Изобретение относится к электротехнике и может быть использовано в различных отраслях промышленности: химической, горнодобывающей, металлургической, атомной энергетике и других для регулирования скорости мощного асинхронного электродвигателя приводов вентиляторов, компрессоров, газодувок и других, где определяющим являются требования экономии электроэнергии и снижения электрических потерь .
Целью изобретения является улучше- ние энергетических показателей за счет снижения электрических потерь и повышение точности стабилизации частоты вращения.
На фиг.1 и 2 представлены функциональные схемы электроприводов с трехфазным и щестифазным асинхронными двигателями соответственно; на фиг.З принципиальная схема блока задания модуля статорного тока на фиг.4 - принципиальная схема усилителя-ограничителя-, на фиг.5 - регулировочные кривые электропривода; на фиг.6 - векторная диаграмма асинхронного двигателя .
Электропривод содержит асинхронный двигатель 1 (фиг.1), подключенный трехфазной обмоткой к выходу преобразовательной секции 2, состоящей из последовательно включенных управляемого выпрямителя 3, сглаживающего дросселя 4 и автономного инвертора 5, систем управления выпрямителем 6 и инвертором 7 регулятора 8 тока, подключенного выходом к входу системы 6 управления выпрямителем, а одним из своих входов - к выходу датчика 9 тока, установленного на входе управляемого выпрямителя 3, блока 10 моделирования управляемого выпрямите- ля, присоединенного одним из своих входов через датчик 11 напряжения к входу управляемого выпрямителя 3, другим входом - к выходу регулятора 8 тока, а выходом - к одному из вхо дов первого сумматора 12, второй вход которого подключен к выходу пропорционально-дифференцирующего звена 13. Выход первого сумматора 12 подсоединен к одному из входов делительного блока 14. Кроме того, электропривод имеет задающий генератор 15, подключенный выходом к входу сис
Q
15
20 25 30
35
40
45
50
55
темы 7 управления инвертором, а входом - к выходу второго сумматора 16, один из входов которого соединен с выходом датчика ЭДС 17 асинхронного двигателя 1, а другой вход - с выходом регулятора 18 фазы, подсоединенного первым входом к выходу делительного блока 14, регулятор 19 частоты, подключенный одним из входов к выходу задатчика 20 интенсивности, другим входом - к выходу датчика 21 частоты, а выходом регулятор 19 частоты соединен через блок 22 задания модуля статорного тока с вторым входом регулятора 8 тока.
В электропривод введены усилитель- ограничитель 23, фильтр 24, причем усилитель-ограничитель 23 подключен между выходом регулятора 19 частоты и вторым входом регулятора 18 фазы, а фильтр 24 подключен между выходом блока 22 задания модуля статорного тока и входом пропорционально-дифференцирующего звена 13, при этом второй вход делительного блока 14 подсоединен к вькоду датчика ЭДС 17 асинхронного двигателя 1.
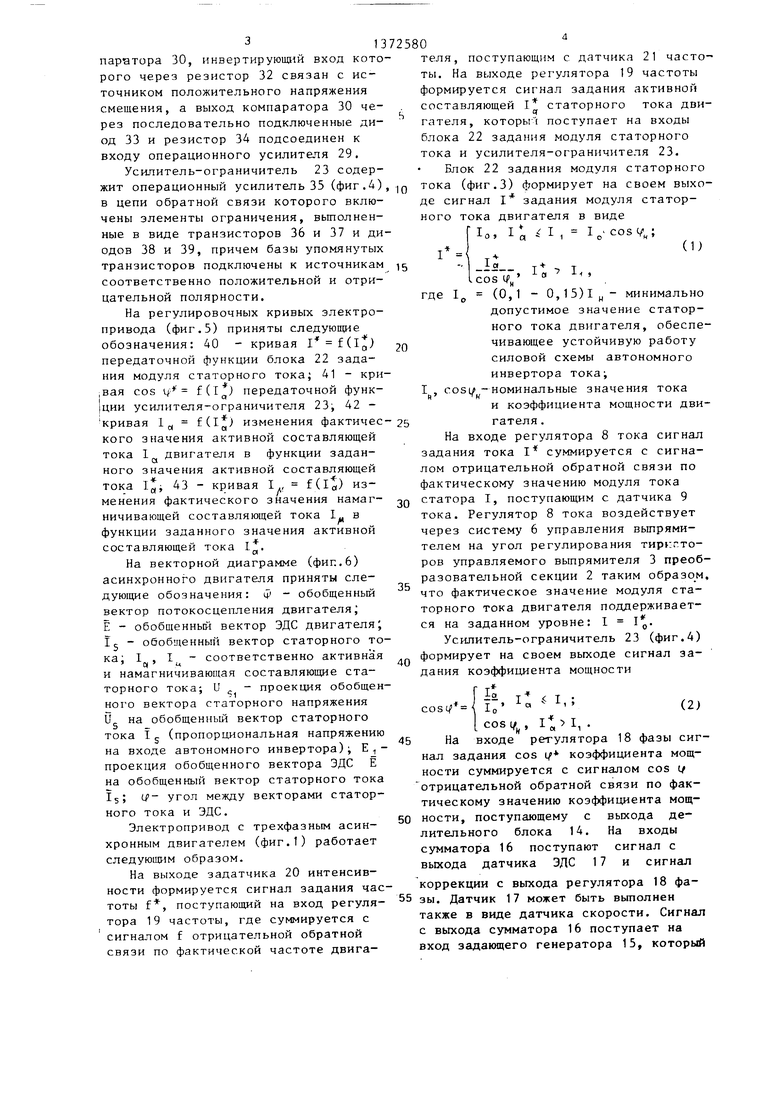
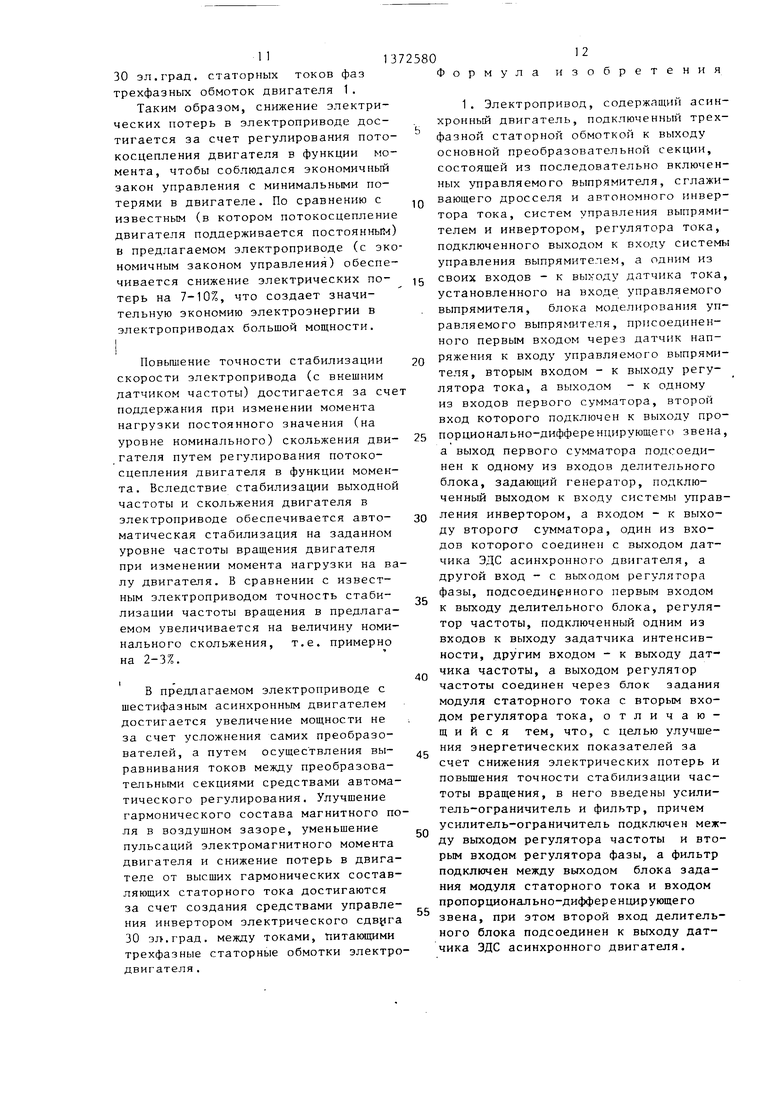
Электропривод с шестифазным асинхронным двигателем содержит дополнительную преобразовательную секцию 25 (фиг.2), вьтолненную аналогично секции 2 и подключенную выходом к второй трехфазной статорной обмотке асинхронного двигателя 1. Регулятор 18 фазы снабжен третьим входом, соединенным с выходом делительного блока преобразовательной секции 25. Одноименные входы преобразовательных секций 2 и 25 соединены попарно между собой.
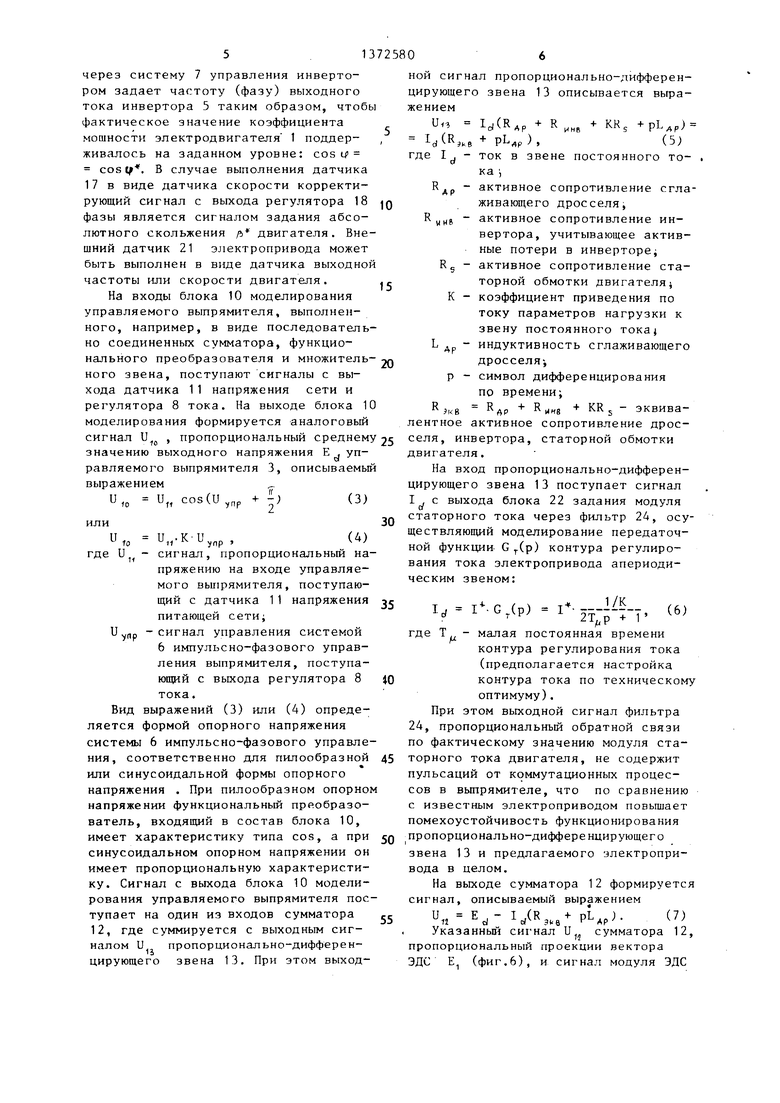
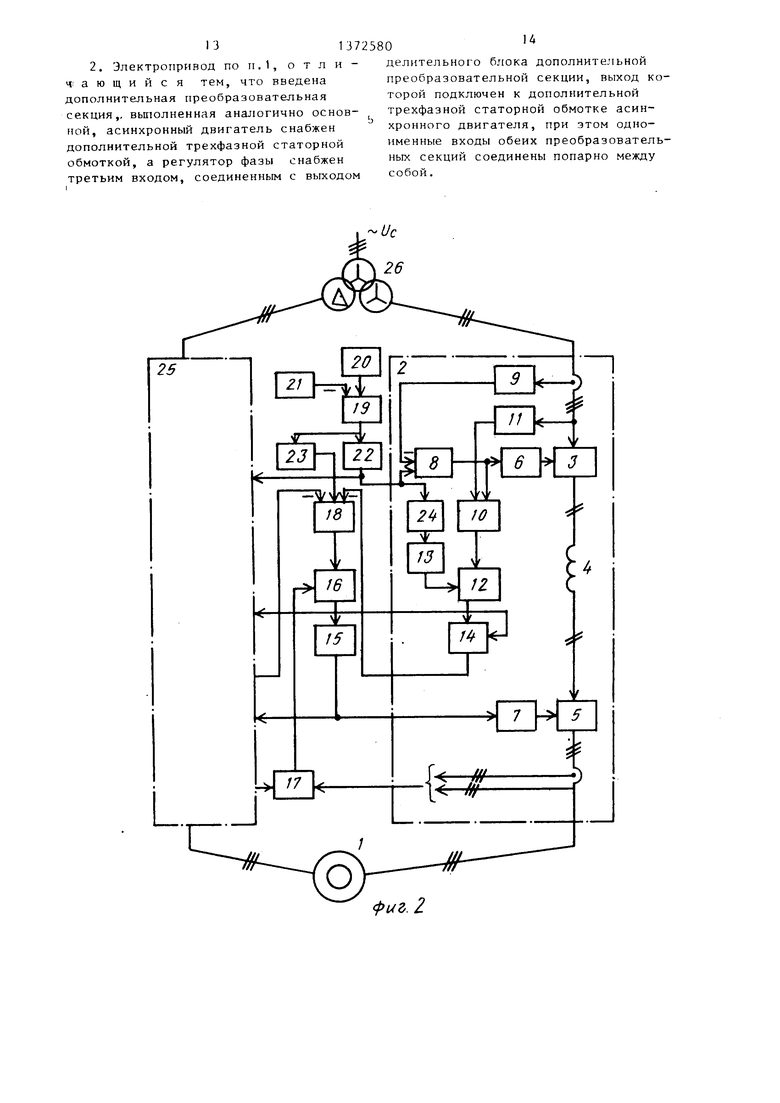
В качестве возможного варианта входы преобразовательных секций 2 и 25 подключены к питающей сети через вторичные обмотки трехфазного трансформатора 26 (с соединением обмоток звезда-звезда rt звезда-треугольник). Блок 22 задания модуля статорного тока (возможный вариант его выполнения) содержит выпрямитель 27 (фиг.З), составленный из двух последовательно включенных операционных усилителей 28 и 29, и узла ограничения, выпол ненного на компараторе 30. Вход и выход выпрямителя 27 являЛтся соответственно входом и выходом блока 22 задания модуля статорного тока. К выходу вьтрямителя 27 подключен через резистор 31 неинвертирующий вход ком31
паратора 30, инвертирующий вход которого через резистор 32 связан с источником положительного напряжения смещения, а выход компаратора 30 через последовательно подключенные диод 33 и резистор 34 подсоединен к входу операционного усилителя 29.
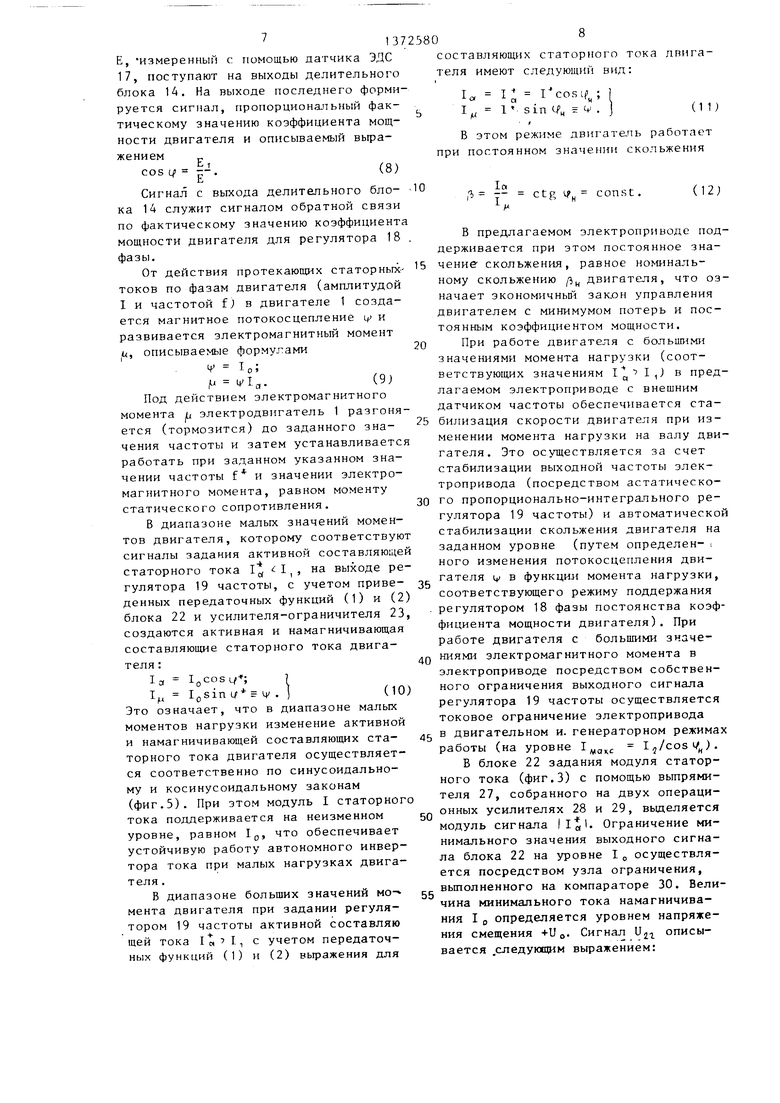
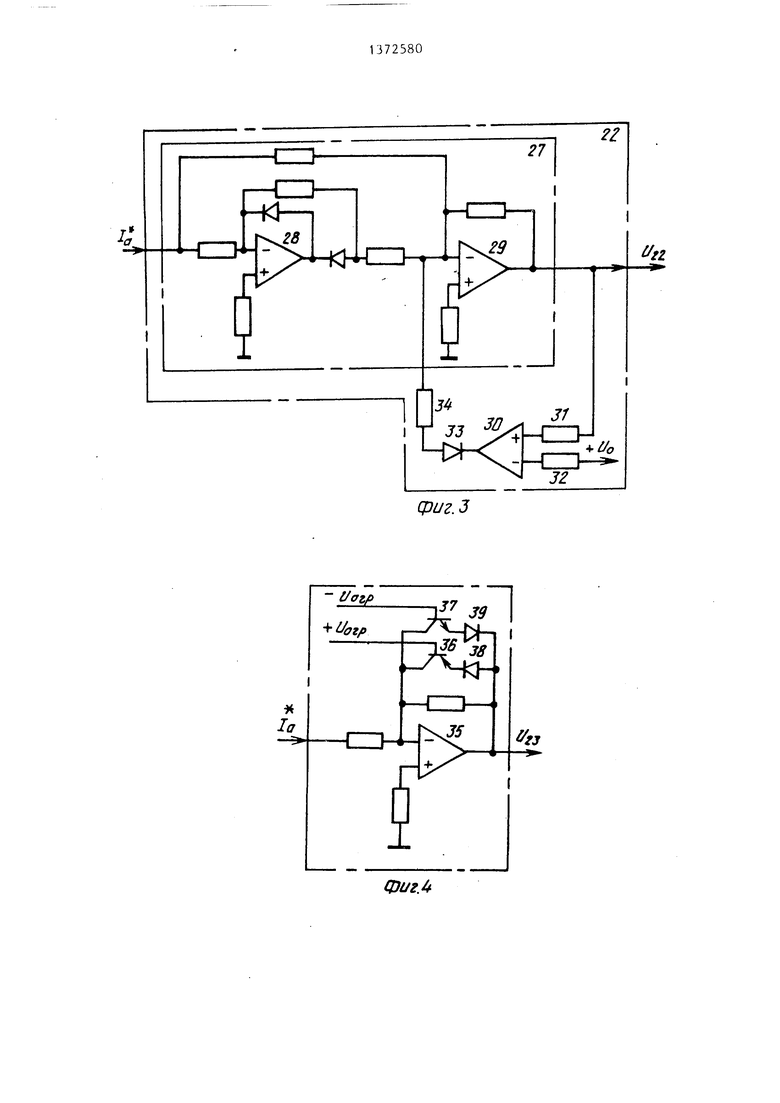
Усилитель-ограничитель 23 содержит операционный усилитель 35 (фиг.4) в цепи обратной связи которого включены элементы ограничения, вьтолнен- ные в виде транзисторов 36 и 37 и диодов 38 и 39, причем базы упомянутых транзисторов подключены к источникам соответственно положительной и отрицательной полярности.
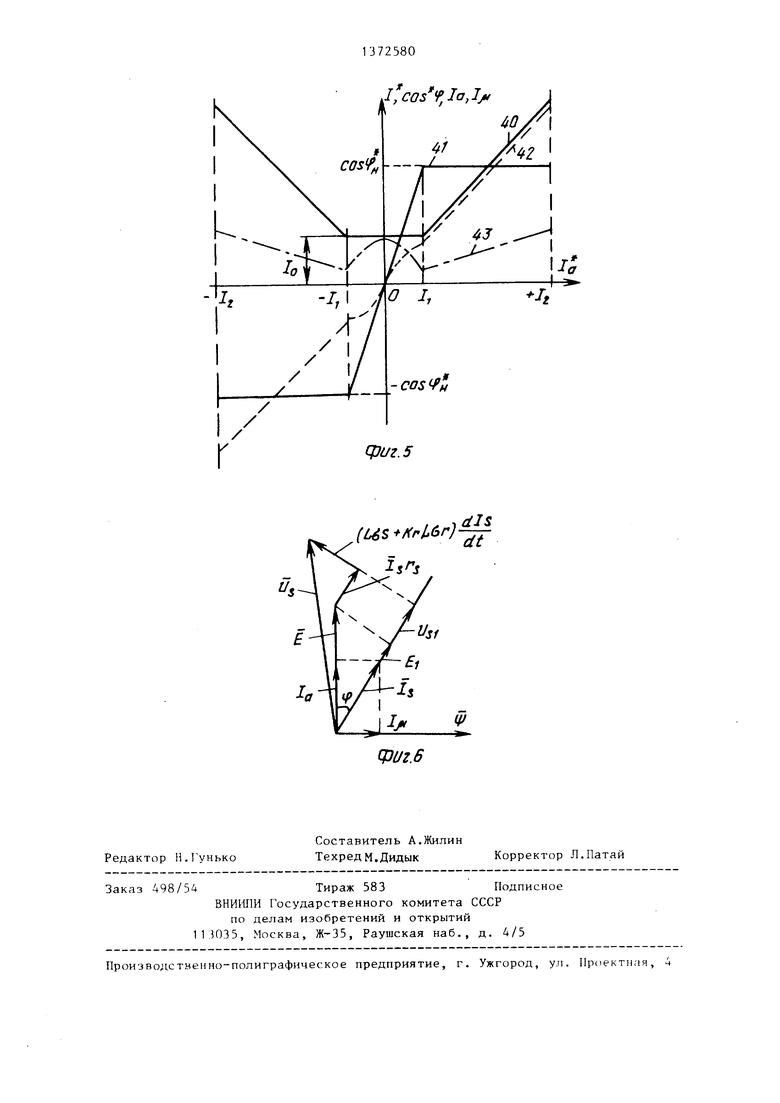
На регулировочных кривых электропривода (фиг.5) приняты следующие обозначения: 40 - кривая I f(lg) передаточной функции блока 22 задания модуля статорного тока; 41 - кривая cos if f(l) передаточной функции усилителя-ограничителя 23; 42 - кривая 1у f(I) изменения фактического значения активной составляющей тока 1 двигателя в функции заданного значения активной составляющей тока lyi 43 - кривая I., f(la) изменения фактического значения намагничивающей составляющей тока I., в функции заданного значения активной составляющей тока 1,
На векторной диаграмме (фип.6) асинхронного двигателя приняты сле- дуюище обозначения: if - обобщенный вектор потокосцепления двигателя, Е - обобщенный вектор ЭДС двигателяJ Ij - обобщенный вектор статорного тока; 1,1 - соответственно активная
« ч
и намагничивающая составляющие статорного тока; и - проекция обобщенного вектора статорного напряжения и на обобщенный вектор статорного тока Ig (пропорциональная напряжению на входе автономного инвертора); проекция обобщенного вектора ЭДС Ё на обобщенный вектор статорного тока is; (f угол между векторами статорного тока и ЭДС.
Электропривод с трехфазным асинхронным двигателем (фиг.) работает следующим образом.
На выходе задатчика 20 интенсивности формируется сигнал задания частоты f, поступающий на вход регулятора 19 частоты, где суммируется с сигналом f отрицательной обратной связи по фактической частоте двига
80
теля, поступающим с датчика 21 частоты. На выходе регулятора 19 частоты формируется сигнал задания активной составляющей I статорного тока двигателя, который поступает на входы блока 22 задания модуля статорного тока и усилителя-ограничителя 23.
Блок 22 задания модуля статорного тока (фиг.З) формирует на своем выходе сигнал I задания модуля статорного тока двигателя в виде
1о, i; . I , I -cosc/ ;
(1)
J- - А -г-
где IP (0,1 - 0,15) минимально допустимое значение статорного тока двигателя, обеспе- чивающее устойчивую работу силовой схемь автономного инвертора тока; I , cosi -номинальные значения тока
и коэффициента мощности дви- гателя.
На входе регулятора 8 тока сигнал задания тока I суммируется с сигналом отрицательной обратной связи по фактическому значению модуля тока статора I, поступающим с датчика 9 тока. Регулятор 8 тока воздействует через систему 6 управления вьтрями- телем на угол регулирования тиркпто- ров управляемого выпрямителя 3 преобразовательной секции 2 таким образо м, что фактическое значение модуля статорного тока двигателя поддерживается на заданном уровне: I I.
Усилитель-ограничитель 23 (фиг.4) формирует на своем выходе сигнал задания коэффициента мощности
. т т lo - (2)
cosi/, , .
На входе регулятора 18 фазы сигнал задания cos g коэффициента мощности суммируется с сигналом cos i/ отрицательной обратной связи по фактическому значению коэффициента мощности, поступающему с выхода делительного блока 14. На входы сумматора 16 поступают сигнал с выхода датчика ЭДС 17 и сигнал
коррекции с выхода регулятора 18 фа- зы. Датчик 17 может быть вьтолнен также в виде датчика скорости. Сигнал выхода сумматора 16 поступает на ход задающего генератора 15, который
513
через систему 7 управления инвертором задает частоту (фазу) выходного тока инвертора 5 таким образом, чтобы фактическое значение коэффициента мощности электродвигателя 1 поддерживалось на заданном уровне: cos t-C cos (f. В случае выполнения датчика 17 в виде датчика скорости корректирующий сигнал с выхода регулятора 18 фазы является сигналом задания абсолютного скольжения /ь двигателя. Внешний датчик 21 электропривода может быть выполнен в виде датчика выходной частоты или скорости двигателя.
На входы блока 10 моделирования управляемого выпрямителя, выполненного, например, в виде последовательно соединенных сумматора, функционального преобразователя и множитель- ного звена, поступают сигналы с выхода датчика 11 напряжения сети и регулятора 8 тока. На выходе блока 10 моделирования формируется аналоговый сигнал и
. , пропорциональный среднему значению выходного напряжения Е , управляемого выпрямителя 3, описываемый выражением
(3)
(4)
и
упр
пряжению на входе управляемого выпрямителя, поступающий с датчика 11 напряжения питающей сети;
- сигнал управления системой 6 импульсно-фазового управления выпрямителя, поступающий с выхода регулятора В тока.
Вид выражений (3) или (4) определяется формой опорного напряжения системы 6 импульсно-фазового управления, соответственно для пилообразной или синусоидальной формы опорного напряжения . При пилообразном опорно напряжении функциональный прр.образо- ватель, входящий в состав блока 10, имеет характеристику типа cos, а при синусоидальном опорном напряжении он имеет пропорциональную характеристику. Сигнал с выхода блока 10 моделирования управляемого выпрямителя поступает на один из входов сумматора 12, где суммируется с выходным сигналом и пропорционально-дифференцирующего звена 13. При этом выходной сигнал пропорционально-дифференцирующего звена 13 описывается выражением
и i,(R,
е I
I(R
+ R
klMB
+ кк
S +рЬдр) (5)
d А р
ке + ) .
ток в звене постоянного тока ,
0
Q
5
5
0
R
АР
нив
R. К АР
Р R
активное сопротивление сглаживающего дросселя, активное сопротивление инвертора, учитывающее активные потери в инверторе; активное сопротивление ста- торной обмотки двигателяi коэффициент приведения по току параметров нагрузки к звену постоянного тока; индуктивность сглаживающего дросселя-,
символ дифференцирования по времени; Rл„ + KR 5 - эквива9| В f,p ИЧ8
лентное активное сопротивление дросселя, инвертора, статорной обмотки двигателя.
На вход пропорционально-дифференцирующего звена 13 поступает сигнал I , с выхода блока 22 задания модуля статорного тока через фильтр 24, осуществляющий моделирование передаточной функции G (р) контура регулирования тока электропривода апериодическим звеном:
Ij (p)
(6)
где
,р + Т
малая постоянная времени контура регулирования тока (предполагается настройка контура тока по техническому оптимуму).
При этом вькодной сигнал фильтра 24, пропорциональный обратной связи по фактическому значению модуля статорного трка двигателя, не содержит пульсаций от коммутационных процессов в выпрямителе, что по сравнению с известным электроприводом повышает помехоустойчивость функционирования пропорционально-дифференцирующего звена 13 и предлагаемого электропривода в целом.
На выходе сумматора 12 формируется сигнал, описываемый выражением
« Е,- I.(R,.e Указанньп сигнал U
pL,p). (7)
сумматора 12, пропорциональный проекции вектора ЭДС Е (фиг.6), и сигнал модуля ЭДС
1
Е, измеренный с помощью датчика ЭДС 17, поступают на выходы делительного блока 14, На выходе последнего формируется сигнал, пропорциональный фактическому значению коэффициента мощности двигателя и описываемый выражением
E,
cos Lf --.
(8)
Сигнал с выхода делительного блока 14 служит сигналом обратной связи по фактическому значению коэффициента мощности двигателя для регулятора 18 фазы.
От действия протекающих статорньгх- токов по фазам двигателя (амплитудой I и частотой f) в двигателе 1 создается магнитное потокосцепление i и развивается электромагнитный момент и, описываемые формулами
If ID;
M flc,.(9)
Под действием электромагнитного момента f электродвигатель 1 разгоняется (тормозится) до заданного значения частоты и затем устанавливается работать при заданном указанном значении частоты f и значении электромагнитного момента, равном моменту статического сопротивления.
В диапазоне малых значений моментов двигателя, которому соответствуют сигналы задания активной составляющей
,
10
-- ctg ч const. м
(12)
В предлагаемом электроприводе под держивается при этом постоянное зна15 чение скольжения, равное номинальному скольжению / двигателя, что оз начает экономичный закон управления двигателем с минимумом потерь и постоянным коэффициентом мощности.
20 При работе двигателя с большими значениями момента нагрузки (соответствующих значениям 1 I,) в предлагаемом электроприводе с внешним датчиком частоты обеспечивается ста25 билизация скорости двигателя при изменении момента нагрузки на валу двигателя. Это осуществляется за счет стабилизации выходно11 частоты электропривода (посредством астатическо30 го пропорционально-интегрального регулятора 19 частоты) и автоматической стабилизации скольжения двигателя на заданном уровне (путем определен- i ного изменения потокосцепления двистаторного тока i - выходе регулятора 19 частоты, с учетом приве- 35 « функции момента нагрузки,
соответствующего режиму поддержания регулятором 18 фазы постоянства коэффициента мощности двигателя). При работе двигателя с большими знлче- 4Q ниями электромагнитного момента в
электроприводе посредством собствен- (Q) ного ограничения выходного сигнала
регулятора 19 частоты осуществляется
денных передаточных функций (1) и (2) блока 22 и усилителя-ограничителя 23, создаются активная и намагничивающая составляющие статорного тока двигателя :
1а I,COSL/ ;
IM lo
Это означает, что в диапазоне малых моментов нагрузки изменение активной и намагничивающей составляющих статорного тока двигателя осуществляется соответственно по синусоидальному и косинусоидальному законам (фиг.5). При этом модуль I статорного тока поддерживается на неизменном уровне, равном 1, что обеспечивает устойчивую работу автономного инвертора тока при малых нагрузках двигателя .
В диапазоне больших значений но- мента двигателя при задании регулятором 19 частоты активной составляю щей тока it 1, с учетом передаточных функций (1) и (2) вьфажения для
токовое ограничение электропривода jg в двигательном и. генераторном режимах
работы (на уровне I
1л/cos У ).
50
55
В блоке 22 задания модуля статорного тока (фиг.З) с помощью вьшрями- теля 27, собранного на двух операционных усилителях 28 и 29, выделяется модуль сигнала lla - Ограничение минимального значения выходного сигнала блока 22 на уровне I осуществляется посредством узла ограничения, выполненного на компараторе 30. Величина минимального тока намагничивания I о определяется уровнем напряжения смещения -t-U Q. Сигнал U описывается .следующим вьфажением:
составляющих статорного тока дпига- теля имеют следующш вид:
1„ И Г cos If
IM
1 sin U n 5 (+ .
(11)
В этом режиме двигатепь работает при постоянном значении скольжения
(8)
10
-- ctg ч const. м
(12)
В предлагаемом электроприводе поддерживается при этом постоянное значение скольжения, равное номинальному скольжению / двигателя, что означает экономичный закон управления двигателем с минимумом потерь и постоянным коэффициентом мощности.
При работе двигателя с большими значениями момента нагрузки (соответствующих значениям 1 I,) в предлагаемом электроприводе с внешним датчиком частоты обеспечивается стабилизация скорости двигателя при изменении момента нагрузки на валу двигателя. Это осуществляется за счет стабилизации выходно11 частоты электропривода (посредством астатического пропорционально-интегрального регулятора 19 частоты) и автоматической стабилизации скольжения двигателя на заданном уровне (путем определен- i ного изменения потокосцепления функции момента нагрузки,
токовое ограничение электропривода jg в двигательном и. генераторном режимах
работы (на уровне I
1л/cos У ).
0
5
В блоке 22 задания модуля статорного тока (фиг.З) с помощью вьшрями- теля 27, собранного на двух операционных усилителях 28 и 29, выделяется модуль сигнала lla - Ограничение минимального значения выходного сигнала блока 22 на уровне I осуществляется посредством узла ограничения, выполненного на компараторе 30. Величина минимального тока намагничивания I о определяется уровнем напряжения смещения -t-U Q. Сигнал U описывается .следующим вьфажением:
11
lo, i;
jldl
COS,,
С
Уснлитель-ог раничитель 23 (фиг .4) формирует на своем выходе сигнал U,, о 1исываемый выражением
, i; ,;
и,,
(14) 10
7
осущестItcos c, I I J I
Ограничение сигнала U вляется с помощью узлов ограничения, выполненнык яа транзисторах 36 и 37, на базы которых подаются напряжения + и и -и jrp соответственно. При птом, напряжение +U соответствует ограничению сигнала U в двигательном режиме работы привода (), а напряжение -U гр - ограничению сигнала и, в генераторном режиме работы привода.
Электропривод с шестифазным асинхронным двигателем 1 (фиг.2), т.е. имеющим две идентичные трехфазные статорные обмотки, сдвинутые в пространстве на 30 эл.град., работает следующим образом.
На выходе задатчика 20 интенсивности формируется сигнал задания на частоту f
137258010
ходах делительных блоков 14 преобра- (13) зовательных секций 2 н 25. Сумматор 16, на выходе которого суммируются сигналы с выходов датчика ЭДС 17 двигателя и регулятора 18 фазы, задает выходную частоту (через задающий генератор 15 и систему 7 управления инвертором) автономного инвертора 5 тока преобразовательньк секций 2 Jj25. Посредством преобразовательных секций 2 и 25 в трехфазных обмотках щес- тифазного двигателя 1 формируются две трехфазные системы токов равной
15 амплитуды (1 I) и частоты.
В результате протекания статорных токов по двум трехфазным статорным обмоткам в двигателе 1 создается магнитное потокосцепление и электромаг20 нитный момент согласно выражению (9), где IV , - результирующие значения потокосцепления и электромагнитного момента от действия двух трехфазных статорных обмоток. Электродвигатель 1
2В разгоняется (тормозится) до заданного значения f частоты и затем устанавливается режим при заданных значениях частоты и значении электромагнитного момента, равном моменту ста3Q тического сопротивления.
, поступающий на вход регулятора 19 частоты, где суммируется с Электропривод (фиг,2) предназначен сигналом f отрицательной обратной Для управления мощными асинхронными связи по фактической частоте двига- двигателями, создаваемыми на основе теля, преступающим с датчика 21 часто- 35 шестифазных двигателей, питающихся ты. На выходе регулятора 19 частоты
от индивидуальных трехфазных преобразователей частоты. При этом силовые схемы преобразователей частоты упрощаются, так как создаются без паралформируется сигнал задания активной составляющей статорного тока 1, который поступает на входы усилителя- ограничителя 23 и блока 22 задания модуля статорного тока 22. Блок 22 задания модуля статорного тока формирует на своем выходе сигнал I задания модуля статорного тока в трехфазных обмотках двигателя 1, поступающий на вторые входы регуляторов 8 тока и входы фильтров 24 идентично выполненных преобразовательных секций 2 и 25. На выходе регулятора 18
Электропривод (фиг,2) предназначен Для управления мощными асинхронными двигателями, создаваемыми на основе шестифазных двигателей, питающихся
от индивидуальных трехфазных преобразователей частоты. При этом силовые схемы преобразователей частоты упрощаются, так как создаются без параллельно включенных тиристоров, т.е. не требуется усложнение преобразователей частоты использованием высоковольтных делителей токов. Выравнивание токов между преобразовательными
секциями осуществляется с помощью регуляторов 8 тока соответствующих секций 2 и 25. Для улучшения гармонического состава кривой магнитного потока в воздущном зазоре шестифаз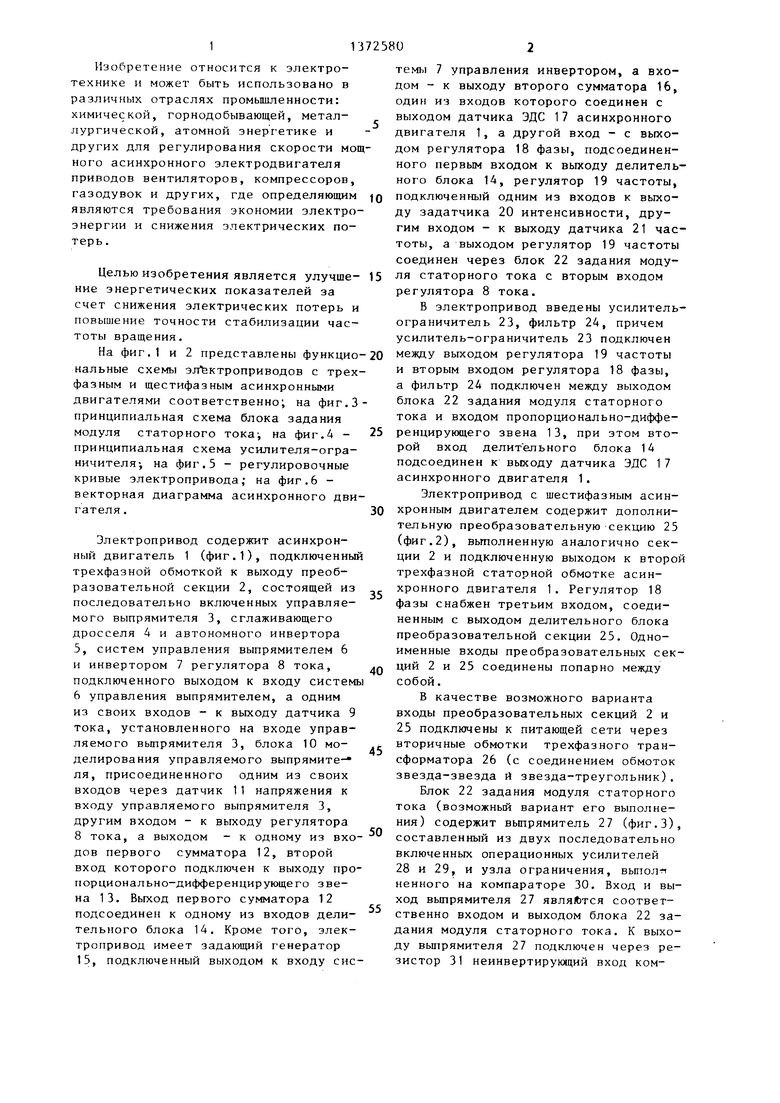
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1985 |
|
SU1309244A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483421C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483422C1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к электротехнике и может быть использовано в химической, горнодобывающей, металлургической и других отраслях народного хозяйства. Целью изобретения является улучшение энергетических показателей за счет снижения электрических потерь и повышение точности стабилизации частоты вращения. Указанная цель достигается введением в электропривод усилителя-ограничителя 23, фильтра 24. Усилитель-ограничитель 23 включен между выходом регулятора 19 частоты и вторым входом регулятора фазы. Фильтр 24 входом соединен с выходом блока 22 задания модуля статорного тока, а выходом - с входом пропорционально-дифференцирующего звена 13. Второй вход делительного блока 14 соединен с выходом датчика ЭДС 17 двигателя 1. В электроприводе обеспечивается регулирование потокосцепления в функции момента, что обеспечивает экономию электроэнергии и автоматическую стабилизацию на заданном уровне частоты вращения при изменении нагрузки на валу двигателя 1. 1 з.п. ф-лы, 6 ил. (С (Л to ел ICX) ful /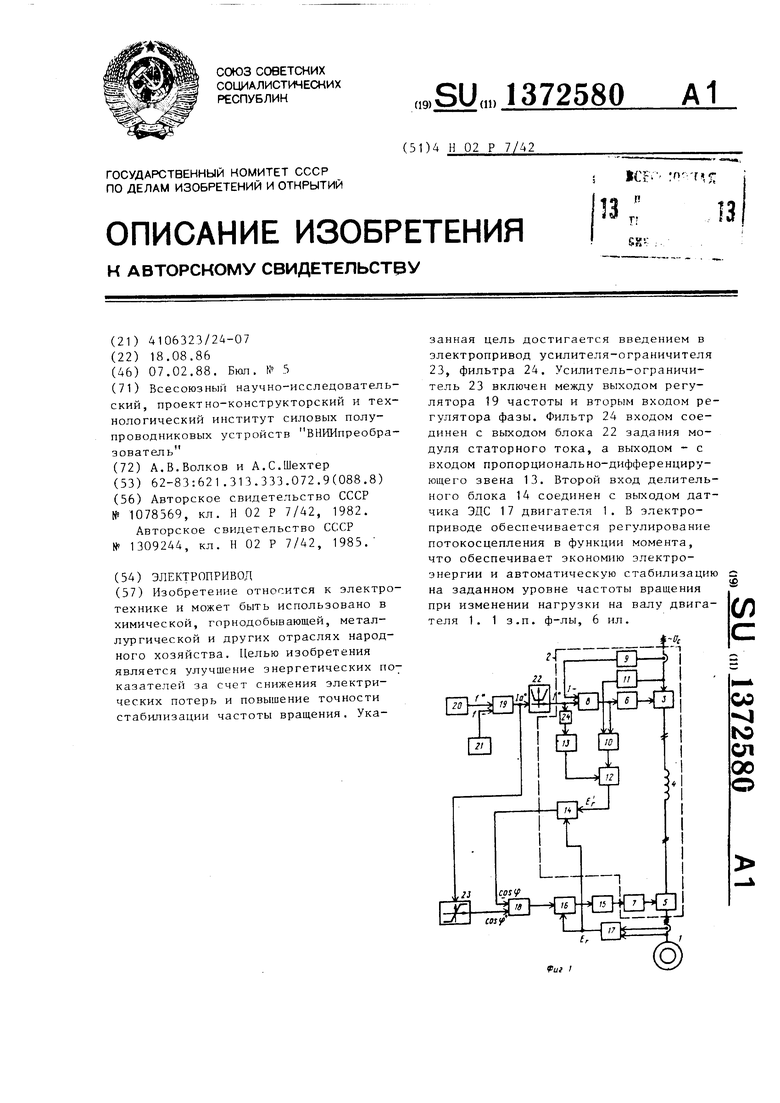
фазы сигнал задания cos коэффициен- gQ ного двигателя 1, а значит для уменьта мощности, поступающий с выхода усилителя-ограничителя 23, суммируется с суммой сигналов отрицательных обратных связей cosi/ коэффициента мощности каждой из трехфазных обмоток шестифазного двигателя 1, Сигналы отрицательных обратных связей по коэффициентам мощности трехфазных обмоток двигателя формируются на вышения пульсации результирующего электромагнитного момента и снижения потерь от высших гармонических составляющих тока в двигателе системы 7 управления инвертором могут быть, как вариант, вьпюлнень со сдвигом выходных импульсов управления 30 зл,град, выходной частоты, что обеспечивает соответствующий сдвиг
30 эл.град. статорных токов фаз трехфазных обмоток двигателя 1 .
Таким образом, снижение электрических потерь в электроприводе достигается за счет регулирования пото- косцепления двигателя в функции момента, чтобы соблюдался экономичный закон управления с минимальными потерями в двигателе. По сравнению с известным (в котором потокосцепление двигателя поддерживается постоянны}-) в предлагаемом электроприводе (с экономичным законом управления) обеспечивается снижение электрических потерь на 7-10%, что создает значительную экономию электроэнергии в электроприводах большой мощности.
Повышение точности стабилизации скорости электропривода (с внешним датчиком частоты) достигается за сче поддержания при изменении момента нагрузки постоянного значения (на уровне номинального) скольжения двигателя путем регулирования потоко- сцепления двигателя в функции момента. Вследствие стабилизации выходной частоты и скольжения двигателя в электроприводе обеспечивается автоматическая стабилизация на заданном уровне частоты вращения двигателя при изменении момента нагрузки на валу двигателя. В сравнении с известным электроприводом точность стабилизации частоты вращения в предлагаемом увеличивается на величину номинального скольжения, т.е. примерно на 2-3%.
I
В предлагаемом электроприводе с
шестифазным асинхронным двигателем достигается увеличение мощности не за счет усложнения самих преобразователей, а путем осуществления выравнивания токов между преобразовательными секциями средствами автоматического регулирования. Улучшение гармонического состава магнитного поля в воздушном зазоре, уменьшение пульсаций электромагнитного момента двигателя и снижение потерь в двигателе от высших гармонических составляющих статорного тока достигаются за счет создания средствами управления инвертором электрического сдвуга 30 эл.град. между токами. Питающими трехфазные статорные обмотки электродвигателя .
ормула
12
3 о
бретения
0
5
0
5
0
6
0
5
0
5
..
г
о
делительного блока дополнительной преобразовательной секции, выход которой подключен к дополнительной трехфазной статорной обмотке асинхронного двигателя, при этом одноименные входы обеих преобразовательных секций соединены попарно между собой.
фиг. 2
+ гЛ
la
сриг.З
37
л
.
.35
Угз
фиг Л
i cos eio,ij,f
Cpi/Z.5
ff J f
(.6r)4JUZ.6
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1078569A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
