го, устройство содержит блок управления торможением (БУТ) 17, датчик напряжения 10, регулятор частоты (РЧ) 11, пульт управления 12, широт- но-импульсньй прерыватель 16. Введение блока двухзонного регулирования 13 и датчика частоты 15, интегрального регулятора тока 14 и выполнение БУТ 17 на генераторе опорного напряжения 18, компараторе 19 и формиро1
Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в химической, горнодобывающей, металлургической и других отраслях промьшш.енности для торможения асинхронных электроприводов, питающихся от статических преобразователей частоты со звеном постоянного тока и не именщих устройств .цля рекуперации энергии в сеть.
Цель изобретения - повышение эффек тивности торможения в широком диапазоне регулирования скорости двигателя.
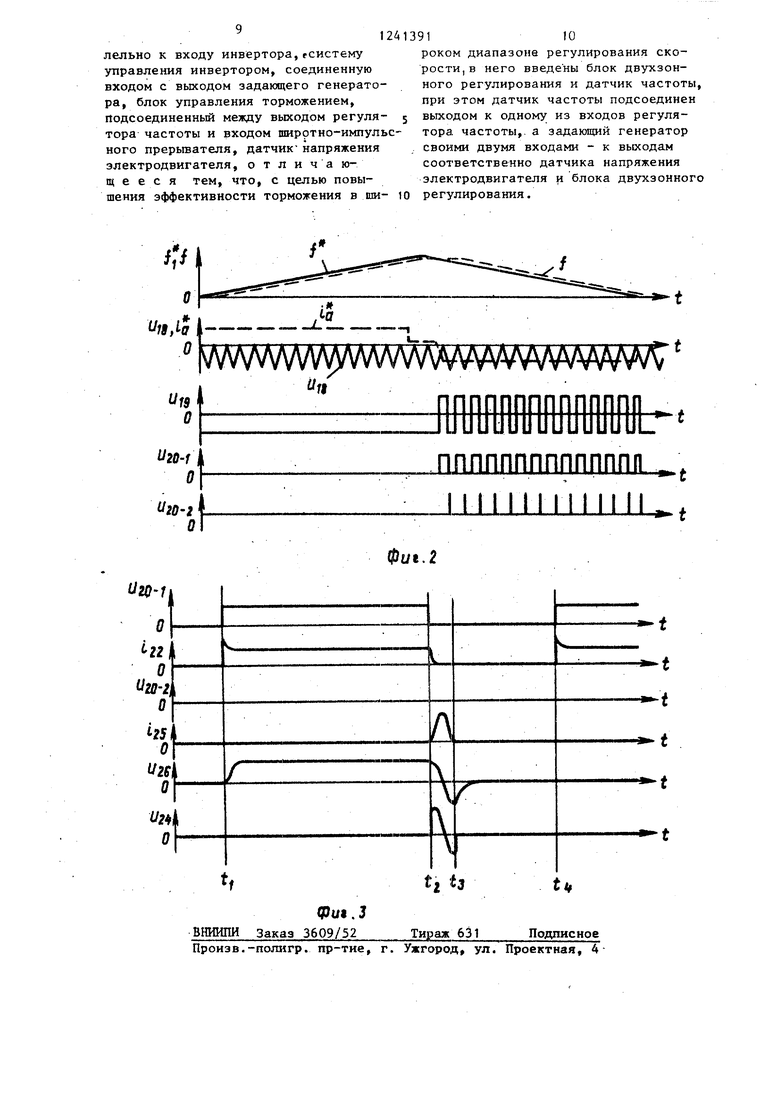
На фиг. 1 изображена функциональная схема устройства для торможения частотно-регулируемого асинхронного электродвигателя} на фиг. 2 - временные диаграммы работы блока ynpaie- ттения торможением; на фиг. 3 - временые диаграммы работы блока щиротно- импульсного прерьшателя токаФункциональная схема устройства для торможения частотно-регулируе- мого электродвигателя 1 (фиг. 1) содержит управляемый выпрямитель 2 с системой управления выпрямителем 3, соединенной своим входом с выходом регулятора 4 тока, подключенного од- ним из своих входов с выходом датчика 5 тока управляемого выпрямителя, сглаживакзаций LC фильтр 6, включенный между выходом управляемого выпрямителя 2 и входом инвертора 7, к выходу которого подключен асинхронньй электродвигатель 1, систему 8 управления инвертором, соединенную входом с выходом задающего генератора 9, один из входов которого подключен к выходу датчика 10 ЭДС или напряжения
вателе и тульсов 20 упрощает и сн};жа- ет стоимость устройства с регулированием интенсивности торможения электродвигателя. Это достигаемся управлением скважностью времени подключения резисторов динамического торможения, а расширение диапазона регулирования скорости - изменением частоты выходного напряжения вьше номинального значения. 3 ил.
j 0
5
0 5п
5
электродвигателя, регулятор 11 частоты, подсоединенный одним из своих входов с одним из выходов пульта 12 управления, блок 13 двухзонного регулирования, интегральный регулятор 14 тока, датчик 15 частоты, широтно- имгЕульсньй прерыватель 16 тока тормозного резистора, подключенньй параллельно входу инвертора 7, и блок 17 управления торможением, содержа- 1ЦИЙ последовательно соединенные генератор 18 опорного напряжения, компаратор 19 и формирователь 20 импульсов. Регулятор 11 частоты своим вторым входом через датчик 15 частоты связан с выходом задакицего генератора 9, а выходом - с одним из входов интегрального регулятора 14 тока, лодключенного вторым своим входом к выходу датчика 5 тока управляемого 1зыпрям теля, а выходом - к второму входу регулятора 4 тока, подсоединенного третьим своим входом к выходу датчика 10 ЭДС или напряжения электродвигателя, а второй вход задающего генератора 9 соединен с выходом блока 13 двухзонного регулирования, подсоединенного своими входами к выходу датчика 10 ЭДС или напряжения электродвигателя и второму выходу пульта 12 управления. Второй из входов компаратора 19 подключен к выходу регулятора 11 частоты, а выход формироват-еля 20 импульсов соединен (С управляющим входом широтно-импульсного прерьшателя тормозного резистора.
Функциональная схема блока ши- ротно-импульсного прерывателя 16 тока тормоз юго резистора содержит две параллельно включенные электрические
3
цепочки, первая из которых состоит из последовательно соединенных тормозного резистора 21 и тиристора 22 вторая - из последовательно соедине ных резистора 23, дросселя 24 и тиристора 25, причем между общими точками соединения тормозного резистора 21 и тиристора 22 первой цепочки и резистора 23 и дросселя 24 второй цепочки подключен конденсатор 26.
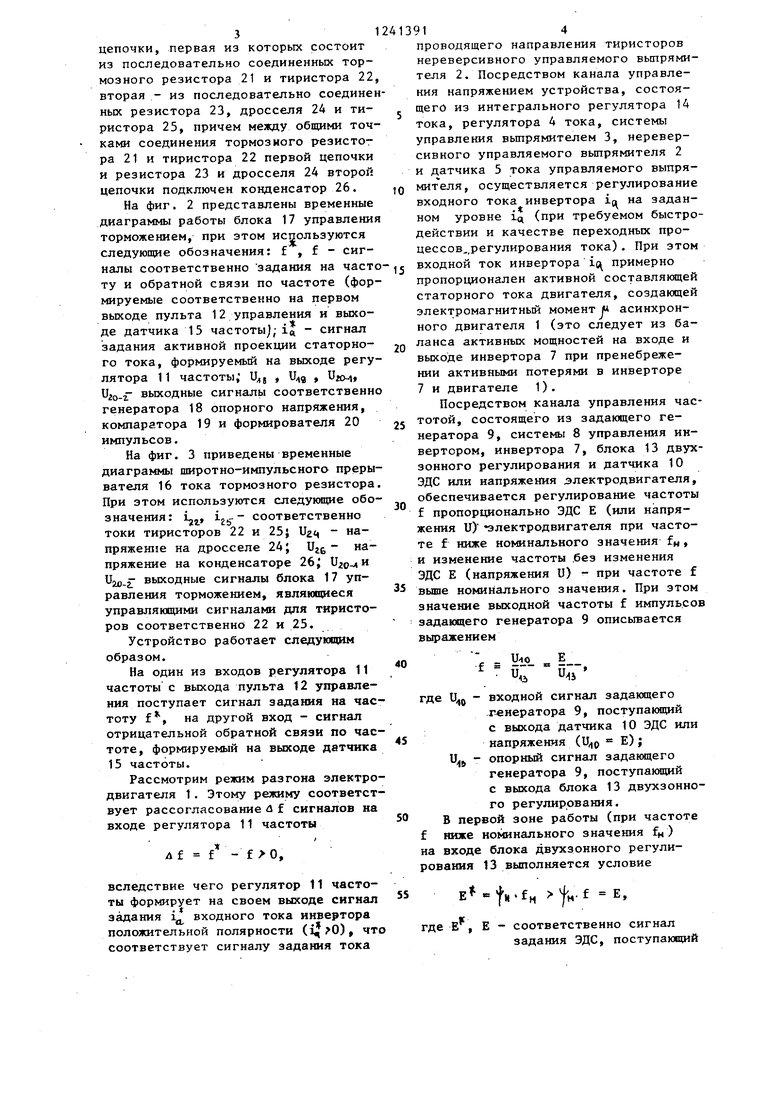
На фиг. 2 представлены временные диаграммы работы блока 17 управления торможением, при этом используются следующие обозначения: f , f - сигналы соответственно задания на часто ту и обратной связи по частоте (формируемые соответственно на первом выходе пульта 12 управления и выходе датчика 15 частоты); i - сигнал задания активной проекции статорно- го тока, формируемый на выходе регулятора 11 частоты; , Щ, , UKH to-f выходные сигналы соответственно генератора 18 опорного напряжения, компаратора 19 и формирователя 20 импульсов.
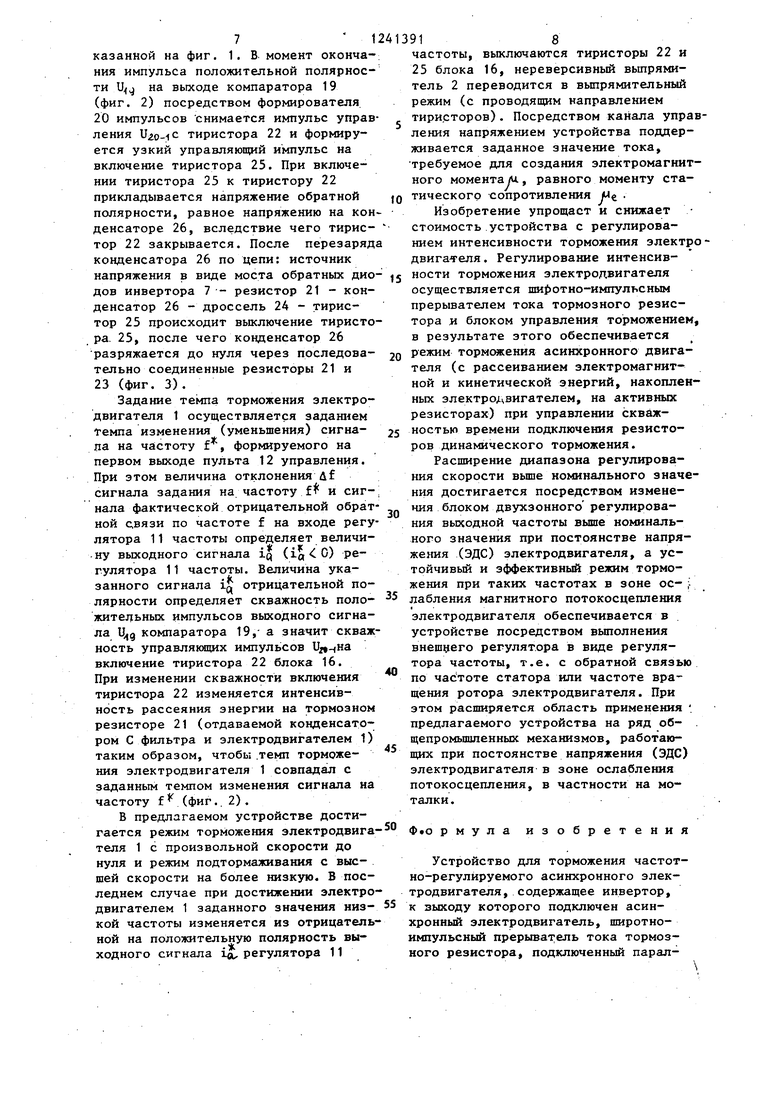
На фиг. 3 приведены временные диаграммы широтно-импульсного прерывателя 16 тока тормозного резистора. При этом используются следующие обозначения: ijy ij.,-- соответственно токи тиристоров 22 и 25} Ugt - напряжение на дросселе 24J - напряжение на конденсаторе 26 йо-Г выходные сигналы блока 17 управления торможением, являющиеся управляюощми сигналами для тиристоров соответственно 22 и 25,
Устройство работает следующим образом.
На один из входов регулятора 11 частоты с выхода пульта 12 управления поступает сигнал задания на частоту , на другой вход - сигнал отрицательной обратной связи по частоте, формируемый на выходе датчика 15 частоты.
Рассмотрим режим разгона электродвигателя 1. Этому режиму соответствует рассогласование и f сигналов на входе регулятора 11 частоты
;
Л f - f 0,
вследствие чего регулятор 11 частоты формирует на своем выходе сигнал задания i входного тока инвертора положительной полярности (i 0) что соответствует сигналу задания тока
413914
проводящего направления тиристоров нереверсивного управляемого выпрямителя 2. Посредством канала управления напряжением устройства, состоящего из интегрального регулятора 14 тока, регулятора 4 тока, системы управления выпрямителем 3, нереверсивного управляемого выпрямителя 2 и датчика 5 тока управляемого выпря- ,0 мителя, осуществляется регулирование
входного тока инвертора in на задан. t /
ном уровне iq (при требуемом быстродействии и качестве переходных про- цессов,,регулирования тока) . При этом , входной ток инвертора i( примерно
пропорционален активной составляющей статорного тока двигателя, создающей электромагнитный момент W асинхронного двигателя 1 (это следует из баланса активных мощностей на входе и вьсходе инвертора 7 при пренебрежении активными потерями в инверторе 7 и двигателе 1).
Посредством канала управления час25 тотой, состоящего из задающего генератора 9, системы 8 управления инвертором, инвертора 7, блока 13 двух- зонного регулирования и датчика 10 ЭДС или напряжения электродвигателя, обеспечивается регулирование частоты f пропорционально ЭДС Е (или напряжения и) -электродвигателя при частоте f ниже номинального значения fц, и изменение частоты .без изменения ЭДС Е (напряжения U) - при частоте f
35 выше номинального значения. При этом значение выходной частоты f импульсов задающего генератора 9 описывается выражением
20
30
Шо
U;
t2,
ь
где Ц,5 - входной сигнал задающего генератора 9, поступакиций с выхода датчика 10 ЭДС или напряжения (Ц,о Е) ;
- опорный сигнал задающего генератора 9, поступающий с выхода блока 13 двухзонно- го регулирования.
В первой зоне работы (при частоте f ниже номинального значения fn) на входе блока двухзонного регулирования 13 выполняется условие
.fH „. Е,
где Е , Е - соответственно сигнал
задания ЭДС, поступающий
512
с второго вькода пульта 12 управления, и сигнал обратной связи по ЭДС, поступакнций с выхода датчика 10 ЭДС или напряжения электродвигателя; 7н номинальное значение по- токосцепления электродвигателя .
При этом блоком 13 двухзонного регулирования формируется выходной сигнал постоянной величины 1)45 const, значит устройством реализуется закон частотного управления при постоянстве потокосцепления у
t
t |« E/f
const.
Во второй зоне работы (при частоте f вьше номинального значения f) на входе блока 13 двухзонного регулирования нарушается условие (3), вследствие чего блок 13 двухзонного регулирования изменяет (уменьшает) величину своего выходного сигнала Urj до такой величины, чтобы на его вхо-.
де поддерживалось равенство Е Е, в шизуемый во второй зоне закон частотного упра,вления при постоян- ств ЭДС электродвигателя Е Е у- f. « const достигается за счет обратно пропорционального изменения потокосцепления | двигателя от частоты f . „К.
,.
П1}и создании магнитного потокосцепления Y машины и формирования устройством активной составлянлцей i(cтaтop- ного тока двигателя электродвигателем 1 развивается электромагнитный момент согласно выражению
ум « f, i
1й
вследствие чего электродвигатель разгоняется до заданной частоты f согласно основному уравнению электропривода
j -A-j rгде/и - момент статического сопротивления, J - приведенньш момент инерции
привода, - скорость двигателя. При достижении заданного значения частоты f рассогласование Д f на входе регулятора 11 частоты стано13916
вится равным нулю, регулятором 11 частоты формируется выходной сигнал задания активной составляющей ста- торного тока постоянной амплитуды,
соответствующей созданию электродвигателем электромагнитного момента J равного моменту статического сопротивления
10
/ I
4,
При этом электродвигатель 1 перехо- дит в режим работы при установившейся скорости.
Рассмотрим режим торможения электродвигателя 1. Этому режиму соответствует рассогласование сигналов задания и обратной связи на выходе регулятора частоты, вследствие чего
регулятор 11 частоты формирует на своем выходе сигнал i отрицательной полярности (i, 0) , что соответствует сигналу задания тока нереверсивного управляемого вьтрямителя
2 в непроводящем направлении тиристоров. При этом управляемый выпрямитель 2 переводится в инверторный режим и его тиристоры закрываются. Одновременно с закрытием нереверсивного вьтрямителя 2 уровень сигнала .«, .
L(; регулятора 11 частоты становится
ниже уровня выходного сигнала генератора 18 опорного напряжения, изменяется на положительную полярность выходного сигнала компаратора 19
(фиг. 2). В момент наличия положительных импульсов на выходе компаратора 19 формирователем 20 импульсов формируется импульс управления UjoH на включение тиристора 22 блока 16 динамического торможения. Тиристор 22 включается через электрическую цепочку: резистор 21 - открытый тиристор 22, разряжается конденсатор фильтра 6, а также протекает ток из цепи: статорные обмотки электродвигателя 1 - вентили моста обратных диодов инвертора 7. Таким образом, на резисторе 21 рассеивается мощность, запасенная конденсатором С фильтра 6, и электромагнитная и кинетическая энергии, запасенные электродвигателем 1, вследствие чего, обеспечивается режим торможения электродвигате.пя 1.
При включенном тиристоре 22 блока конденсатор 26 заряжен до напряжения, равного напряжению на конденсаторе фильтра 6, полярностью, показанной на фиг. 1. В момент окончания импульса положительной полярности на выходе компаратора 19 (фиг. 2) посредством формирователя. 20 импульсов снимается импульс управления тиристора 22 и формируется узкий управляющий импульс на включение тиристора 25. При включении тиристора 25 к тиристору 22 прикладывается напряжение обратной полярности, равное напряжению на кон денсаторе 26, вследствие чего тирис- тор 22 закрывается. После перезаряда
Изобретение упрощает и снижает стоимость устройства с регулирова нием интенсивности торможения элек двигач еля. Регулирование интенсивконденсатора 26 по цепи: источник напряжения в виде моста обратных дио- ности торможения электродвигателя дов инвертора 7 - резистор 21 - кон- осуществляется шиf oтнo-импyльcным денсатор 26 - дроссель 24 - тиристор 25 происходит выключение тиристора. 25, после чего конденсатор 26
прерывателем тока тормозного резис тора и блоком управления торможени в результате этого обеспечивается
разряжается до нуля через последовательно соединенные резисторы 21 и 23 (фиг. 3) .
Задание темпа торможения электродвигателя 1 осуществляется задаш1ем темпа изменения (уменьшения) сигна- па на частоту f, формируемого на первом выходе пульта 12 управления. При этом величина отклонения д сигнала задания на частоту ft и скг нала фактической отрицательной обратной с,вязи по частоте f на входе регулятора 11 частоты определяет величину выходного сигнала i () регулятора 11 частоты. Величина указанного сигнала i отрицательной полярности определяет скважность поло40
45
жительных импульсов выходного сигнала Ц,д компаратора 19,- а значит скважность управлякмцих импульсов Цщна включение тиристора 22 блока 16. При изменении скважности включения тиристора 22 изменяется интенсивность рассеяния энергии на тормозном резисторе 21 (отдаваемой конденсатором С фильтра и электродвигателем 1) таким образом, чтобы .темп торможения электродвигателя 1 совпадал с заданным темпом изменения сигнала на частоту f (фиг..2).
В предлагаемом устройстве достигается режим торможения электродвига- теля 1 с произвольной скорости до нуля и режим подтормаживания с вые- . шей скорости на более низкую. В последнем случае при достижении электроРасширение диапазона регулиров ния скорости выше номинального зн ния достигается посредством измен ния блоком двухзонного регулирова ния выходной частоты выше номинал ного значения при постоянстве нап жения (ЭДС) электродвигателя, а у тойчивый и эффективный режим торм жения при таких частотах в зоне о 35 лабления магнитного потокосцеплени электродвигателя обеспечивается в устройстве посредством выполнения регулятора в виде регуля тора частоты, т.е. с обратной свя по час тоте статора или частоте вр щения ротора электродвигателя. При этом расширяется область применени предлагаемого устройства на ряд об щепромьшшенных механизмов, работаю щих при постоянстве напряжения (ЭД электродвигателя- в зоне ослабления потокосцепления, в частности на мо талки.
рмула изобретени
Устройство для торможения часто но-регулируемого асинхронного элек тродвигателя, содержащее инвертор.
двигателем 1 заданного значения низ- 55 выходу которого подключен асинкой частоты изменяется из отрицательной на положительную полярность выходного сигнала ia, регулятора 11
частоты, выключаются тиристоры 22 и 25 блока 16, нереверсивный выпрямитель 2 переводится в вьшрямительный режим (с проводящим направлением тиристоров). Посредством канала управления напряжением устройства поддерживается заданное значение тока, требуемое для создания электромагнитного моментаМ, равного моменту статического сопротивления м .
Изобретение упрощает и снижает стоимость устройства с регулированием интенсивности торможения электро - двигач еля. Регулирование интенсивности торможения электродвигателя осуществляется шиf oтнo-импyльcным
ности торможения электродвигателя осуществляется шиf oтнo-импyльcным
0
0
5
прерывателем тока тормозного резистора и блоком управления торможением, в результате этого обеспечивается
20 режим тормснкения асинхронного двигателя (с рассеиванием электромагнитной и кинетической энергий, накопленных электродвигателем, на активных резисторах) при управлении скваж5 ностью времени подключения резисторов динамического торможения.
Расширение диапазона регулирования скорости выше номинального значения достигается посредством изменения блоком двухзонного регулирования выходной частоты выше номинального значения при постоянстве напряжения (ЭДС) электродвигателя, а устойчивый и эффективный режим торможения при таких частотах в зоне ос- ;- 5 лабления магнитного потокосцепления электродвигателя обеспечивается в устройстве посредством выполнения регулятора в виде регулятора частоты, т.е. с обратной связью по час тоте статора или частоте вращения ротора электродвигателя. При этом расширяется область применения . предлагаемого устройства на ряд об- . щепромьшшенных механизмов, работающих при постоянстве напряжения (ЭДС) электродвигателя- в зоне ослабления потокосцепления, в частности на моталки.
рмула изобретения
Устройство для торможения частотно-регулируемого асинхронного электродвигателя, содержащее инвертор.
выходу которого подключен асинхронный электродвигатель, широтно- импульсный прерыватель тока тормозного резистора, подключенный параллельно к входу инвертора,гсистему управления инвертором, соединенную входом с вькодом задающего генератора, блок управления торможением. Подсоединенный между вькодом регулятора частоты и входом широтно-импульс- ного прерьтателя, датчик напряжения электродвигателя, отличающееся тем, что, с целью повышения эффективности торможения в ши- ю
139110
роком диапазоне регулирования скорости, в него введены блок двухзон- ного регулирования и датчик частоты, при этом датчик частоты подсоединен выходом к одному из входов регулятора частоты,, а задающий генератор своими двумя входами - к выходам соответственно датчика напряжения электродвигателя и блока двухзонного регулирования.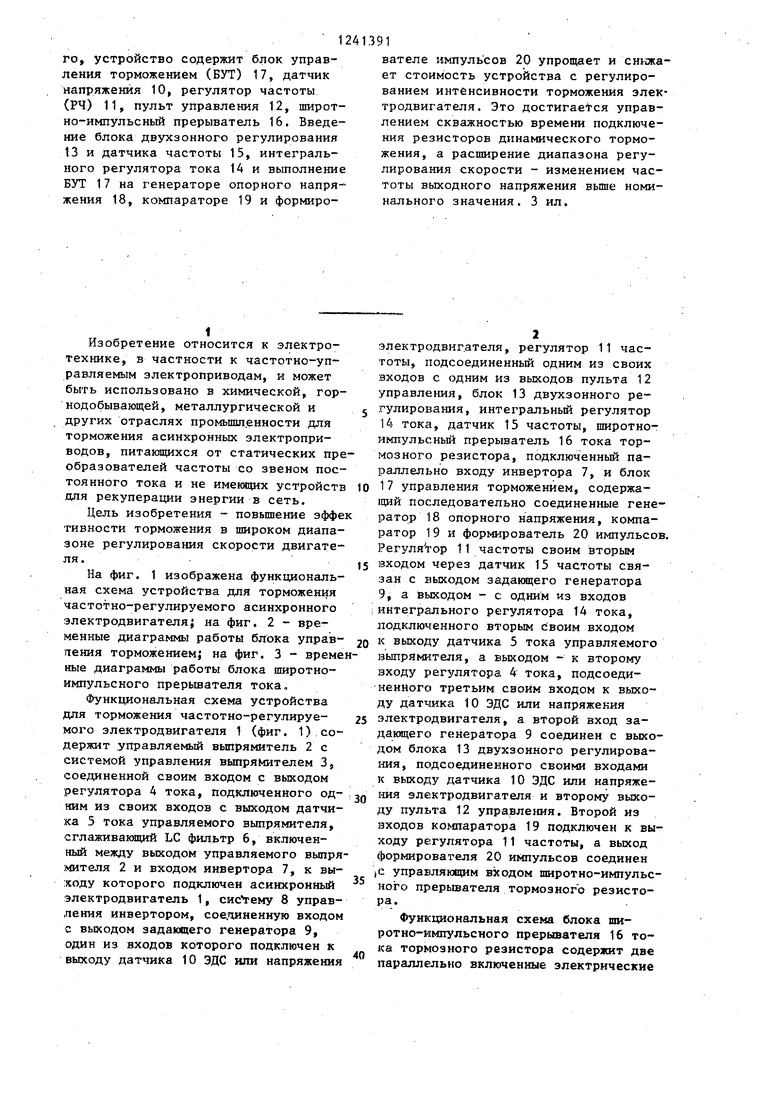
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Частотно-регулируемый электпропривод | 1979 |
|
SU879724A1 |
| Двухзонный вентильный электродвигатель | 1984 |
|
SU1197017A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
Изобретение относится к электротехнике, в частности к статическим преобразователям частоты со звеном постоянного тока. Цель изобретения - повышение эффективности торможения в широком диапазоне регулирования скорости двигателя. Устройство содержит, частотно-регулируемый электродвигатель 1, управляемый выпрямитель 2 с системой управления 3, регулятор тока 4, датчик тока 5, LC-фильтр 6, инвертор 7, систему управления 8, задающий генератор (ЗГ) 9. Кроме тоГ«П 9«t.r
Uzo-r
о
ППШ1ПППППППППП
lllllllillll
Фиг.2
| Устройство для торможения частотнорегулируемого электропривода | 1976 |
|
SU661706A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лихошерст В.И., Копьфин B.C | |||
| Динамика асинхронного электропривода при инверторном торможении | |||
| - Изв | |||
| Вузов | |||
| Горный журнал, 1975, № 9, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |
