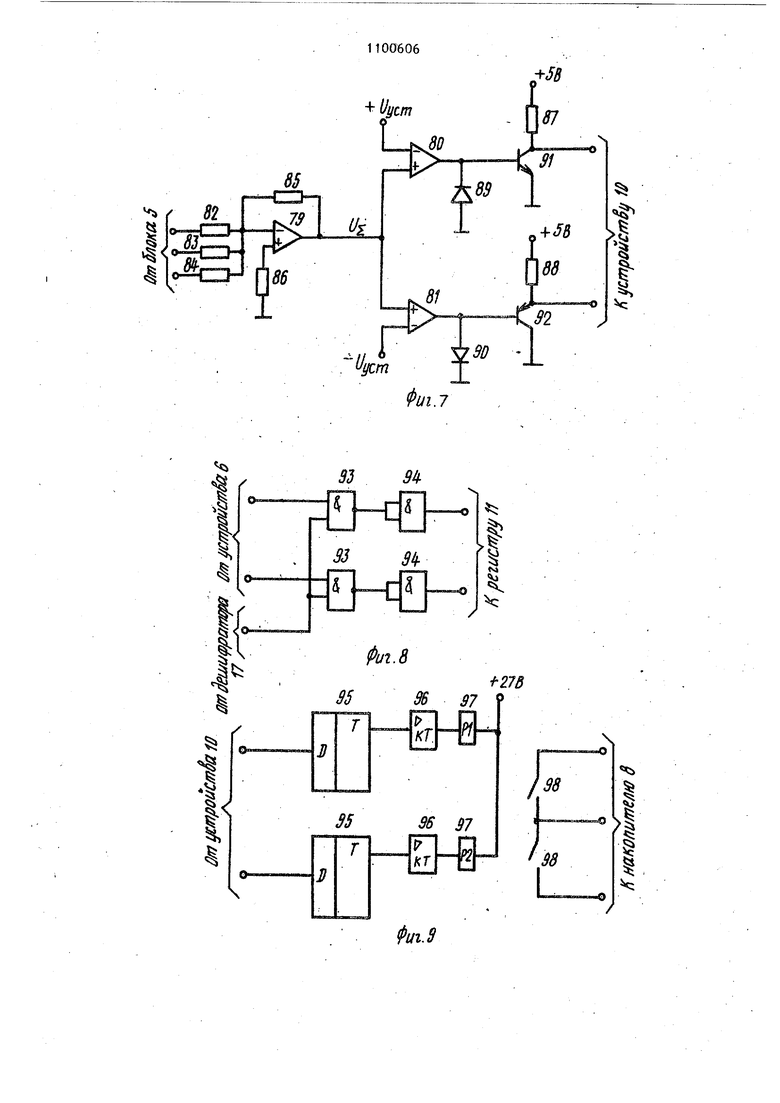
Изобретение относится к автомати ческому регулированию и может быть использовано при автоматизации технологическшс процессов, содержащих малоинерционные объекты регулирования и требующих одновременного регулирования большого количества параметров (например, в системе автоматического регулирования теплового режима мартеновской печи, у которой .необходимо поддерживать нагрузку путем регулирования расходов газа, мазута и воздуха, причем постоянные времени контуров расхода в этих условиях составляют 3-5 с, а постояиные времени нагревательных элементов в системах производства пластмассовых изделий тоже равны 3-5 с). Известен многоканальный регулятор технологических -процессов, содержащи п каналов регулирования с канальными запоминающими блоками, суммирующий блок, подключенньш к усилителю с RC-цепями на входе и в цепи обратной связи, который через коммутатор кана лов соединен с канальными запоминающими блоками, дополнительный конденсатор и три группы переключателей, через две из которых к входу суммиру п;его блока подключены соответственно выходы канальных запоминающих блоков и вьпсод усилителя, причем-одна из обкладок дополнительного конденсатора соединена с .одной из выходных клемм усилителя, а вторая обкладка через замыкающий контакт третьей контактной группы подключена к общей иине, причем конденсатор КС-цепи обратной связи подключен к общей шине через размыкающий контакт и В данном устройстве канальные запоминаюпще блоки фиксируют величину регулирующего воздействия в момент замыкания контактов всех групп пере ключателей, относящихся к данному каналу. Формирование обновленного регулирующего воздействия происходит в следующем цикле. При большой скорости изменения регулируемого параметра значение регулирующего воздействия между двумя последовательными илклами могут значительно отличаться друг от друга. Недостатком известного устройства является его низкая точность и плохое качество регулирования при управлении объектами с быстропротекяющими процессами. Известен также многоканальный ре гулятор, содержащий блок обегающих устройств, соединенный с коммутатором, блоком задающих величин, через блоки измерений и преобразования с выходами первых накопителей анало-г говых сигналов и входами исполнительных устройств, вторые корректирующие устройства и вторые накопители аналоговых величин, соединенные с блоком обегающих устройств, причем входы и выходы корректирующих устройств подключены к соответствующим выходам и входам вторых накопителей аналоговых величин, входы и выходы коммутатора соединены соответственно с пер.вьпуш и вторыми накопителями аналоговых величин 2 . Недостатком этого устройства являются его низкие точность и качество регулирования. Наиболее близким по технической сущности к предлагаемому является многоканальный регулятор, содержащий. блок обегающих устройств, соединенный первым входом с выходом блока задающих величин, вторым входом через блок измерений и преобразований - с выходом блока датчиков, третьим входом - с выходом регулирующего устройства, остальными входами - с выходами соответствующих корректирующих устройств, первым выходом через блок разделения во времени процессов измерения и регулирования - с входом регулирующего устройства, а остальными выходами через соответствующие накопители аналоговых величин - с входами соответствующих исполнительных механизмов, вторые выходы накопителей аналоговых величин соединены с входами соответствующих корректирующих устройств з . Однако область применения такого регулятора ограничивается объектами управления с достаточно большими постоянными времени (порядка сотен и тысяч секунд). Невозможность применения этого устройства для автоматизации малоинерционных объектов с постоянными времени порядка единиц и десятков секунд объясняется тем, что изменение регулируемого параметра, возникающее в таких объектах под воздействием возмущений, происходит достаточно быстро, а изменение регулирующего воздействия, компенсирующего эти возмущения, могут осуществляться только для того объекта управления, который в данный момент подключен к регулятору. Поэтому за то время, в течение которого .объект управления отключен от регулятора, изменения регулируемого параметра, возникающие в нем под воздействием возмущений, могут быть значительными Это приводит к снижению качества регулирования при управлении малоинерционными объектами. Таким образом, недостатками известного регулятора являются низкие точность и быстродействие при управлении малоинер ционными объектами. , Цель изобретения - повьшение точности и быстродействия регулятора. Поставленная цель достигается тем, что в многоканальном регуляторе содержащем блок обегающих устройств соединенный первым входом с выходом блока задающих вехгичин, вторым входом через блок измерений и преобразо ваний - с выходом блока датчиков, .третьим входом - с выходом регулирующего устройства, остальными входами - с выходами соответствующих .корректирующих устройств, первым выходом через блок разделения во времени процессов измерения и регулирования - с входом регулирующего устройства, и накопители аналоговых величин, соединенные первыми выходами с входами соответствующих исполнительных устройств, а вторыми выходами с соответствующими корректи рующими устройствами, дополнительно установ 1ены запоминающие регистры, соединенные входами с соответствующи ми выходами блока обегающих устройст а выходами - с входами соответствующих накопителей аналоговых величин. На фиг. 1 приведена структурная схема регулятора; на фиг. 2 - функциональная схема регулятора; на фиг. 3 - схема задатчйка; на фиг. 4 - схема блока измерений и пре образований ( на фиг. 5 - схема блока обегающих устройств; на фиг. 6 схема блока разделения во времени процессов измерения и регулирования, на фиг. 7 - схема регулирующего устройства; на фиг. 8 - схема рапределительного устройстваJ на фиг. 9.схема запоминающего регистра} на фиг. 10 - схема корректирующего уст06ройства; на фиг. 11 - схема накопителя аналоговых величин. Устройство содержит блок 1 задающих величин, блок 2 измерений и преобразований, блок 3 датчиков, блок 4 обегающих устройств, блок 5 разделения во времени процессов измерения и регулирования, регулирующее устройство 6, корректирующие устройства 7, накопители 8 аналоговых величин, исполнительные устройства 9, распределительные устройства 10, запоминающие регистры 11, задатчики 12, измерительные преобразователи 13, датчики 14, генератор 15 импульсов, счетчик 16, дешифратор 17, ключи 18-23, блок 24 задержки, сумматор 25, блок 26 компаратора, элементы И 27 и 28, усилитель 29 мощности, электродвигатель 30 постоянной скорости, реохорд 31, резисторы 32-49, операционные усилители 50-53, диоды 54-57, реле 58, контакты 59, 60 и 61 реле, резисторы 62-65, конденсатор 66, транзисторы 67 и 68, микросхема М002УИ1 69, счетчик 70 импульсов, дешифратор 71,, токовые ключи 72, микросхемь М001АГ1 73 и 74, конденсатор 75, инвертор 76, токовый ключ 77, реле 78, операционные усилители 79, 80 и 81, регистры 82-88, диоды 89 и 90, транзисторы 91 и 92, элементы И-НБ 93, инверторы 94, триггер 95, токовьм ключ 96, реле 97; контакты 98 реле, реохорд 99 обратной связи, потенциометр 100, конденсатор 101, резисторы 102, переключатель 103, резистор 104. Регулятор работает следующим образом. Сигналы заданного значения регулируемого параметра формуются в блоке 1 задающих величин индивидуально для каждого канала многоканального регулятора задатчиками 12. Задатчик 12 представляет собой (фиг.З) реохорд 31, движок которого устанавливается оператором, напряже- ние электрического тока, снимаемое с движка относительно крайней точки реохорда, является сигналом задания (установкой). Питание реохор да осуществляется стабилизированнь1м источником напряжения. Сигналы информации о текущем значении регулируемого параметра поступают с датчиком 14 блока 3 датчиков. Обычно датчики 14 (например, термопара) имеют нелинейную характеристику вход-выход и низкий уровень выходного сигнала. Для усиления сигналов и линеаризации характеристик датчиков 14 их выходные сигналы поступают на входы соответст эующих измерительных преобразователей 13 блока 2 измерений и преобразований. На фиг. 4 резисторы 32-35, соединенные в мостовую схему, осуществляют компенсацию влияния температуры окружающего воздуха. Усиление выходного сигнала датчика 14 осуществляется с помощью операционного усилителя 50, в котором резисторами 36 и 37 -устанавливают необходимый коэффициент усиления. Линеаризация харак теристики датчика 14 осуществляется методом кусочно-линейной аппроксимации с помощью операционных усилителей 51 и 52 за счет нелинейной обратной связи, образованной соответственно диодами 54, 55 и 56, 57. Через резистор 39 на инвертирующий вход операционного усилителя 51 подается опорное напряжение U,, через резистор 43 на инвертирующий вход операционного усилителя 52 подается опорное Напряжение VQ, тем самым задаются переломные точки на характе ристике датчика 14. Резисторы 38, 40, 41j 42, 44 и 45 задают режим работы соответственно усилителей 51 и 5 Операционньй усилитель 53 суммирует выходные сигналы усилителей 50, 51 и 52 с коэффициентами, определяемыми резисторами 46, 47, 48 и 49. С выходов блока 2 измерений и пре образований нормализованные сигналы датчиков 14 поступают на вход блока 4 обегающих устройств. Одновременно на вход блока 4 обегающих устройств поступают сигналы с блока 1 задающих величин и с выходов корректирующих устройств 7. Блок 4 обегающих устройств включает в себя генератор 15 импульсов, счетчик 16, дешифратор 17 ключи 18, 19 и 20 и распределитель|ные устройства 10. Блок 4 обегающих устройств осуществляет коммутацию сигналов датчиков 14, задатчиков 12, корректирзтащих устройств 7 и регулирующего сигнала с блока 6 таким образом, что в кйжды момент времени на вход блока 5 разде ления во времени процессов измерения и регулирования поступают только три сигнала: сигнал одного датчика 14, одного задатчика 12 и одйого корректирующего устройства 7, а выходной сигнал регулирующего устройства поступает только на одно исполнительное устройство 9. Подключение этих сигналов последовательно дпя всех каналов осуществляется контактами 59, 60 и 61, реле 58 блока 4 обегающих устройств. Через контакты 59 подключаются сигналы датчиков 14, через контакты 60 - задатчиков 12, через контакты б1 - сигт налы корректирующих устройств 7, через распределительные устройства сигналы регулирующего устройства 6. Для управления контактами 59, 60 и 61 формируются импульсы при зiapядe конденсатора 66 через резисторы 62 и 63 до напряжения, задаваемого делителем напряжения на резисторах 64 и 65. При достижении потенциала на конденсаторе 66 напряжения на делителе происходит пробой составного тиристора на транзисторах 67 и 68, конденсатор 66 разряжается и с выхода микросхемы М002УИ1 69 постзшает импульс на вход счетчика 70 импульсов. Резистор 104 задает режим работы транзистора 68. Период следования импульсов определяется постоянной времени КС-цепи (резисторы 62 и 63 и конденсатор 66) и может устанавливаться в зависимости от требований технологического процесса. На выходе счетчика 70 импульсов устанавливается двоичньй код, соответствующий числу поступивших на его вход импульсов. Двоичный код с выхода счетчика 70 импульсов поступает на вход дешифратора 71. Последовательно возбужденные выходи депгафратора 71 через ключи 72 подключают к источнику напряжения +27 В обмотки реле 58, каждое из которых .имеет по три нормально разомкнутых контакта 59, 60 и 61. Сигналы, коммутируемые с помощью контактов 59, 60 и 61, поступают на блок 5 разделения во времени процес coB измерения и регулирования, который осуществляет задержку в передаче этих сигналов на вход регулирующего устройства с целью исключить искажающее влияние неустановившихся переходных процессов в измерительных цепях на формирование регулирующего воздействия. Блок 5 разделения во времени процессов измерения и регулирования состоит из блока 24 задержки и клю7 . чей 21, 22 и 23. Блок задержки содержит микросхемы М001АГ1 73 и74 выполняющие совместно с конденсатором 75 роль одновибратора, инвертор 76, токовый ключ 77, через который включается обмотка реле 7iB. При поступлении каждого импульса с выхода микросхемы М002УН1 69 блока 4 обега щих устройств на вход микросхемы М001АГ1 73 блока 5 разделения во времени процессов измерения и регул рования осуществляется задержка в включении реле 78 относительно момента подключения датчика 14, задат чика 8 и корректирующего устройства 7 и тем самым задерживается передача сигналов через контакты 79, 80 и 81 реле 78. Контакты 79, 80, 81 реле 78 выполняют роль ключей 21, 22 и 23. Через контакт 79 на вход регулирующего устройства 6 передает ся сигнал датчика. 14, через контакт 80 - сигнал задатчика 12, через кон такт 81 - сигнал корректирующего устройства 7. Регулирующее устройство 6 состои из сумматора 25 и блока 26 компаратора. В регулирующем устройстве 6 осуществляется суммирование трех входных сигналов на операционном усилителе 79, в котором с помощью резисторов 82-86 устанавливается не обходимый коэффициент усиления в ре жиме работы. Релейная характеристик выходного сигнала, необходимая для управления исполнительными механизмами постоянной скорости формируетс компаратором, вьтолненньм на операционных усилителях 80, 81, не охваченных обратными связями, и диодах 89 и 90. Зона нечувствительности управляющего сигнала определяется величиной напряжения +UucT Усиление по мощности сигнала управления осуществляется транзисторами 91 и 92 с резисторами 87 и 88 в коллекторной цепи. Выходной сигнал Vj операционного усилителя 79 сравнивается с напряже нием : ус танок VIJC-T H -V(.f. Выходной сигнал регулирующего устройства 6 представляет собой двухразрядный двоичный код, который в зависимости от соотношения входных сигналов., т.е. от величины выходного сигнала операционного усилителя 79, может принимать три значения: 00, если -Vy. Vj +УЧСТ , 0,1, если V4. г .+V,T, 10, если Vs :: -VijcT 06 .8 С регулирующего устройства 6 выходной сигнал поступает на первые входы всех распределительных устройств 10, но проходит только через то распределительное устройство 10, на вход которого поступает разрещающий сигнал с дешифратора 17. Распределительное устройство 10 включает в себя элементы И 27 и 28. Каждое распределительное устройство 10 состоит из двух логических элементов И-НЕ 93 и двух инверторов 94. На первые входы элементов 93 поступает сигнал от регулирующего устройства 6, через вторые объединенные входы осуществляется последовательное включение распределительных устройств 10 сигналами от дешифратора 17. Таким образом, выходной сигнал регулирующего устройства 6, который осуществляет изменения регулирующего воздействия регулятора, через распределительные устройства 10 попадает на вход запоминающих регистров 11, где осуществляется его запись и хранение до следующего момента подключения к данному каналу регулирования. Запоминающий регистр 11 каждого канала состоит из двух триггеров 95, каждый из которых осуществляет- запоминание .соответствующего состояния выходного сигнала регулирующего устройства 6. Выходной сигнал триггера 95 через токовый ключ 96 подает напряжение на обмотку реле 97. Выходной сигнал регистра 11 через контакты 98 поступает на вход накопителя . 8 аналоговых величин и воздействует на него (в зависимости от записанной в регистре информации) тремя различными способами, при этом выходной сигнал накопителя 8 аналоговых величин либо возрастает с постоянной скоростью (в регистре -01), либо убывает (в регистре - 10), либо остается без изменения (в регистре -.00). Таким образом, изменение регулирующего воздействия на управляемый процесс в рассматриваемом многоточечном регуляторе происходит не только в то время, когда регулирующее устрой ство 6 подключено к данному каналу, но и после отключения регулирующего устройства от этого канала за счет запоминания выходного сигнала регулирующего устройства 6 в запоминающем регистре 11. При подключений ре91
гулирующего устройства 6 к следующему каналу сигнал, записанный в запоминающем регистре 11 предьщущего канала, соответствующего значению выходного -сигнала регулирующего устройства 6 в момент ухода с предыдущего канала, продолжает воздейство вать на соответствукмций накопитель 8.аналоговых величин.
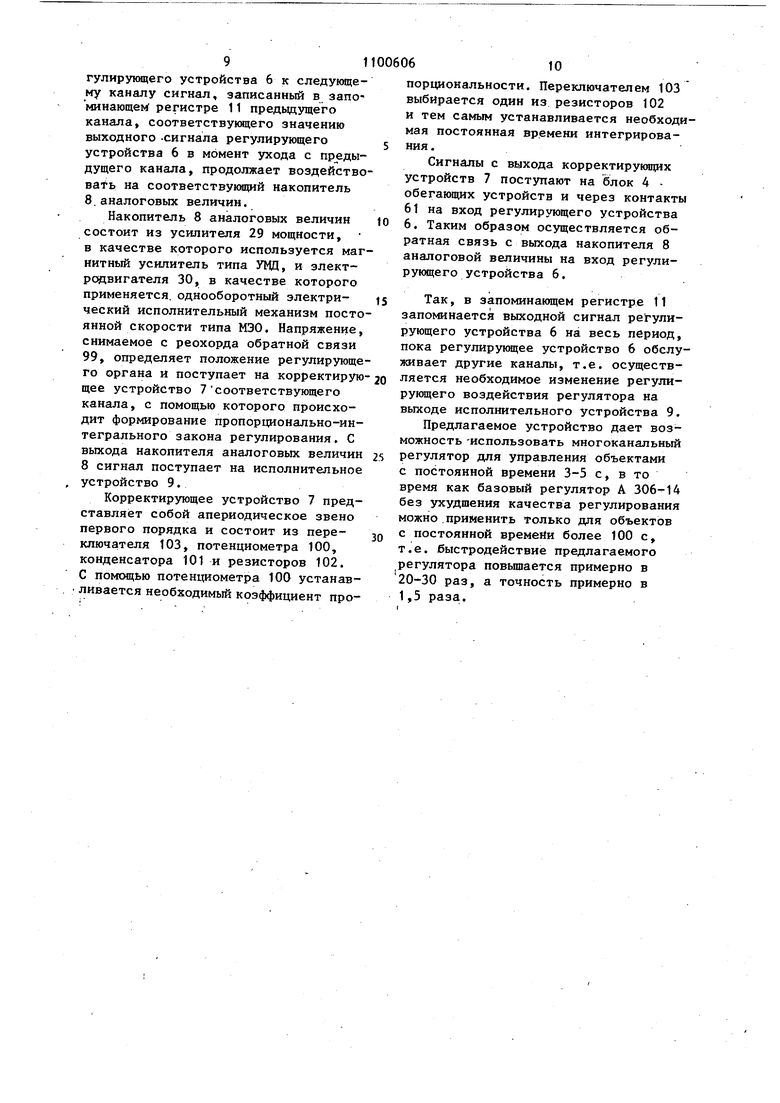
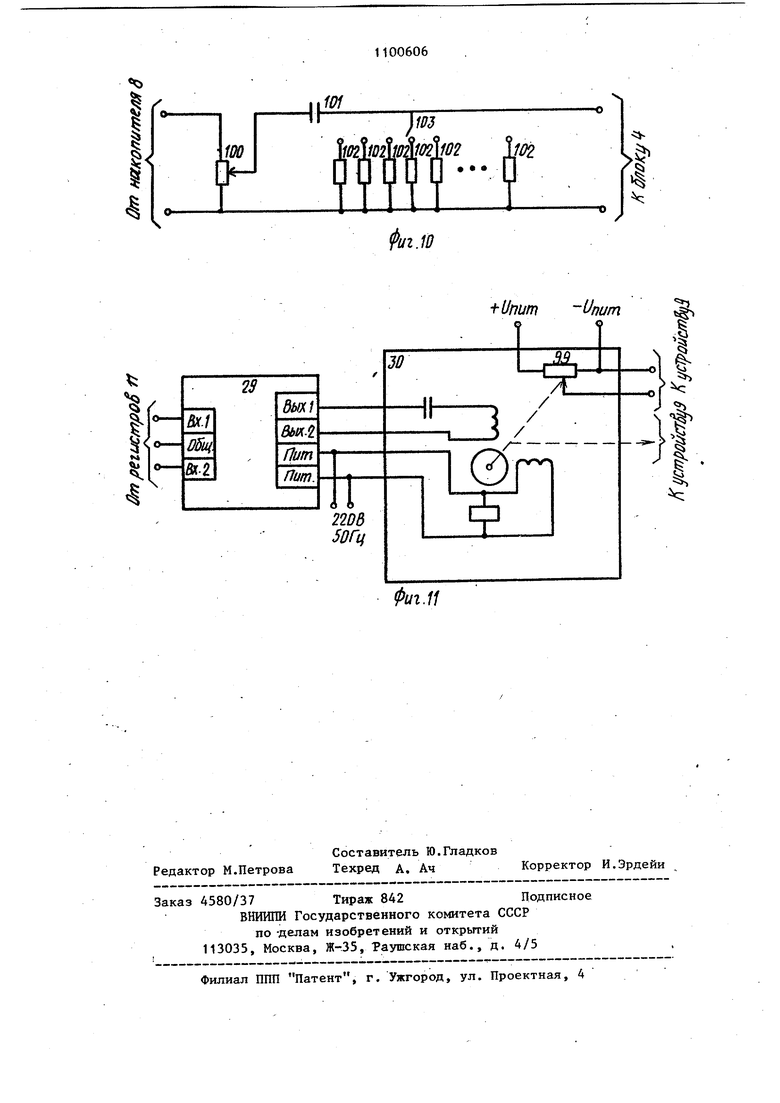
Накопитель 8 аналоговых величин состоит из усилителя 29 мощности, в качестве которого используется маг нитный усилитель типа УЩ, и злектродвигателя 30, в качестве которого применяется, однооборотный электрический исполнительный механизм посто янной скорости типа МЭО. Напряжение, снимаемое с реохорда обратной связи 99, определяет положение регулирующе го органа и поступает на корректирую щее устройство 7соответствующего канала, с помощью которого происходит формирование пропорционально-интегрального закона регулирования. С выхода накопителя аналоговых величин 8 сигнал поступает на исполнительное устройство 9.
Корректирующее устройство 7 представляет собой апериодическое звено первого порядка и состоит из переключателя 103, потенциометра 100, конденсатора 101 и резисторов 102. С помощью потенциометра 100 устанавливается необходимый коэффициент про0060610
порциональности. Переключателем 103 выбирается один из резисторов 102 и тем самым устанавливается необходимая постоянная времени интегрирова5 ния.
Сигналы с выхода корректирующих устройств 7 поступают на блок 4 обегающих устройств и через контакты 61 на вход регулирующего устройства О 6. Таким образом осуществляется обратная связь с выхода накопителя 8 аналоговой величины на вход регулирующего устройства 6.
fS Так, в запоминающем регистре 11 запоминается выходной сигнал регулирующего устройства 6 на весь период, пока регулирующее устройство 6 обслуживает другие каналы, т.е. осуществ20 ляется необходимое изменение регулирующего воздействия регулятора на выходе исполнительного устройства 9. Предлагаемое устройство дает возможность -использовать многоканальный
25 регулятор для управления объектами с постоянной времени 3-5 с, в то время как базовый регулятор А 306-14 без ухудшения качества регулирования можно применить только для объектов
30 с постоянной времени более 100 с, т.е. быстродействие предлагаемого регулятора повышается примерно в 20-30 раз, а точность примерно в 1,5 раза.
Cvj
p
Опит -
J/
.
1
L
Риг.З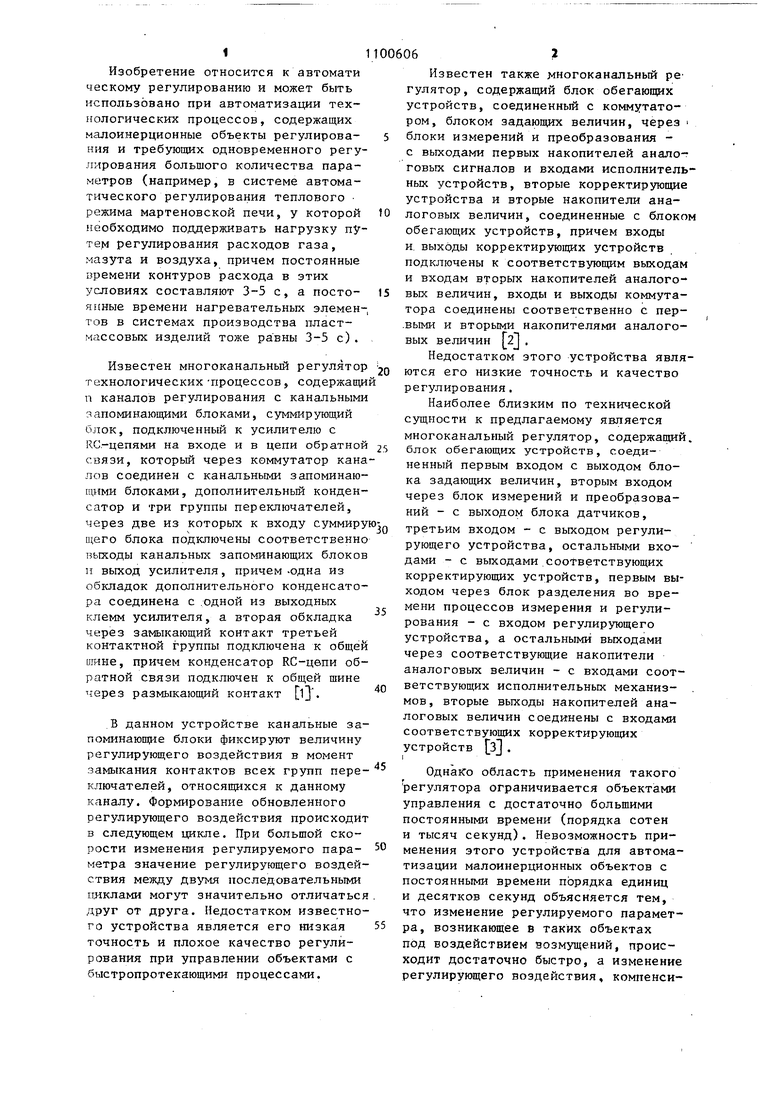

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| Многоточечный регулятор | 1983 |
|
SU1164675A1 |
| СИСТЕМА МНОГОТОЧЕЧНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU316084A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Многоканальный адаптивный регулятор | 1978 |
|
SU798703A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ БИОЛОГИЧЕСКОЙ АКТИВНОСТИ МОЗГА | 1993 |
|
RU2076625C1 |
| Многоканальный регулятор | 1977 |
|
SU697968A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Регулятор постоянного тока для измерения тока срабатывания защиты стабилизаторов напряжения | 1982 |
|
SU1051522A1 |
| Устройство для управления шаговым двигателем | 1982 |
|
SU1102005A1 |

МНОГОКАНАЛЬНЫЙ РЕГУЛЯТОР, . содержащий блок обегающих устройств, соединенный первым входом с выходом блока задающих величин, вторым входом через блок измерений-и преобразований - с выходом блока датчиков. третьим входом - с выходом регулирукицего устройства, остальными входами - с выходами соответствующих корректирующих устройств, первым выходом через блок разделения во время процессов измерения и регулирования - с входом регулирующего устройства, и накопители аналоговых величин, соединенные первыми выходами с входами соответствующих исполнительных устройств, а вторыми выходами с соответствующими корректирующими устройствами, отличающийся тем, что, с целью повышения точности и быстродействия регус лятора , в нем дополнительно установлены запоминающие регистры, соеди(Л ненные входами с соответствующими выходами блока обегающих устройств, а выходами - с входами соответствующих накопителей аналоговых величин. Ш/ . I-G О5 о О: 
уст
i-Unum -Упит
фиг.11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МНОГОКАНАЛЬНЫЙ РЕГУЛЯТОР ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 0 |
|
SU330427A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
