Изобретение относится к электротехнике, в частности, к частотно-управляемым электроприводам, и может быть использовано в различных отраслях промышленности: химической, нефтедобывающей, атомной энергетике, в коммунальном хозяйстве, в мелиорации и в других отраслях, - для регулирования производительности насосных и компрессорных установок.
Целью изобретения является уменьшение электрических потерь в электроприводе с вентиляторным моментом статического сопротивления и повышение точности стабилизации скорости электропривода.
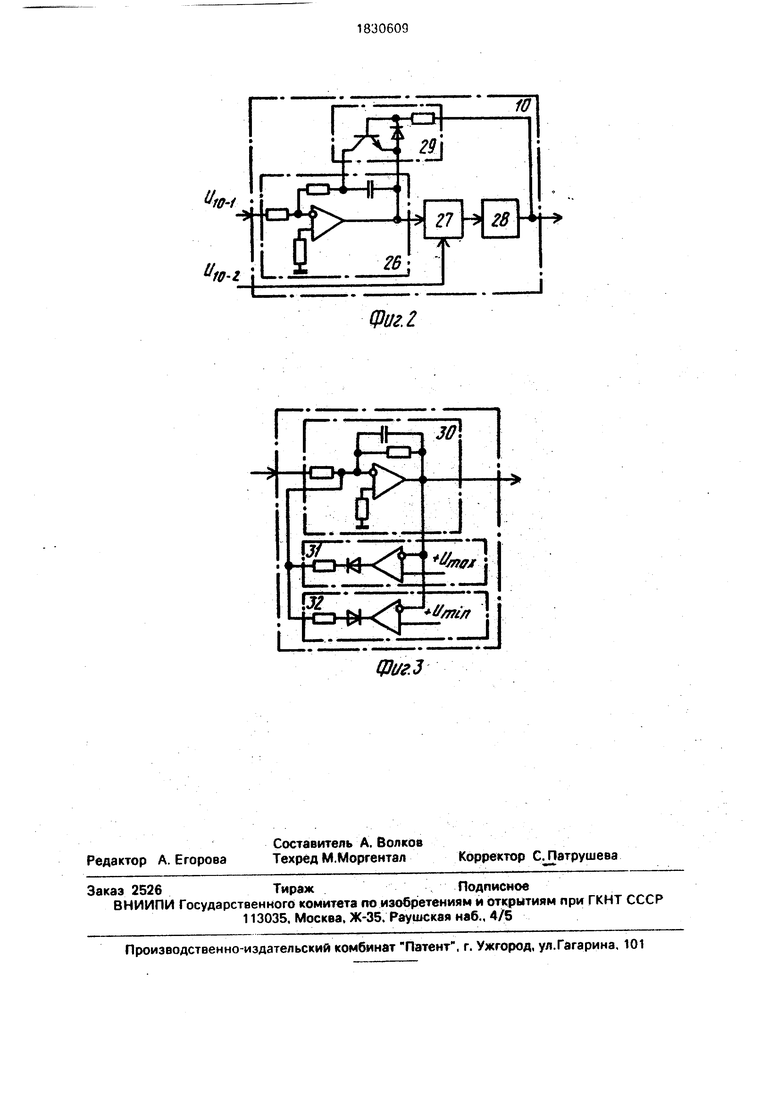
На фиг. 1 - функциональная схема устройства Для управления асинхронным электроприводом; на фиг. 2 -- функциональная схема задающего генератора; на фиг. 3 - функциональная схема второго фильтра и второго усилителя-ограничителя.
На фиг. 1 представлена функциональная схема устройства для управления асинсл
с
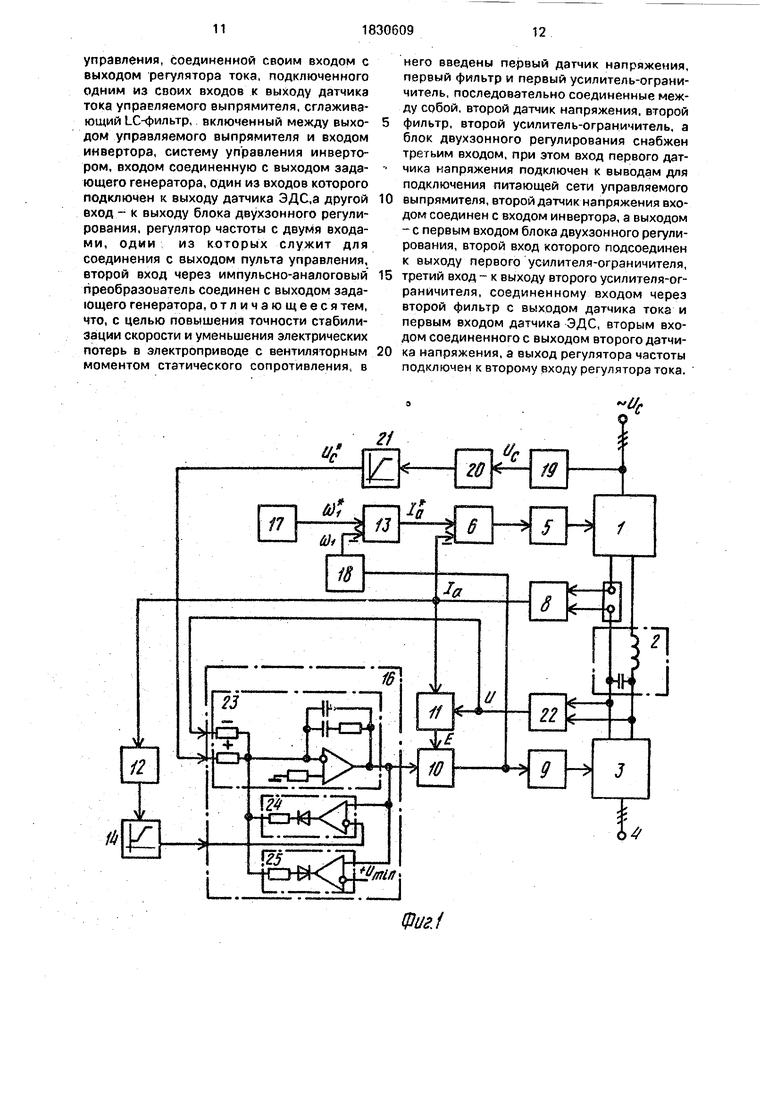
хронным электроприводом, содержащая управляемый выпрямитель 1 с системой управления выпрямителем 5, соединенной своим входом с выходом регулятора тока 6, подключенного одним из своих входов к выходу датчика тока 8 управляемого выпрямителя 1, сглаживающий LC-фильтр 2, включенный между выходом управляемого выпрямителя 1 и входом инвертора 3, систему управления инверторов 9, входом соединенную с выходом задающего генератора 10, один из входов которого подключен к выходу датчика ЭДС 11. а другой вход - к выходу блока двухэонного регулирования 16, регулятор частоты 13 с двумя входами, соединенный одним из своих входов с выходом пульта управления 17 и связанный своим вторым входом через импульсно-аналоговый преобразователь 18с выходом задающего генератора 10, первый датчик напряжения 19, первый фильтр 20 и первый усилитель- ограничитель 21, последовательно соедисосо
о о о ю
ненные между собой, второй датчик напряжения 22, второй фильтр 12, второй усилитель-ограничитель 14. При этом вход первого датчика напряжения 19 подключен к входным питающим выводам управляемого выпрямителя 1, второй датчик напряжения 22 соединен своим входом со входом инвертора 3, а выходом - с первым входом блока двухзонного регулирования 16, второй вход которого подсоединен к выходу первого усилителя-ограничителя 21, третий вход - к выходу второго усилителя-ограничителя 14, связанному своим входом через фильтр 12 с выходом датчика тока 8 и первым входом датчика ЭДС 11, соединенного вторым своим входом с выходом второго датчика напряжения 22, а выход регулятора частоты 13 подключен ко второму входу регулятора тока 6. В качестве возможного варианта реализации блок двухзонного регулирования 16 выполнен в виде интегрального регулятора 23, Охваченного отрицательной обратной связью через компараторы-ограничители верхнего 24 и нижнего 25 уровней, причем прямые входы компараторов 24 и 25 подключены к выходу регулятора 23, инверсный вход компаратора-ограничителя 25 нижнего уровня подключен к источнику питания +имин, первый и второй входы интегрального регулятора 23, инверсный вход компаратора-ограничителя 24 верхнего уровня и выход регулятора 23 являются, соответственно, первым, вторым, третьим входами и выходом блока двухзонного регулирования 16. Пульт управления 17 выполнен, например, в виде задатчика интенсивности, регулятора давления, уровня, концентрации и др.
На фиг. 2 представлен пример реализации функциональной схемы задающего генератора 10, содержащей последовательно соединенные интегратор 26, компаратор 27 и формирователь импульсов 28, связанный выходом с управляющим входом ключа 29, подсоединенного параллельно интегрирующему конденсатору интегратора 26, причем, вход интегратора 26, второй вход компаратора 27 и выход формирователя 28 являются, соответственно, первым (интегрирующим) и вторым (опорным) входами и выходом задающего генератора 10.
На фиг. 3 приведен пример реализации функциональной схемы второго фильтра 12 и второго усилителя-ограничителя 14, содержащей инерционное звено 30, охваченное отрицательной обратной связью через компараторы-ограничители верхнего 31 и нижнего 32 уровней, при этом инверсные прямые входы компараторов 31 и 32 подключены к выходу инерционного звена 30, а
инверсные входы - к источникам питания +11маке и +UMHH, причем вход и выход инерционного звена 30 являются, соответственно, входом второго фильтра 12 и выходом
второго усилителя-ограничителя 14.
Предложенное устройство для управления асинхронным электроприводом (см.фиг.1) работает следующим образом. На выходе пульта управления17(например, задатчика интенсивности, регулятора давления, уровня, концентрации) формируется сигнал задания частоты, поступающий на один из входов регулятора частоты 13, на второй вход которого поступает аналотовый сигнал аи отрицательной обратной связи фактической частоты через импульсно-аналоговый преобразователь- 18 с выхода задающего генератора 10. В функции величины и знака рассогласования, регулятор частоты 13 (например, выполненный пропорционально-интегральным) формирует на выходе сигнал задания 1а активной составляющей статорного тока двигателя (пропорциональный требуемому
значению /г электромагнитного момента
двигателя), поступающий на один из входов регулятора тока 6. Посредством воздействия регулятора тока 6 (на второй вход которого поступает с выхода датчика тока 8
сигнал отрицательной обратной связи по фактическому току а в звене постоянного тока электропривода) через систему управления выпрямителем 5 на фазовый угол включения тиристоров управляемого выпрямителя 1, поддерживается фактическое значение тока а в звене постоянного тока на уровне заданного значения 1а. Датчик ЭДС 11, на входы которого поступают сигнал U с выхода датчика напряжения 22 (пропорциональный выходному напряжению инвертора напряжения 3) и сигнал а с выхода датчика тока 8, вычисляет приближенно модуль ЭДС двигателя на выражения:
E U-la R, (1)
где R - активное сопротивление статорной обмотки двигателя.
Посредством фильтра 12 выделяется сигнал постоянной составляющей из пульсирующего выходного сигнала а датчика тока 8, поступающий на вход второго усилителя-ограничителя 14, формирующего сигнал согласно выражения (6). Второй уси- литель-ограничитель 14 обеспечивает ограничение своего выходного сигнала на нижнем уровне, равном Мин , и верхнем уровне, равном н. Первый усилитель-ограничитель 21, на вход которого с входных
питающих шин управляемого выпрямителя 1 через датчик напряжения 19 и первый фильтр 20 поступает сглаженное напряжение, пропорциональное напряжению питающей сети Uc, формирует на своем выходе сигнал
Uc, при Uc UH;
г uc, при ис ин; 4
LUH, при Uc UH,
(2)
где UH - номинальное напряжение питающей сети;
На первый вход блока двухзонного регулирования 16 (первый вход интегрального регулятора 23) поступает с выхода датчика напряжения 22 сигнал U, пропорциональный напряжению двигателя, на второй вход блока 16 (второй вход регулятора 23) - поступает сигнал Uc с выхода первого усилителя-ограничителя 21, на третий вход блока 16 (инверсный вход компаратора-ограничителя 24 верхнего уровня) - поступает сигнал с выхода второго усилителя-ограничителя 14. В режиме работы, характеризующемся превышением питающего напряжения сети Uc над выходным напряжением двигателя (Uc U), интегрирующий усилитель 23 блока 16 находится в состоянии ограничения входного сигнала в положительной полярности с уровнем, определяемым компаратором-ограничителем 24 верхнего уровня, т.е. на уровне текущего выходного сигнала второго усилителя-ограничителя 14. Таким образом, при работе усилителя-ограничителя 14 в его линейной зоне, путем воздействия выходных сигналов датчика ЭДС 11 и блока двухзонного регулирования 16 на интегрирующий и опорный входы задающего генератора 10, задается инвертору 3 частота f
) U (1/1н)
(3)
и в электроприводе реализуется экономический закон управления (по минимуму электрических потерь в двигателе), для которого справедливы соотношения:
.,3,,
cos const;
I la/COS (/)
где fn. Ен, IH - номинальные значения частоты, ЭДС и статорного тока двигателя, соответственно;
рн - угол в номинальном режиме между векторами ЭДС и статорного тока двигателя;
I - модуль статорчого тока двигателя, 5Верхнее ограничение второго усилителя-ограничителя 14 обеспечивает в режиме разгона привода с токами двигателя, более номинального значения, ограничение магнитного потока двигателя на уровне номиналь0 ного значения Фн : нижнее ограничение усилителя-ограничителя 14 обеспечивает при малых нагрузках в двигательном режиме и при режиме торможения ограничение минимального значения магнитного потока
5 двигателя на уровне Фмм &н .
В режиме работы с присадкой питающего напряжения, характеризующимся превышением напряжения двигатели над напряжением питающей сети (Uc U), ин0 тегральный регулятор 23 блока 16 выходит из состояния ограничения на верхнем уровне, оставаясь с положительной полярностью выходной сигнал регулятора 23 уменьшается по амплитуде до значения,
5 при котором (из-за происходящего снижения амплитуды сигнала на опорном входе задающего генератора 10) уменьшающееся значение магнитного потока двигателя не обеспечит восстановление и поддержание
0 равенства напряжения двигателя с питающим напряжением сети (Uc U). Поддержание последнего соотношения обеспечивает высокую точность стабилизации выходной частоты электропривода независимо от сни5 жения питающего напряжения сети (в пределах 0,85 от номинального значения питающего напряжения). За счет следящего за сетью изменения уровня уставки мак- симального выходного напряжения
0 двигателя, в зависимости от величины питающего напряжения регулируется максимальное значение противо-ЭДС инвертора (двигателя) таким образом, чтобы независимо от изменения величины напряжения пита5 ющей сети достигалось устойчивое регулирование тока в главной цепи электропривода. В результате указанного управления в электроприводе достигается устойчивая стабилизация частоты, момента и тока деигате0 ля при пониженных значениях напряжения сети. Компаратор-ограничитель нижнего уровня 25 блока 16 обеспечивает минимальное ограничение выходного сигнала блока 16 {из-за возможных перерегулирований
5 вниз выходного сигнала интегрального регулятора 23) во избежание чрезмерного динамического ослабления магнитного потока двигателя (которое может привести к медопустимому снижению перегрузочной способности двигателя по моменту).
Для электропривода с вентиляторным моментом статического сопротивления ее-, личина выходного токоограничения в двига- тельном режиме () задается амплитудной уставки ограничения выходного сигнала положительной полярности регулятора частоты (на уровне 1амакс /соз рн. При наличии начального пускового момента статического сопротивления (вызванного трением в подшипниках, уплотнениях, затвердением смазки), выходной ток двигателя устанавливается при пуске равным токоограничению, в результате чего двигатель преодолевает начальный момент сопротивления и разгоняется с номинальным значением потока, обладая высокой перегрузочной способностью по моменту. В тормозном режиме(wVa)) регулятор частоты 13 формирует на своем выходе нулевой сигнал (1а 0), активная составляющая статор- ного тока двигателя а(в звене постоянного тока) снижается до нуля, блок двухзонного регулирования 16 формирует на своем выходе сигнал уставки нижнего ограничения 1мин. обеспечивающий нижний уровень ослабления магнитного потока двигателя при торможении; двигатель привода тормозится с нулевым значением активной составляющей тока и ослабленным магнитным потоком под воздействием момента статического сопротивления на валу рабочего механизма (насоса, компрессора).
Задающий генератор 10, выполненный по функциональной схеме на фиг. 2, работает следующим образом: на выходе интегратора формируется пилообразное напряжение с периодом, обратно пропорциональным уровню сигнала Uio-i на первом входе генератора, и амплитудой, равной уровню сигнала Uio-2 на втором входе генератора. При достижении амплитудой выходного сигнала интегратора 26 уровня сигнала Uio-2. изменяется полярность выходного сигнала компаратора 27, формируется узкий импульс нормированной длительности на выходе формирователя 28, на время длительности которого открывается ключ 29, разряжается конденсатор обратной связи интегратора 26, далее работа повторяется. При этом частота выходных узких прямоугольных импульсов задающего генератора находится из выражения:
fro-Uio-i/Uio-2
(7)
Второй фильтр 12 и второй усилитель- ограничитель 14, выполненные по функциональной схеме (см.фиг.З), работают следующим образом: инерционное звено 30/ в статическом режиме, реализует линейную передаточную функцию вида (5), определяемую отношением сопротивлений резистора обратной связи и входного резистора, и одновременно реализует фильтрующее звено низкой частоты, выделяющее постоянную составляющую из фактического пульсирующего сигнала датчика тока 8 (постоянная времени фильтра определяется произведением величин сопротивления резистора и емкости конденсатора в обратной связи инерционного звена 30). Посредством компараторов-ограничителей верхнего 31 и нижнего 32 уровней осуществляется ограничение наибольшего и наименьшего выходного сигнала усилителя-ограничителя 14 (на уровне сигналов +имакс и +имин. поступающих на прямые входы компараторов 31 и 32),
В результате описанного функционирования предложенного устройства (фиг.1) в основном рабочем диапазоне изменения
частоты и нагрузки электропривода (с вентиляторным характером изменения момента статического сопротивления), в двигателе создается управление при постоянстве коэффициента мощности (4); пропорционально изменяются модуль 1, активная составляющая 1 а статорного тока двигателя и магнитный поток Фдвигателя, что означает создание экономического закона управления асинхронным двигателем, предложенного
М.П.Костенко:
Ф {и
где ft - электромагнитный момент двигателя.
В предложенном устройстве достигается уменьшение электрических потерь для электропривода с вентиляторным моментом статического сопротивления за счет того, что с изменением нагрузки на валу двигателя привода изменяется его магнитный поток в функции (8) от величины электромагнитного момента двигателя (в отличие от устройства-прототипа, в котором поддерживалось неизменным значение магнитного потока, равное номинальному значению), что обеспечивает выделение минимальных электрических потерь в асинхронном двигателе. Кроме того, за счет того, что в предложенном устройстве при нагрузках менее номинального значения, преобразователи частоты электроприводов работают с меньшими значениями выходных напряжений (чем в прототипе), снижаются электрические
потери в преобразователе частоты (из-за уменьшения выделяемых потерь в RC-цепях силовых тиристоров, транзисторов инвертора). С учетом того, что насосные установки, компрессоры, как правило, в ночное время (составляющее 1/3 суток) работают при нагрузке равной и менее 0,5 от номинальной, то применение предложенного устройства для таких условий работы обеспечивает экономию электроэнергии на 1-3%.
В частности, общие электрические потери в асинхронном двигателе содержат две составляющие:
ZPg PFe + РМ (Рре)н f1 5 Ф +
+ (Рм)н I2,
(9)
где Рре, Рм - потери в стали и меди двигателя;
(РРе)н, (РМ)н - номинальные потери в стали и меди двигателя;
f, Ф, I - относительные значения частоты, потока и статорного тока двигателя (за базовые величины принимаются номинальные значения указанных величин).
С учетом того, что для общепромышленных асинхронных двигателей в номинальном режиме
0,5 ДРн,
(Ю)
для переменных значений частоты и потока потери в двигателе определяются из выражения;
SPg 0,5 АРН f1-5 Ф + 2.
(11)
где ДРН (1 - /н)Рн - потери в двигателе в номинальном режиме;
т}н, Рн - номинальные значения КПД и выходной мощности двигателя.
С учетом того, что потери в RC-цепях инвертора преобразователя частоты пропорциональны выходной частоте и квадрату выходного напряжения, а также составляют на практике в номинальном режиме около 1% от номинальной выходной мощности преобразователя, то эти потери можно определить из формулы
ДРяс ±iO,01 Рн-f-U2
(12)
где U - относительное значение выходного напряжения преобразователя (по отношению к его номинальному значению).
Для электропривода с номинальной мощностью двигателя 75 кВт, имеющий КПД - 0,92, при работе на выходной частоте
0,7 TH с вентиляторным моментом статиче ского сопротивления вида с с f2, рассчитаем электрические потери из выражений (11) и (12) для устройства-прототипа;
Р2 ZPg + ЛРрс - 0.5 6К0.7)1-5 (0,7)2 +
+(0,7)2 +0,001-75-0,7 (0,7) 1- 2,46 кВт (14) .
для предложенного устройства.
Таким образом, в предложенном устройстве достигается экономия электроэнер- гии (по сравнению с прототипами) при работе с вентиляторным моментом статического сопротивления в рассмотренном режиме, равная:
AP/PH-ZPl ZP2-100
Рн
3,50 -2,46 75
100 1,4 %
(15)
В предложенном устройстве достигается повышение точности стабилизации скорости электропривода при изменении момента статического сопротивления. Повышение
точности стабилизации скорости электропривода (с внешним датчиком частоты статора) при изменении момента нагрузки достигается за счет поддержания постоянного значения (на уровне номинального)
скольжения двигателя путем регулирования потока двигателя в функции момента согласно экономичного закона управления. Вследствие стабилизации двух величин; выходной частоты (астатическим регулятором
частоты) и скольжения (путем задания постоянной величины скольжения), - в предложенном электроприводе обеспечивается автоматическая стабилизация на заданном уровне скорости двигателя при изменении
момента нагрузки на валу двигателя. Следовательно, по сравнению с стройством-про- тотипом (в котором при стабилизации частоты и магнитного потока изменение скорости электропривода определяется наклоном механической характеристики двигателя) точность стабилизации скорости увеличивается на величину номинального скольжения двигателя, т.е. примернона2-3%.
Формула изобретения
Устройство для управления асинхронным электроприводом, содержащее управляемый выпрямитель с выводами для подключения питающей сети и с системой
управления, соединенной своим входом с выходом регулятора тока, подключенного одним из своих входов к выходу датчика тока управляемого выпрямителя, сглаживающий LC-фильтр, включенный между выхо- дом управляемого выпрямителя и входом инвертора, систему управления инвертором, входом соединенную с выходом зада- ющего генератора, один из входов которого подключен к выходу датчика ЭДС.а другой вход - к выходу блока двухзонного регулирования, регулятор частоты с двумя входами, один из которых служит для соединения с выходом пульта управления, второй вход через импульсно-аналоговый преобразователь соединен с выходом задающего генератора, отличающееся тем, что, с целью повышения точности стабилизации скорости и уменьшения электрических потерь в электроприводе с вентиляторным моментом статического сопротивления, в
него введены первый датчик напряжения, первый фильтр и первый усилитель-ограничитель, последовательно соединенные между собой, второй датчик напряжения, второй фильтр, второй усилитель-ограничитель, а блок двухзонного регулирования снабжен третьим входом, при этом вход первого датчика напряжения подключен к выводам для подключения питающей сети управляемого выпрямителя, второй датчик напряжения входом соединен с входом инвертора, а выходом - с первым входом блока двухзонного регулирования, второй вход которого подсоединен к выходу первого усилителя-ограничителя, третий вход- к выходу второго усилителя-ограничителя, соединенному входом через второй фильтр с выходом датчика тока и первым входом датчика ЭДС, вторым входом соединенного с выходом второго датчика напряжения, а выход регулятора частоты подключен к второму входу регулятора тока.


| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
Использование: для регулирования производительности насосных и компрессорных установок в химической, нефтедобывающей промышленности, в атомной энергетике, в коммунальном хозяйстве, в мелиорации и других отраслях. Сущность: введенные в устройство для управления асинхронным двигателем, питаемым от сети через управляемый выпрямитель и инвертор, датчики напряжения, фильтраты и усилители-ограничители, связанные с входами блока двухзонного регулирования, обеспечивают оптимальный закон управления асинхронным двигателем в режиме пуска, торможения и стабилизации частоты вращения. 3 ил.
Фиг./
Ц..
Li
Фиг. 2
| Электропривод | 1986 |
|
SU1372580A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1056854, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
